2) United States Patent
Chowaniec et al
(34) METHOD OF INT
SEALING A HANDI
RNALLY POTTING OR
pLD MEDICAL DEVICE,
(75) Inventors: Matthew Chowanies, Middletown, CT
(US); Ningrul Chen, Hamden, CT
(US); Michael Zemlok, Prospect, CT
(us)
(73) Assignoe: Covidien LP, Mansfield, MA (US)
(9). Notice:
Subject to any dislaimer the term of this
patent is extended or adjusted under 35
USC. 154) by 1213 days
21) Appl. Now 13/017,410
(22) Filed: May 27, 2011
6s) Prior Publication Data
US 201210303002 Al Nov. 29, 2012
(1) Incr.
AGLB 1700 (2006.01)
(6ib 17072 (2006.01)
(2) USL
orc A6IB 17107207 (201301)
(58) Field of Classification Search
CPC sos AGIB 17/00017: AGIB 17/00115; AGLB.
17/00128; GIB 17/00398; AGB.
17/00734: A61B 17107207; AGILE.
17/2927; AGIP 205010813
usp 29/5271 527.4, 611, B41
Se application file for complete search history.
cd
66) References
USS. PATENT DOCUMENTS.
AASS6I3 A 51979 Bran HOI 1196
US010542978B2
(10) Patent No.:
(4s) Date of Patent:
US 10,542,978 B2
Jan. 28, 2020
ATMO A * IDI9ES Arends Gosn 1923
31058
520.7 A+ 21904 Rydell ‘was
S5S48a1 A | 911996 Paterson al
@3onoe BL* $2002 Ane ae
Faas BL* $2010 Roche oo.tis
232686) B2 62010. Brandsaier ea.
7si046 BE 103010 Le
7sasaoT BE 122010 Wan eta
S378572 2" Tina et ist
sasou6 Bo Chin ‘Reis ass
6.206,
2n040ns6sa8 AL Duet al
20080288678 AL Ductal
aono00076 AL Zero tal
dononriea29 Al* Gisjia ssa
21018370 AL 12011 Duet al
FOREIGN PATENT DOCUMENTS
en o1s706 AL 1011985
Gh HISIOS AU 'S/1968
(Cominved)
(OTHER PUBLICATIONS
Furopean Search Report for EP 121604400-2310 date of comple
tion fs Aug. 23, 2012 (9 page)
(Continved)
Primary Bvaminer
(74) Attornes, Agent, or Firm
LLP
Michael 1 D Abreu
Carte, DeL.nea & Farrell
on ABSTRACT
The present disclosure provides @ powered surgical insta
‘ment incloding a housing defining an inner cavity therein; at
Teast one internal component disposed within the housing
‘nd potting material injected into the inner cavity encapst-
Jating at least a portion of the at least one inter compo-
5 Claims, 5 Drawing Sheets
US 10,542,978 B2
Page 2
66) References Cited
PORFIGN PATENT DOCUMENTS
WO Wo set09s7 AL 41996
WO wo 2mn7o0ris0 A2 12007
(OTHER PUBLICATIONS
EPO-TEK 3771 Techctl Data Shes, Jan. 31, 2007, pp. 1
‘PS5038972, reve om the Internet: URL: hips apoek
‘com ses tases. 37h pa [treve on fan. 2002).* “graph
ite fied epoxy”, “ESDEMI shilling of semiconductor devices
td clctonis”*
Extended European Search Report for app. No. 161897111 dated
Feb. §, 2017,
Anonymous “Resin dispensing Wikipedia”, Wikpetia, Nov. 6.
2010 (Nov. 6, 2010), pp 1-6, XPOSS330617, Wikipdiaveuieved
fromthe Internet: URL ps: en.wikipedia.org winds pte
Resin-dspensingoldid-395241833#Sealing of electronic pats
Ircicved om Jan, 27, 2017] "Chapter 8.1 Scaling of electronic
pus
‘Canadian Ofice Action dated Apr. 28,2018 isu in corresponding
‘Astaltn Appl, No. 2.776.740,
* cited by examiner
U.S. Patent Jan. 28,2020 Sheet 1 of §
FIG. 1
U.S. Patent Jan. 28, 2020 Sheet 2 of 5 US 10,542,978 B2
U.S. Patent Jan. 28, 2020 Sheet 3 of 5 US 10,542,978 B2
FIG. 3
US 10,542,978 B2
Sheet 4 of 5
Jan. 28, 2020
U.S. Patent
U.S. Patent Jan. 28, 2020 Sheet 5 of 5 US 10,542,978 B2
(aa $10
SEAL HOUSING
| “a $20
INJECT POTTING MATERIAL INTO
HOUSING
| me $30
SOLIDIFY POTTING MATERIAL
FIG. 5
US 10,542,978 B2
1
METHOD OF INTERNALLY POTTING OR
SEALING A HANDHELD MEDICAL DEVICE
BACKGROUND
‘Technical Pld
The present disclosure relates to @ powered surgical
instrument having housing enclosing a plurality of intemal
‘components, including a drive mechanism an a contol
‘ircuit. More particularly, he present disclosure relates to 3
surgical instrument including intemal components that are
‘encapsulated ina potting material within the housing.
ackground of Related Art
‘Surgical devices whereia tissues first grasped or clamped
between opposing jaw stricture and then joined by surgical
fasteners are well known ia the at. In some instruments @
knife is provided to cut the tissue which has been joined by
the fasteners. The fasteners are typically in the form of
surgical staples but two part polymeric fasteners can also be 2
utilized.
Instruments for this purpose may include two elongated
embers which are respectively used to capture or clamp
tissue. Typically, one of the members caries a staple ca
teidge which houses plurality of staples arranged in atleast
‘wo Tateral rows while the other member has an anil that
‘defines surface for forming the staple Tegs as the staples are
driven from the staple cartridge. Generally, the stapling
‘operation is effected hy cam bars that travel longitudinally
through the staple cartridge, withthe cam bars acting upon
staple pushers to sequentially eject the staples from the
staple cartridge. A knife can travel between the staple rows
to longitudinally eot andor open the taped tissue between
the rows of staples.
In endoscopic or laparoscopic procedures, surgery is
performed through « small incision or through a narrow
‘cannola inserted throvgh small entrance wounds i the ski,
In onder to address the specific needs of endoscopic andor
Japaroscopie surgiesl procedures, endoscopic surgical star
pling devices have been developed
Current known devices can typically require. 10460
pounds of manual hand force to clamp tissue and deploy and
orm surgical fasteners in tissue which, over repented use,
‘can cause a surgeon’s hand to become fatigued. Gas pow=
‘ered pacumatic staplers which implant surgical fasteners
Jno tissue are known in the at, Certain ofthese instruments
tullize a pressurized gas supply which connocts to a trigger
mechanism. The tigger mechanism, when depressed, s
ply releases pressurized gas to implant fastener into tissue
‘Motor-powered surgical staplers are also Known in the ar
‘These include powered surgical staples having motors
‘which activate staple firing mechanisms, However, these
motor powered devices also inelude a variety of intemal
‘components (eg, eiteits) which requte additional protee=
tion from moisture, chemical cleaners, vapors, gases, and
biological contaminants. There i a continual need for new
and improved powered surgical staplers which provide
protection tothe internal components
SUMMARY
“The present disclosure provides a powered surgical insta
‘ment including a housing defining an inner cavity therein; st
Jeast one intemal component disposed within the housing
‘and potting material injected into the inner cavity encaps-
lating at least a portion of the atleast one internal compo=
nent
0
o
2
‘The present disclosure also provides @ method for man
‘eturing a powered surgical device. The method includes
injecting a Tiguid potting material injected into @ housing
defining an inner cavity therein, the housing including at
least one internal component disposed within the housing
and sotidifying the potting material. encapsulate at least a
portion ofthe at least one infernal comportnt.
The present disclosure further provides a powered surgi-
cal instrument. The instrament includes a howsing defining
an inner cavity therein, the housing including handle
portion: a body portion extending distally from the handle
Portion a tool assembly disposed at a distal end ofthe body
portion: a contol circuit and a drive motor disposed withia
the inner cavity, wherein the drive motor is mechanically
coupled 10 the Tool assembly and the control circuit is
configured to control the operation ofthe drive motor; and
‘8 potting material injected into the inner cavity encapstlat-
‘ng atleast a portion of atleast one ofthe contol ciruit and
the drive motor,
[BRIEF DESCRIPTION OF THE DRAWINGS
Various. embodiments of the subject instrument are
scribed hercin with reference to the drawings wherci:
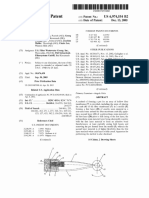
FIG. 1 is & perspective view of a powered surgical
instrument aeconting tothe present disclosure
FIG, 2 is a panial enlarged perspective view of the
powered surgical instrament according to the embodiment
fof the present disclosure of FIG. 1 according tothe present
disclosure,
FIG. 3 is a partial enlarged plan view of the powered
surgical instrument according to the embodiment of the
present disclosure of FIG. 1 according to the present dis
closure: and
FIG. 4 is a partial perspective sectional view of intemal
‘components of the powered surgical instrument of FIG, 1
according to the present disclose.
FIG. § is a Mlowehart of an embodiment of a method of
injecting potting material according to the present diselo-
DETAILED DESCRIPTION
Embodiments of the presently disclosed powered surgical
instrument are now deseribed in deal with reference to the
drawings, in which like reference numerals designate iden-
tical or corresponding elements in each of the several views
As used herein the tem “stl refers to that portion ofthe
powered surgical instrument, or eomponent thereof, farther
from the user while the term “proximal” refers to that
portion of the powered surgical instrument or component
{hereo, loser to the usr.
‘A powered surgical instrument ea surgical stapler, ia
cordance with the present disclosure is refered to in the
Tigures as reference numeral 10, Refering intially o FIG.
1, possered surgical instrament 100 includes a housing 110,
an endoscopic portion 140 defining a first longitudinal axis
‘A-Acextending therethrough, and an arteulating too! assem
bly (ex. end effector 160), defining a second longitudinal
axis B-B extending therethrough. Endoscopic portion 140
extends distally from housing 110 and the end effector 160
js disposed adjacent a distal portion of endoseopie portion
140. In an embodiment, the components of the housing 110
fare sealed against infiration of particulate andor Avid
contamination and help prevent damage ofthe components
by sterilization processes, The instrament 100 also inclxdes
a power source 300
US 10,542,978 B2
3
According to an embodiment of the present disclosure,
‘end efector 160 includes a first jaw member having one oF
more surgical fsteners (ex, cartridge assembly 168) and a
second opposing jaw member ineliding an anvil portion for
‘deploying and forming the surgical festeners (eg. an anvil
assembly 162). In certsin embodiments, the staples are
housed in cartridge assembly 166 to apply linear rows of
staples to hody tissue either in simultancous or sequential
‘manner. Ether one or both ofthe anvil assembly 162 and the
cartridge assembly 164 are movable in relation to one
‘another between an open positon, in which the anvil assem
bly 162 is spaced from vartidge assembly 164, and ua
approximated or clamped position, in. which the anvil
assembly 162 is in juxtsposed alignment with canridge
assembly 164,
Tris further envisioned that end effector 160 is attached 10
‘8 mounting portion 166, which is pivotably attached to 2
body portion 168. Body portion 168 may be integral with
‘enxdoscopie portion 140 of powered surgical instrument 100,
for may be removably attached to the instrument 100 16
provide a replaceable, disposable loading unit (DLU) or
ingle use loading unit (SULU) eg, loading unit 169). Ia
certain embodiments, the reusable portion may be config
lured for sterilization and re-use in subsequent stngical
procedure.
The loading unit 169 may be connectable to endoscopic
Portion 140 through bayonet connection. Iti envisioned
that dhe loading unit 169 has an areulston Tink connected
to mounting portion 166 of the loading unit 169 and the
‘antculation link is connected ta Finkage rod so thatthe end
effector 160 is articulated as the linkage rd is translated in
the dista-proximal direction along fit longitudinal axis
ASA. Other means of connccting end effector 160 to end
scopic portion 140 to allow articulation may’ be wsed, sve!
fe 8 Bexible the or a tube comprising a plurality of
pivotable members.
“The loading unit 169 may incorporate or be configured to
incomporate various end effectors, such as vessel sealing
devices, lincar stapling devices, circular stapling devices,
‘utters, graspers, ete, Such end effectors may’ be coupled 10
‘enudoscopic portion 140 of powered surgical instrament 100,
An intermediate flexible shaft may be included between
handle portion 112 and loading unt, It is envisioned that the
incoporation of a flexible shaft may facilitate access 10
‘andioe within certain areas of the body.
‘With reference to FIGS. {and 2, an enlarged view of the
housing 110s illustrated according to an embodiment ofthe
present disclosure, In the illustrated embodiment, housing
110 includes « handle portion 112 having a main drive
switch I14 disposed theteon. The switeh 114 may include
first and second switches 114 and 1148 formed together as
a toggle switch. The handle portion 112, which defines &
handle sais 1-H, is configured o be grasped by fingers of @
tier. The handle portion 112 has an ergonomic shape pro-
viding ample palm grip leverage which helps prevent the
handle portion 112 from heing squcezed out ofthe user's
hand during operation. Fach switch 114 and 114bis shown
as being disposed at suitable location on handle portion
112 to facilitate its depression by a users finger o fingers.
‘Additionally, and with continued reference to FIGS. Land
2, switehes 14a, 1146 may be used for stating andor
‘stopping movement of # drive mechanism (eg, drive motor
200) (FIG. 4). The drive motor 200 is configured t0 actuate
the end effector 160, including but not limited t, articuls
tion, closing of the jaw members, ejection of fasteners
citing, andthe like. in one embodiment. the switch Ida is
‘configured to aetvate the drive motor 200 in first direction
0
o
4
fo advance fring rod (not explicitly shown) in a distal
direction thereby approximating the anvil and the eardge
asseublies 162 and 164, Conversely, the switeh 1146 may
be configured to retract the firing od to open the anvil and
cartidge assemblies 162 and 164 by activating the drive
‘motor 200 in a reverse direction, The retraction mode
initiates mechanical lock out, preventing futher progres-
sion of stapling and cutting by the loading unit 169. The
foggle has a fist position for activating switeh M14, @
sevond postion lor activating switch 114B, and a neutral
position between the first and second positions, Further, the
Switches 14a and 114 may have high tactile feedback
requiring increased pressure for activation,
Tn one embodiment, the switches 14a and 1146 are
configured as multi-speed (eg, 1 or more), ineremental or
Variable speed switches which control the speed ofthe drive
‘motor 200 an! the fring rod in a non-linear manner. For
ample, switches Ida, 114b can be pressure-seasitive,
This type of contol interface allows for gradual increase in
the rate of speed ofthe drive components From a slower and
‘more precise mode to a faster operation. To prevent acc
ental aetivation of retraction, the switch 4% may be
‘sconnected electronically util a fail safe switch Ide is
pressed
The switehes 14a and 114) are coupled to a noa-linear
speed control circuit 400 which may inehude a noa-linear
speed control circuit implemented as a voltage regulation
circuit, a variable resistance circuit, or microelectronic
pulse width modulation eireut. The switches Ia and 144
‘may interface with the contol cieuit 400 by displacing oF
actuating variable contro! devices, such as thoostatic
‘devices, multiple position switeh cient, Hinear andor olary
variable displacement transducers, linear andlor rotary
potentiometers optical encoders, ferromagnetic sensors, and
Hall Effect sensors. Ths allows the switehes 14a and 114
tw operate the drive motor 200 in multiple speed modes, such
fas gradually increasing the speed of the drive motor 200
cither inecomentally oF graduslly depending on the type of
‘the control circuit being used, based on the depression of the
switches Hea and 1140,
FIGS, 2-4 illustrate an articulation mechanism 170
including an ariculation howsing 172, a powered articul-
tion switch 174, an articulation motor 132 and # manval
aniculation knob 176. Translation of the powered articul-
‘ion switch 174 or pivoting of the manual articulation kaob
176 activates the aniculation motor 1¥2 which then actuates
‘an articulation gear 233 of the atculation mechanism 170
‘as shown in FIG. 4, Actuation of articulation mechanism 170
teases the end effector 160 {0 move from its Hest position,
‘where longitudinal axis B-B is substantially aligned with
longitudinal axis A-A, towands a position in whieh longitu-
inal axis B-B is disposed stn angle to fongitudinal sxis
\-A. The powered articulation switch 174 may also incor-
porate similar non-linear spesd controls as the clamping
srechanism,
‘Additionally, articulation hovsing 172 and powered
aniculaion switch 174 are mounted to a rotating housing
assembly 180, Rotation of a rotation knob 182 about first
Tongitudinal axis A-A causes housing assembly 180 28 well
ay articulation housing 172 and powered articulation switch
174 (0 rotate about first longitudinal axis AA, and thus
rotating the end effector 160 about first longitudinal sxis
A-A. Tho articulation mechanism 170 is electeo-mechani-
cally coupled to one or more conductive rings that are
disposed on a housing nose assembly 188 (FIG. 4). The
‘onctive rings may be saldered andor crimped onto the
rose assembly 155 an are in electical contaet with the
US 10,542,978 B2
5
power source 300 thereby providing electrical power to the
ficlation mechanism 170, The nose assembly 188 may be
modular and may be attached to the housing 110 during
assembly to allow for easier soldering and/or erimping ofthe
Fings. The articulation mechanism 170 may include one oF
‘more brush andlor spring oaded contacts in contact with the
‘conductive rings such that a8 the housing assembly 180 is
rotated along with the articulation housing 172 the arcu
Jation mechanism 170 is in continuous contact with the
‘conductive rings thereby receiving electrical power fom the
power source 300,
Further dels’ of anieulation housing 172, powered
‘anicultion switch 174, manual articulation knob 176 and,
providing articulation to end effector 160 are described in
‘deta in commoaly-ovned US. patent application Se. No,
11/724,733 filed Mar. 15, 2007, the eontents of whieh are
hereby incorporated by reference in their entirety. It is
‘eavisioned that any combinations of limit switches, prox-
lmity sensors (ea, optical and/or ferromagnetic), linear
Variable displacement transducers and shaft encoders which
may be disposed within housing 110, may be wilized to
‘control andiar recont an articulation angle of end effector
160 and/or postion of the fring rod 220,
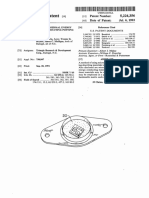
‘As showin in FIG. 4, the instrament 100 also ineludes the
‘contol circuit 400 electrically coupled to the motor 200 and,
various sensors disposed inthe insteument 100. The sensors
defect various operating parameters of the instrument 100
(ex, linear speed, rotation speed, aniculaion position,
temperature, battery charge, and the like), which are then
reported to the control circuit 400, The conto} circuit 400
may then respond accordingly to the measured opersting
parameters to contol the setuation of the end effector 160
(ea adjust the sped of the motor 200, contro articulation
angle, shut-off the power supply, report eeror conditions,
ete)
“As shown in FIGS, 3 and 4, the conteolczcuit 400 is also
‘coupled to one or more visual devices which may include
‘one oF more colored visible lights or light emitting diodes
401 CLED") to relay feedback to the user. The LEDs 401
‘may disposed on top of the honsing 110 such thatthe LEDs
4401 are mised and protrde in relation tthe housing 110
providing for better visibility thereof as shown in FIG. 4 In
‘embodiments, the LEDs 401 may be disposed within the
housing. 110 as shown ia FIG, 4. The LEDs 401 may be
‘setivaed in a various combinations to denote
‘The multiple Fights may be activated in a certain combi
nation to lustatea specific operational mode tothe use. Ia
‘one embodiment, the LEDs 401 jnchude a phiality of
multi-colored lights—a first light (ex. yellow), a second
Tight (est, green) and a third light (ered), The hts are
‘operated in # particular combination associated with 3
Particular operational mode as liste in Table 1 below.
Tails OF or Storeng Senne
fection Rot Neti wa
Taig OF”
0
o
6
TABLE L-sontinued
suse Sue _ Open Mode
Fie ige NA Totnancm 100 dete wd pene
Second it OF fun ang spc or emang
Thiig Na,
Fine Lit On" Ane loatiog i 10 ode he et
Stcod ight On eto 16 ly laps ad the
Thiol Ligit Of inant 100 tm fe spe al tig
ides,
Fine Lie On Due high tating fres«pulse mode
Secu ight Fishing in eect proving ra ted de
Thin Ligh OF hich de compet
Fitige NA. Resssen emom doested
Sccondisk NA
Thin OF
Fine Lig On Tie sks adr Sing ot high
Sccondisht On the waming sub overden
Fiore NA Pansona symm enor ie tetas
Sccond‘ight NA 1 ehoul be eae
In another embodiment, the LEDs 401 may he mul
colored LEDs which display a particular color associated
‘with the operational modes as discussed above with respoct
to the fis, sooond and third lights in Table 1
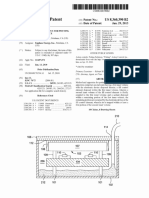
‘The housing 110 defines an inner eavity 402 in whieh the
contol eireit 400 and the motor 200 as well as other
‘components of the instrament 100 are disposed, With re
ference 10 FIG. 5, during step $20, a potting material 404 is
injected into the cavity 402 s0 thatthe material flows into
‘nd through the cavity 402, thereby coating and encapst-
lating the intemal components (eg, the contol circuit 400
and the motor 200) ofthe instrument 100. The material 404
‘may be injected such thatthe cavity 402 s either partially or
‘wholly filled with the material 404, Encapsulation of the
internal components eliminates voids within the inner cavity
4402, which may collect moisture and condensation. Further,
the material 404 als seals the components, therchy provide
‘ng protection from moisture, chemical compounds (¢g.
cleaners) vapors, g25S¢5, and biological contaminants. This
‘would also allow for sterilization of the instrument 100
providing for multiple uses,
Prior to injecting the material 404 into de housing 110
uring slep S20, the housing 110 may be suitably sealed
‘during step $10 to withstand pressures ofthe sealing process
as well 2s to hemmetcaly seal the housing 110 as described
above. The material 404 may be any material that may be
‘any liquid or amorphous material that solidifies upon injee-
‘ion into the cavity 402, In embodiments, the material 404
may be any material or combination of materials (ex.
epoxy) that may change its phase after injection into the
‘housing 110, such hat the material 404 is initially ina iguid
phase and then transitions into solid phase to eneapsulste
‘he components, Once solidified during step $30, the mate-
rial 404 may be relatively rigid to protect the components
{rom shock, maintain compliance and to reduce stress under
‘temperature extrenes an! other environmental conditions
ezsbodiments, the material 404 maybe aliquid sari
that may be solidified by one of the following processes
\hiel include, but are not imited to, room temperature
vuleanization, a thermosetting polymer reaction (e,
epoxy), curing (eg, anaerobic or ultfa-viole) and combi-
nations thereof. The material 404 may be a polymer, which
‘may include, but not limited to, polyesters, silicones, rub-
bers, epocies, nylons, polyphthalamide, lguid crystal poly-
anes, and combinations thereo
US 10,542,978 B2
7
The material 404 once solidified may have a hardness as
smessured bya durometer fom about § Shore Aw abot 100
Shore A in embosinents from about 10 Shore to about 30
Shore: In embodiments, the material 404 may be compl
‘ant anor elastic. This prevent hgh physical stoss that thes
‘nsirament 100 is subjected o from being transfered to the
internal components sno in embodiments where compo-
nents or mlerils of the instrament 100 have diserepant
thermal expansion properties. In addition, elasticity ofthe
taleial 404 absorbs noise aad vibration yeneratd by the
‘ive moror 200 and oiber drive mechanisms, which
‘eahances the handling caractrisis of the instrument 100
“The material 404 may ince one or more thermally
conductive andlor dickectie additives to draw themmal
‘energy from the components a Well st electrically isolate
‘lectonie and other sensitive components (e, deve
mechanisms, batteries, et) In ation, material 44 thats
themully conductive also reduces theaaal shock and tee
perature extremes associated with strlization (eg suo-
‘having) processes The motel 404 may bave « them >
‘conductance from abou 0.024 watts per meters C. (Winn?
C) and ahove, The material 404 may have an clactecal
resistance fm about 3 millivolts per cer unr standard
temperature and pressure (STP) (nVim) and above. The
material 404 may have a coeficient of thermal expansion
from about 1 pacts per millon” C. (ppm? C.) t about 30
ppm” C, in embodiments from about 5 ppm” Co about
20 ppav C. The material may have a surface energy fom
abot 10 dynes por centimater (dynesem’) to abou 45
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- United States Patent (10) Patent No.: US 8,360,390 B2Document9 pagesUnited States Patent (10) Patent No.: US 8,360,390 B2Vansala GanesanNo ratings yet
- United States Patent (10) Patent No.: US 7.460,350 B2: Talbot Et Al. (45) Date of Patent: Dec. 2, 2008Document27 pagesUnited States Patent (10) Patent No.: US 7.460,350 B2: Talbot Et Al. (45) Date of Patent: Dec. 2, 2008Vansala GanesanNo ratings yet
- US7897234Document6 pagesUS7897234Vansala GanesanNo ratings yet
- US20190027305A1Document52 pagesUS20190027305A1Vansala GanesanNo ratings yet
- United States Patent: Ledgerwood Et Al. Jun. 14, 2016Document16 pagesUnited States Patent: Ledgerwood Et Al. Jun. 14, 2016Vansala GanesanNo ratings yet
- United States Patent (10) Patent No.: US 7,208,943 B2: Godoy Et Al. (45) Date of Patent: Apr. 24, 2007Document15 pagesUnited States Patent (10) Patent No.: US 7,208,943 B2: Godoy Et Al. (45) Date of Patent: Apr. 24, 2007Vansala GanesanNo ratings yet
- US6801420Document27 pagesUS6801420Vansala GanesanNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,183,661 B2 Bogner Et Al. (45) Date of Patent: Feb. 27, 2007Document7 pagesUnited States Patent: (12) (10) Patent No.: US 7,183,661 B2 Bogner Et Al. (45) Date of Patent: Feb. 27, 2007Vansala GanesanNo ratings yet
- United States Patent: Zy 2X ZZZZZZZZDocument8 pagesUnited States Patent: Zy 2X ZZZZZZZZVansala GanesanNo ratings yet
- United States Patent: Rubinsztajn Et Al. Oct. 14, 2003Document14 pagesUnited States Patent: Rubinsztajn Et Al. Oct. 14, 2003Vansala GanesanNo ratings yet
- IIII: United States PatentDocument9 pagesIIII: United States PatentVansala GanesanNo ratings yet
- United States Patent: (10) Patent No.: US 6,974,554 B2Document8 pagesUnited States Patent: (10) Patent No.: US 6,974,554 B2Vansala GanesanNo ratings yet
- United States Patent (10) Patent No.: US 6,702,561 B2Document11 pagesUnited States Patent (10) Patent No.: US 6,702,561 B2Vansala GanesanNo ratings yet
- United States Patent (10) Patent No.: US 6,685,832 B2: Mahendran Et Al. (45) Date of Patent: Feb. 3, 2004Document31 pagesUnited States Patent (10) Patent No.: US 6,685,832 B2: Mahendran Et Al. (45) Date of Patent: Feb. 3, 2004Vansala GanesanNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument15 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentVansala GanesanNo ratings yet
- United States Patent (10) Patent No.: US 6,611,186 B2Document12 pagesUnited States Patent (10) Patent No.: US 6,611,186 B2Vansala GanesanNo ratings yet
- United States Patent (19) : Molthop 11) 4,389,363Document6 pagesUnited States Patent (19) : Molthop 11) 4,389,363Vansala GanesanNo ratings yet
- United States Patent (19) 11) Patent Number: 5,224,356: Bryant James C. Mulligan, Both of 3. - SE 5ta. IIDocument7 pagesUnited States Patent (19) 11) Patent Number: 5,224,356: Bryant James C. Mulligan, Both of 3. - SE 5ta. IIVansala GanesanNo ratings yet
- United States Patent (19) 11 Patent Number: 6,113,782Document22 pagesUnited States Patent (19) 11 Patent Number: 6,113,782Vansala GanesanNo ratings yet
- United States Patent (19) : 11 Patent Number: 4,479,990 45 Date of Patent: Oct. 30, 1984Document7 pagesUnited States Patent (19) : 11 Patent Number: 4,479,990 45 Date of Patent: Oct. 30, 1984Vansala GanesanNo ratings yet
- United States Patent (19) : Heyke Et Al. Feb. 23, 1993Document4 pagesUnited States Patent (19) : Heyke Et Al. Feb. 23, 1993Vansala GanesanNo ratings yet
- United States Patent 19: May 7, 1981 (Del Fed. Rep. of Germany. 3118130Document4 pagesUnited States Patent 19: May 7, 1981 (Del Fed. Rep. of Germany. 3118130Vansala GanesanNo ratings yet
- United States Patent (19) 11 Patent Number: 4,738,892: Canova (45) Date of Patent: Apr. 19, 1988Document5 pagesUnited States Patent (19) 11 Patent Number: 4,738,892: Canova (45) Date of Patent: Apr. 19, 1988Vansala GanesanNo ratings yet
- United States Patent (191: Fujimoto (11) 4,190,411Document7 pagesUnited States Patent (191: Fujimoto (11) 4,190,411Vansala GanesanNo ratings yet
- United States Patent (19) : Owens Et AlDocument5 pagesUnited States Patent (19) : Owens Et AlVansala GanesanNo ratings yet
- United States Patent (19) : EaringDocument7 pagesUnited States Patent (19) : EaringVansala GanesanNo ratings yet
- US3747037Document13 pagesUS3747037Vansala GanesanNo ratings yet
- United States Patent: (45) June 6, 1972Document7 pagesUnited States Patent: (45) June 6, 1972Vansala GanesanNo ratings yet
- US3929717Document4 pagesUS3929717Vansala GanesanNo ratings yet
- United States Patent (19) : Brady (45) Aug. 28, 1973Document4 pagesUnited States Patent (19) : Brady (45) Aug. 28, 1973Vansala GanesanNo ratings yet