You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Adaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitDocument13 pagesAdaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitMohammed salah Abd elouahabNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Made Easy: Lockdown Period Open Practice Test SeriesDocument16 pagesMade Easy: Lockdown Period Open Practice Test SeriesVivek BhandariNo ratings yet
- Sampling and Reconstruction FundamentalsDocument22 pagesSampling and Reconstruction Fundamentalsyohannes woldemichaelNo ratings yet
- LTIDocument67 pagesLTIElectron FlowNo ratings yet
- Unit 2 - Signal SystemDocument69 pagesUnit 2 - Signal SystemAnitha DenisNo ratings yet
- Note 1470368643Document10 pagesNote 1470368643abhishekNo ratings yet
- ELEG 3124 Fourier Series and Transforms AssignmentsDocument16 pagesELEG 3124 Fourier Series and Transforms AssignmentsNguyễn Văn ĐứcNo ratings yet
- Fourier AnalysisDocument47 pagesFourier Analysismerdota100% (1)
- Mathematics 08 02063Document14 pagesMathematics 08 02063Sudipta MaityNo ratings yet
- ECE1004 - Digital Assignment 3Document1 pageECE1004 - Digital Assignment 3AnubhavPradhanNo ratings yet
- ML DetectorDocument37 pagesML DetectorMuhammad Wasif KhanNo ratings yet
- Ect204 Signals and Systems, June 2022Document4 pagesEct204 Signals and Systems, June 2022instapc0210No ratings yet
- 3TR4 Exam 2015Document3 pages3TR4 Exam 2015RezaNo ratings yet
- sns_2021_기말(온라인)Document2 pagessns_2021_기말(온라인)juyeons0204No ratings yet
- EENG 226 Midterm Exam F13-14 SolnDocument6 pagesEENG 226 Midterm Exam F13-14 SolnTlektes SagingaliyevNo ratings yet
- Discrete Time Control Systems Unit 5Document23 pagesDiscrete Time Control Systems Unit 5kishan guptaNo ratings yet
- SDOF Forced VibrationsDocument15 pagesSDOF Forced VibrationsSachin BharadwajNo ratings yet
- CH 07Document51 pagesCH 07陳浚維No ratings yet
- 5 Discrete Processing of Analog SignalsDocument21 pages5 Discrete Processing of Analog SignalsCHARLES MATHEWNo ratings yet
- DT Fourier Transform (Exercises)Document1 pageDT Fourier Transform (Exercises)Emmanuel CorreaNo ratings yet
- EE419 Digital Communication Systems QuestionsDocument7 pagesEE419 Digital Communication Systems QuestionsSalai JeyaseelanNo ratings yet
- SECA1301 NotesDocument125 pagesSECA1301 NotesJais S.No ratings yet
- 18ECE302T-U2-L15 Resonance and Quality FactorDocument5 pages18ECE302T-U2-L15 Resonance and Quality Factoramitava2010No ratings yet
- Bouncy ChudinovDocument8 pagesBouncy Chudinovthefallenghost6108No ratings yet
- Lec 5Document3 pagesLec 5Atom CarbonNo ratings yet
- EE311 Exam Study Guide - Signals, Systems and FiltersDocument3 pagesEE311 Exam Study Guide - Signals, Systems and Filtersعلي بن مختارNo ratings yet
- 2324 HK1 HW 5Document4 pages2324 HK1 HW 5420h0317No ratings yet
- 2 Sample and Hold Circuits (S/H) : X (T) Sampling Instant Hold InstantDocument5 pages2 Sample and Hold Circuits (S/H) : X (T) Sampling Instant Hold InstantYassine DjillaliNo ratings yet
- 3P0 Wave Function PDFDocument30 pages3P0 Wave Function PDFMario SánchezNo ratings yet
- 1 Characteristics of Time Series 1.3 Measures of DependenceDocument10 pages1 Characteristics of Time Series 1.3 Measures of DependenceTrịnh TâmNo ratings yet
- Introduction To Maximum LikelihoodDocument18 pagesIntroduction To Maximum LikelihoodFelipe Javier Ruiz RiveraNo ratings yet
- Ece2610 Chap3Document46 pagesEce2610 Chap3jagriti kumariNo ratings yet
- Direct Integration Methods - NDocument3 pagesDirect Integration Methods - NdhineshNo ratings yet
- Discrete systemsDocument32 pagesDiscrete systemskiprotich allanNo ratings yet
- Unit-IV-Pulse Modulation & Digital Modulation Modulation: StaffDocument15 pagesUnit-IV-Pulse Modulation & Digital Modulation Modulation: StaffGokul SaharNo ratings yet
- TutorialDocument10 pagesTutorialAniket PatelNo ratings yet
- FinalsolDocument5 pagesFinalsolof30002000No ratings yet
- Adc IeeeDocument4 pagesAdc IeeeKavya Sai sriNo ratings yet
- Higher Order Derivative & Implicit DifferentiationDocument3 pagesHigher Order Derivative & Implicit DifferentiationGlymuel SalemNo ratings yet
- Signals and Systems Week 1 AssignmentDocument2 pagesSignals and Systems Week 1 AssignmentJB NavarroNo ratings yet
- Fourier Transform and Pulses LabDocument9 pagesFourier Transform and Pulses LabKthiha CnNo ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- Supplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyDocument6 pagesSupplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyMichelle Ann OrendainNo ratings yet
- UNIT3&5Document3 pagesUNIT3&5tufanialiNo ratings yet
- Math 416 Course Outline and Notes1Document46 pagesMath 416 Course Outline and Notes1Kanana kimathiNo ratings yet
- Process Control EPCH 306 Course OverviewDocument82 pagesProcess Control EPCH 306 Course OverviewDeuel De LisleNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Ect204 Signals and Systems, July 2021Document4 pagesEct204 Signals and Systems, July 2021Sourav SethuNo ratings yet
- ECE316H1 - 20201 - 641586556718ECE316 Problem Set Solutions Merged-20Document79 pagesECE316H1 - 20201 - 641586556718ECE316 Problem Set Solutions Merged-20Vama DaveNo ratings yet
- Signals and Systems exam questionsDocument3 pagesSignals and Systems exam questionsNamanNo ratings yet
- Introduction To Olecular Ynamics Simulations Using: M D LammpsDocument86 pagesIntroduction To Olecular Ynamics Simulations Using: M D Lammpskroidman100% (2)
- Phys 203 Princeton University Fall 2006 Final Exam: K R K VDocument5 pagesPhys 203 Princeton University Fall 2006 Final Exam: K R K Vmichael pasquiNo ratings yet
- EE4440 HW#1 Solution: January 20, 2011Document5 pagesEE4440 HW#1 Solution: January 20, 2011TibouNo ratings yet
- Ese562 Lect01Document35 pagesEse562 Lect01ashralph7No ratings yet
- L5 - Fourier Series (Proposed Exercises)Document3 pagesL5 - Fourier Series (Proposed Exercises)Rodrigo Andres Calderon NaranjoNo ratings yet
- 03 - Seismic Input PDFDocument31 pages03 - Seismic Input PDFHerman AucampNo ratings yet
- IGNOU Old Question PaperDocument8 pagesIGNOU Old Question PaperMohd PkNo ratings yet
- Fade Margin CalculationDocument9 pagesFade Margin CalculationMohammad Belal HossainNo ratings yet
- NetcatcshDocument12 pagesNetcatcshcyxanactaNo ratings yet
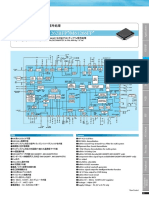
- M61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Document1 pageM61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Ageng Algavita WibowoNo ratings yet
- Avtron 3G Mobile DVR AT 04MVDDocument3 pagesAvtron 3G Mobile DVR AT 04MVDAvtron TechnologiesNo ratings yet
- 03 - 2G-3G Authentication With SIM Cards - 2003Document19 pages03 - 2G-3G Authentication With SIM Cards - 2003Chiti ChoopayakNo ratings yet
- Force10 s25n s50n FtosDocument2 pagesForce10 s25n s50n Ftosdiska767No ratings yet
- The IBODocument11 pagesThe IBOIshtiaq Ahmed100% (1)
- Nuestros Precios y Stock Pueden Variar Sin Previo AvisoDocument9 pagesNuestros Precios y Stock Pueden Variar Sin Previo AvisoWilliam JaimeNo ratings yet
- CryptoolDocument21 pagesCryptoolSidiNo ratings yet
- NVR Users Manual V1.0.5 - FrenchDocument195 pagesNVR Users Manual V1.0.5 - FrenchAziz El KhalfiNo ratings yet
- ALC269Document79 pagesALC269Gabriel ClarosNo ratings yet
- Productos Ipc 2020Document4 pagesProductos Ipc 2020Jorge TorresNo ratings yet
- Communication Systems Course OutlineDocument34 pagesCommunication Systems Course OutlineIhsan ul HaqNo ratings yet
- Commissioning and Integration LTE DUS - DULDocument5 pagesCommissioning and Integration LTE DUS - DULColour BlindNo ratings yet
- Long Range Reader - Cf-Ru5112-NDocument2 pagesLong Range Reader - Cf-Ru5112-NKrishnendu MannaNo ratings yet
- Nortel Bay Command Console (BCC) Supplement GuideDocument80 pagesNortel Bay Command Console (BCC) Supplement GuidegabegallNo ratings yet
- FM ReceiverDocument19 pagesFM ReceiverMiggy CeballoNo ratings yet
- 106-215 TX-103R TXDocument10 pages106-215 TX-103R TXAnonymous R1OHvFbj6NNo ratings yet
- CN Lab Manual Computer Networks ExperimentsDocument104 pagesCN Lab Manual Computer Networks ExperimentsRakshith0% (1)
- Acs - R15 Question Bit BankDocument20 pagesAcs - R15 Question Bit BankHariNagaRajaThotaNo ratings yet
- Adam-6224 DS20140613101142Document2 pagesAdam-6224 DS20140613101142Alex JuniorNo ratings yet
- Genset: 890 Mkii Dsewebnet Gateway 4G (Gsm/Ethernet)Document1 pageGenset: 890 Mkii Dsewebnet Gateway 4G (Gsm/Ethernet)Iuri BragaNo ratings yet
- TutorialDocument53 pagesTutorialMaxim KõitsNo ratings yet
- Manual Radio AirspanDocument74 pagesManual Radio AirspanRamon M0% (1)
- FortiGate InfrastructureDocument2 pagesFortiGate InfrastructurePrabakaran VNo ratings yet
- CH - 8 Wsjuly11Document26 pagesCH - 8 Wsjuly11Abhinav DandareNo ratings yet
- SLSU ECE09 Communications SyllabusDocument5 pagesSLSU ECE09 Communications SyllabusCyrill Kino Escolano FscNo ratings yet
- Toshiba L630 L635 Laptop SchematicDocument56 pagesToshiba L630 L635 Laptop SchematicAgus Jhon80% (5)
- Chapter9 PDFDocument2 pagesChapter9 PDFDinh Phuc BuiNo ratings yet
- Cloud Infrastructure Security at Different LaevelsDocument7 pagesCloud Infrastructure Security at Different LaevelsIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet