You might also like
- This Lesson Will Teach You To Turn On and Off Leds Using WebpageDocument24 pagesThis Lesson Will Teach You To Turn On and Off Leds Using WebpageSedrex De Veas CastilloNo ratings yet
- Speedometer_DisplayDocument2 pagesSpeedometer_Displaysaksham hisariyaNo ratings yet
- IOT IntroductionDocument23 pagesIOT IntroductionMadhuNo ratings yet
- Teste Codigo Automato ArduinoDocument15 pagesTeste Codigo Automato ArduinoCrhistian IzaguirryNo ratings yet
- Arduino Radar SystemDocument8 pagesArduino Radar SystemsharadrohiniatlNo ratings yet
- Final_speedometerDocument3 pagesFinal_speedometersaksham hisariyaNo ratings yet
- parkDocument3 pagesparkpatelansh9484No ratings yet
- Codigo Que Te FaltanDocument2 pagesCodigo Que Te Faltanmarcelo veronNo ratings yet
- Part-1 PIR Motion Sensor and Servo CodeDocument15 pagesPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNo ratings yet
- Include Include Include IncludeDocument26 pagesInclude Include Include Includegabrielapb19No ratings yet
- 2 ServoDocument2 pages2 ServoNardy Hepy100% (1)
- Code ArduinoDocument13 pagesCode ArduinoChaimae FlissiNo ratings yet
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- Arduino CodeDocument2 pagesArduino CodeBienNo ratings yet
- Arduino Mega & Trinket CodeDocument7 pagesArduino Mega & Trinket Codeapi-362315551No ratings yet
- Arduino ultrasonic sensor radar displayDocument5 pagesArduino ultrasonic sensor radar displayJorgeCastilloNo ratings yet
- Wireless simulation titleDocument5 pagesWireless simulation titleUcet TindivanamNo ratings yet
- Wireless Simulation Vanet TCLDocument5 pagesWireless Simulation Vanet TCLalione100% (1)
- CryptographyDocument30 pagesCryptographyJaishree JainNo ratings yet
- MCom (IS) - DCN LAB ProgramsDocument16 pagesMCom (IS) - DCN LAB ProgramsKV N P VARUN KUMARNo ratings yet
- Kode ArduinoDocument4 pagesKode ArduinoNurul KharizatulNo ratings yet
- Arduino Serial Communication and Home AutomationDocument15 pagesArduino Serial Communication and Home AutomationGalih Dwi100% (2)
- Network Programming Lab: Submit by Guided byDocument28 pagesNetwork Programming Lab: Submit by Guided byJámès KõstãNo ratings yet
- Arduino Sensor Code and ProcessingDocument4 pagesArduino Sensor Code and ProcessingGaVhaRiNo ratings yet
- Praktikum Sensor Dengan ServoDocument2 pagesPraktikum Sensor Dengan Servotkj smkn1dokoNo ratings yet
- Koding Telegram BotDocument7 pagesKoding Telegram BotAndi CahyoNo ratings yet
- Computer Networks LabmanualDocument30 pagesComputer Networks Labmanuallanka naveenNo ratings yet
- Last GpsDocument9 pagesLast GpsThinh HoangNo ratings yet
- CodeDocument9 pagesCodeMuHammad TaHir HasSanNo ratings yet
- Convert Optical Mouse Into Arduino Web CameraDocument8 pagesConvert Optical Mouse Into Arduino Web CameraJorge Pablo Ordemar Cisneros100% (2)
- Ns LabDocument26 pagesNs Labankuprajapati0525No ratings yet
- Rotinas de Teste em C Do Arduino Com X-Plane PDFDocument20 pagesRotinas de Teste em C Do Arduino Com X-Plane PDFNamedin Pereira TelesNo ratings yet
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSANo ratings yet
- Arduino Ultrasonic AccesDocument5 pagesArduino Ultrasonic AccesFurqon Madaz XskaMaticNo ratings yet
- Control Stepper Motor with Joystick & EasyDriverDocument3 pagesControl Stepper Motor with Joystick & EasyDriverSérgio PortuNo ratings yet
- Coding Arduino Sistem Kontrol LampuDocument5 pagesCoding Arduino Sistem Kontrol LampuBurhan udinNo ratings yet
- Ear Project Final Code ArduinoDocument3 pagesEar Project Final Code ArduinosamantharathnasiriNo ratings yet
- Computer Network LAB 5Document19 pagesComputer Network LAB 5zeeshanahmad12030No ratings yet
- PIR Motion Sensor AlarmDocument46 pagesPIR Motion Sensor AlarmSyad AlyNo ratings yet
- EE5530 Lecture17 Complete SV TestBench With SCBDocument35 pagesEE5530 Lecture17 Complete SV TestBench With SCBjithinkrishnac4474No ratings yet
- pc5Document11 pagespc5harshNo ratings yet
- Human Detection - InoDocument4 pagesHuman Detection - InoAbdNo ratings yet
- Interface RF ModuleDocument22 pagesInterface RF ModulesaranyaammuNo ratings yet
- Arduino Script Control Brushless Motor & Ultrasonic SensorDocument6 pagesArduino Script Control Brushless Motor & Ultrasonic SensorebrielNo ratings yet
- Same - Rar SAMPLEDocument9 pagesSame - Rar SAMPLERogelio FlorenciaNo ratings yet
- Program 7 To 12 CN Lab With OutputsDocument21 pagesProgram 7 To 12 CN Lab With Outputspalivelasrinu12No ratings yet
- Rajkiya Engineering College Kannauj: Practical FileDocument17 pagesRajkiya Engineering College Kannauj: Practical FilesumitNo ratings yet
- Control Remoto Con Arduino y Un FocoDocument3 pagesControl Remoto Con Arduino y Un FocoRoberto Carlos AyalaNo ratings yet
- Toaz - Info Cryptotab Script Hack 14 BTC Updated March 2020 Part PRDocument13 pagesToaz - Info Cryptotab Script Hack 14 BTC Updated March 2020 Part PRCrypto NourNo ratings yet
- Cryptotab Script Hack 14 BTC Updated March 2020 PartDocument13 pagesCryptotab Script Hack 14 BTC Updated March 2020 PartKyle Lawrence40% (25)
- O2 Analyzer - InoDocument4 pagesO2 Analyzer - InoihsanbuNo ratings yet
- Real-Time Parking Space Monitoring SystemDocument6 pagesReal-Time Parking Space Monitoring SystemsandraNo ratings yet
- Arduino - Control ESC - Motor (Arduino Code)Document7 pagesArduino - Control ESC - Motor (Arduino Code)ordenador90No ratings yet
- Socket Programming Lab Implement Client Server ModelDocument5 pagesSocket Programming Lab Implement Client Server ModelDiksha NasaNo ratings yet
- CodeDocument5 pagesCodeAbaidullah SajidNo ratings yet
- AVR EEPROM Configuration LoadingDocument11 pagesAVR EEPROM Configuration LoadingBimo Ahmad YuliarNo ratings yet
- ROBOTICS Lab ManualDocument7 pagesROBOTICS Lab Manualparidhi kaushikNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- SettingsDocument2 pagesSettingsfanNo ratings yet
- Python LicenseDocument1 pagePython LicenseRaindyHardiansyahNo ratings yet
- Ocio LicenseDocument1 pageOcio LicensepranavNo ratings yet
- LICENSE BmonofontDocument2 pagesLICENSE BmonofontJohn DoeNo ratings yet
- LICENSE-bfont TTFDocument2 pagesLICENSE-bfont TTFChristianNatanaelNo ratings yet
- LICENSE Droidsans - TTFDocument2 pagesLICENSE Droidsans - TTFRohaanVfxNo ratings yet
- Mesa Vs GDFTDocument8 pagesMesa Vs GDFTErezwaNo ratings yet
- Senarai Kelulusan Personnel TeknikalDocument2 pagesSenarai Kelulusan Personnel TeknikalNurul JannatiNo ratings yet
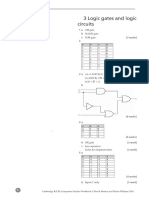
- 3 Logic Gates and Logic CircuitsDocument2 pages3 Logic Gates and Logic CircuitsMd. Samsul Arefin ShamimNo ratings yet
- nanoHUB U Lundstrom Nanotransistors L2.7Document24 pagesnanoHUB U Lundstrom Nanotransistors L2.7Iqra FarhanNo ratings yet
- ENE KB9022 On LA-A342P ZIPS3Document15 pagesENE KB9022 On LA-A342P ZIPS3Hassan FakhouryNo ratings yet
- 1.objectives:: Experiment # 2Document7 pages1.objectives:: Experiment # 2tahermohNo ratings yet
- Electrical Engineer ProfileDocument9 pagesElectrical Engineer ProfileStanindo ArthalanggengNo ratings yet
- Acoustic Emission Monitoring During Resistance Spot-WeldingDocument6 pagesAcoustic Emission Monitoring During Resistance Spot-WeldingROHITNo ratings yet
- British 18W TMB Manual 20-07-28Document28 pagesBritish 18W TMB Manual 20-07-28Fabio LimaNo ratings yet
- Medium Voltage SwitchgearDocument22 pagesMedium Voltage SwitchgearPATEL AKASHNo ratings yet
- Spesifikasi Teknis Paket Pekerjaan Elektronik Proyek Olympic Residence Sentul - BogorDocument11 pagesSpesifikasi Teknis Paket Pekerjaan Elektronik Proyek Olympic Residence Sentul - Bogorbobby budimanNo ratings yet
- Problems in PSADocument12 pagesProblems in PSArameshsme100% (1)
- Smart LED Post Top G3Document6 pagesSmart LED Post Top G3rasikh robbani sigitNo ratings yet
- Fresh graduate seeks Process/Test Engineer roleDocument3 pagesFresh graduate seeks Process/Test Engineer roleMuhd Firdaus78% (9)
- PDS7114 Iss5 ESB OFFSHORE BATTERYDocument7 pagesPDS7114 Iss5 ESB OFFSHORE BATTERYSonthi MooljindaNo ratings yet
- Ka8603 Universal Speech Network: 16-DIP-300ADocument6 pagesKa8603 Universal Speech Network: 16-DIP-300AAdnanDeğerliyurtNo ratings yet
- GL823 Design Guide - 100Document9 pagesGL823 Design Guide - 100LuizNo ratings yet
- Electrical Circuits 2: AC FundamentalsDocument23 pagesElectrical Circuits 2: AC FundamentalsMarvin GagarinNo ratings yet
- Technical Data Sheet Damper Actuator LM24A-SRDocument4 pagesTechnical Data Sheet Damper Actuator LM24A-SRJorge Morales CerónNo ratings yet
- Flowserve Digital Positioner Logix 520 MDDocument20 pagesFlowserve Digital Positioner Logix 520 MDShahnawaz SalimNo ratings yet
- Yamaha Rx-A1010 rx-v1071Document190 pagesYamaha Rx-A1010 rx-v1071Tony PhamNo ratings yet
- Sensors On 3D DigitizationDocument19 pagesSensors On 3D DigitizationRajendra KumarNo ratings yet
- NANOELECTRONICSDocument24 pagesNANOELECTRONICSvij.scribd100% (2)
- Electric Arc Furnace (EAF) Modeling Using Matlab Simulink PDFDocument9 pagesElectric Arc Furnace (EAF) Modeling Using Matlab Simulink PDFAhmed HassanNo ratings yet
- MODEL 300: DC Brushless ThrusterDocument7 pagesMODEL 300: DC Brushless Thrusterjupalspy9870No ratings yet
- Conventional Intelligent HeatSmoke Detector D C400 PDFDocument2 pagesConventional Intelligent HeatSmoke Detector D C400 PDFMeisam NabiNo ratings yet
- Neosun NS 540 550M 144 en - 2Document2 pagesNeosun NS 540 550M 144 en - 2Agus SalimNo ratings yet
- Drypro Model 793: Operation ManualDocument156 pagesDrypro Model 793: Operation Manualayo_adekoyaNo ratings yet
- Compact Multimedia Projector Service ManualDocument78 pagesCompact Multimedia Projector Service ManualagypsyNo ratings yet
- Lowongan PT Multi Spunindo Jaya Sept 2020Document5 pagesLowongan PT Multi Spunindo Jaya Sept 2020Ika DiagaNo ratings yet
- Answers All Activities Cdi Grade 12 General & AdvanceDocument23 pagesAnswers All Activities Cdi Grade 12 General & Advancemahmoud albiakNo ratings yet