You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Information Technology Text BookDocument293 pagesInformation Technology Text BookScribd100% (2)
- App Inventor Cheat SheetDocument9 pagesApp Inventor Cheat SheetNAIR KRISHNA RAVEENDRANNo ratings yet
- Praful Resume Storage BackupDocument5 pagesPraful Resume Storage BackupShawn PrafulNo ratings yet
- Bus Bar Truncking Design For SandwichDocument31 pagesBus Bar Truncking Design For SandwichSanjeev Dhariwal100% (1)
- LAB Manual Mbed PDFDocument20 pagesLAB Manual Mbed PDFjjNo ratings yet
- AppInventorCheatSheet BasicBluetoothDocument3 pagesAppInventorCheatSheet BasicBluetoothjjNo ratings yet
- 03 LS5 Building A Teapot sT8.0 PDFDocument25 pages03 LS5 Building A Teapot sT8.0 PDFjjNo ratings yet
- 3HAC044266 PM IRB 6700-EnDocument864 pages3HAC044266 PM IRB 6700-Enfacebook securityNo ratings yet
- A 8 Bit AluDocument2 pagesA 8 Bit AluEVANS100% (2)
- G1.5-LWL Caterpillar Large Wheel Loader InformationDocument10 pagesG1.5-LWL Caterpillar Large Wheel Loader InformationJulio Ricardo EspinozaNo ratings yet
- Compendium of Notes in Tle: First QuarterDocument10 pagesCompendium of Notes in Tle: First QuarterRaymond PunoNo ratings yet
- Void Linux HandbookDocument150 pagesVoid Linux HandbooknillblenderNo ratings yet
- Os Unit 4 ModifyDocument28 pagesOs Unit 4 ModifyKylee PerezNo ratings yet
- For S.no2 jetson-agx-orin-64GB-developer-kit-datasheet-web-usDocument2 pagesFor S.no2 jetson-agx-orin-64GB-developer-kit-datasheet-web-usMaruthiNo ratings yet
- 2020-Feb-05 - PC EXPRESS - SUGGESTED RETAIL PRICE LISTDocument2 pages2020-Feb-05 - PC EXPRESS - SUGGESTED RETAIL PRICE LISTMael VallejoNo ratings yet
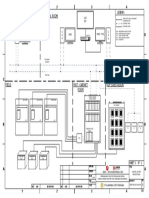
- System ArchitectureDocument1 pageSystem ArchitectureAkbar AffandyNo ratings yet
- OS Assignment 1: Introduction: Student NameDocument2 pagesOS Assignment 1: Introduction: Student NameKiko Doragon Inoue TsubasaNo ratings yet
- HB PST 2010 05 EnuDocument62 pagesHB PST 2010 05 EnuOktay ÇINARNo ratings yet
- Microcomputer ArchitectureDocument121 pagesMicrocomputer Architectureyordi teshomeNo ratings yet
- Lecture 13Document53 pagesLecture 13Areeb Saqib ButtNo ratings yet
- Samsung LN40C630K1FXZA Fast Track Guide (SM)Document4 pagesSamsung LN40C630K1FXZA Fast Track Guide (SM)Carlos OdilonNo ratings yet
- Palit GTX 1080 Ti PG611 Rev A00 PDFDocument49 pagesPalit GTX 1080 Ti PG611 Rev A00 PDFpedro arthur AlvesNo ratings yet
- User Manual: Ultrasonic Anemometer (Document61 pagesUser Manual: Ultrasonic Anemometer (Tuấn Pham MinhNo ratings yet
- M7A39v1.4 B350M GAMING PRO Placa Baza PC IonutDocument21 pagesM7A39v1.4 B350M GAMING PRO Placa Baza PC IonutdjbobyNo ratings yet
- Arithmetic Logic Unit: From Wikipedia, The Free EncyclopediaDocument5 pagesArithmetic Logic Unit: From Wikipedia, The Free Encyclopediahotboy7245No ratings yet
- Boot Camp Beta 1.2: Installation & Setup GuideDocument26 pagesBoot Camp Beta 1.2: Installation & Setup GuidevalenmanNo ratings yet
- Dual Band FM Transceiver: User'S ManualDocument43 pagesDual Band FM Transceiver: User'S Manualjoaquin ferNo ratings yet
- DX DiagDocument32 pagesDX DiagAbdul Jabbar RahmanNo ratings yet
- Trinity Rescue Kit & MultiPass - USB Hacks - Hak5 PDFDocument9 pagesTrinity Rescue Kit & MultiPass - USB Hacks - Hak5 PDFMikiNo ratings yet
- Advanced Computer ArchitectureDocument2 pagesAdvanced Computer Architecturesatraj5No ratings yet
- VxRail 4.0 Technical DifferencesDocument39 pagesVxRail 4.0 Technical DifferenceschindukNo ratings yet
- A - Lightweight - PUF-Based - Authentication - Protocol Using Secret Pattern Recognition For Constrained IoT DevicesDocument14 pagesA - Lightweight - PUF-Based - Authentication - Protocol Using Secret Pattern Recognition For Constrained IoT DevicesJanaNo ratings yet
- Kahuna Mav Remote Installation Manual Iss 2 Rev 1Document31 pagesKahuna Mav Remote Installation Manual Iss 2 Rev 1Dario Emmanuel RodriguezNo ratings yet
- Errlog Sai2 20220214 151200Document3 pagesErrlog Sai2 20220214 151200Vio Gustian's channelNo ratings yet