You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Winning With Accountability 00Document7 pagesWinning With Accountability 00am_mail0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Wind Load Calculator For Solar (IS 875 Part 3)Document1 pageWind Load Calculator For Solar (IS 875 Part 3)JaaiBadgujarNo ratings yet
- VOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFDocument19 pagesVOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFfjjsjekdmme0% (1)
- AGC, ASA, ASC - Guidelines For A Successful Construction ProjectDocument0 pagesAGC, ASA, ASC - Guidelines For A Successful Construction Projectmote34No ratings yet
- FM Station ProposalDocument10 pagesFM Station ProposalCedric De Lara Conol100% (2)
- Protect-RCS-O&M Manual PDFDocument53 pagesProtect-RCS-O&M Manual PDFsureshnfcl0% (1)
- MUFON UFO Journal - December 1997Document24 pagesMUFON UFO Journal - December 1997Carlos RodriguezNo ratings yet
- Cross-Sectional Optimization of Cold-Formed Steel Channels-Ma2015Document11 pagesCross-Sectional Optimization of Cold-Formed Steel Channels-Ma2015JaaiBadgujarNo ratings yet
- Auto Cad 3d CommandsDocument1 pageAuto Cad 3d CommandsJaaiBadgujarNo ratings yet
- Strength and Vibration Analysis of Anti Friction Bearing DefectsDocument126 pagesStrength and Vibration Analysis of Anti Friction Bearing DefectsJaaiBadgujarNo ratings yet
- Universal Bearing Housing SpecsDocument10 pagesUniversal Bearing Housing SpecsJaaiBadgujarNo ratings yet
- Experiment On WritingDocument16 pagesExperiment On WritingEarl CalingacionNo ratings yet
- GS - RS - Lite CENTUM VP Integration PackageDocument4 pagesGS - RS - Lite CENTUM VP Integration PackageVijayNo ratings yet
- Eisi - Company & Product Profile (2022)Document29 pagesEisi - Company & Product Profile (2022)Loui BarciaNo ratings yet
- Infra-View LitDocument2 pagesInfra-View LitGavinsiauNo ratings yet
- Scope and Sequence: Let's Start With ArtDocument4 pagesScope and Sequence: Let's Start With ArtPhương MaiNo ratings yet
- Manuals Guides Brooks Microprocessor Control Read Out Unit Micro Motion en 63766 PDFDocument40 pagesManuals Guides Brooks Microprocessor Control Read Out Unit Micro Motion en 63766 PDFRodrigo GutierrezNo ratings yet
- Problem and SolutionDocument22 pagesProblem and SolutiondaRainNo ratings yet
- Engine Inspection Using Windrock Technology DiagnosticsDocument4 pagesEngine Inspection Using Windrock Technology DiagnosticsImranFazal100% (1)
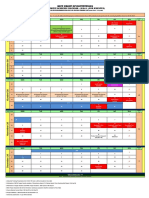
- Academic Calendar Odd Sem 2020-21Document1 pageAcademic Calendar Odd Sem 2020-21NAMRATA SHARMANo ratings yet
- Oxford Learner's Bookshelf E-Books For Learning 3Document1 pageOxford Learner's Bookshelf E-Books For Learning 3Yesenia Mendoza HernandezNo ratings yet
- Representing Sexuality and Morality in Sex Education Picture Books in Contemporary ChinaDocument21 pagesRepresenting Sexuality and Morality in Sex Education Picture Books in Contemporary ChinaBelén CabreraNo ratings yet
- Characterization of Metallized Biaxially Oriented Polypropylene FilmDocument10 pagesCharacterization of Metallized Biaxially Oriented Polypropylene FilmLaboratory Plant 7No ratings yet
- Workshop Manual: Group 30 Electrical System IDocument176 pagesWorkshop Manual: Group 30 Electrical System Irichard castañeda100% (1)
- Philippine Business For Social Progress: A Case StudyDocument52 pagesPhilippine Business For Social Progress: A Case StudySynergos InstituteNo ratings yet
- Using Engineering and Management Principles For Better Patient Care Nikhil BalakrishnanDocument345 pagesUsing Engineering and Management Principles For Better Patient Care Nikhil BalakrishnanYendy ReyesNo ratings yet
- JVC KD r540 Manual de InstruccionesDocument16 pagesJVC KD r540 Manual de InstruccionesJesus FloresNo ratings yet
- Foundatin of Engeneering 2Document16 pagesFoundatin of Engeneering 2sunshaniNo ratings yet
- Imo Signs: Safety Officer's GuideDocument60 pagesImo Signs: Safety Officer's Guidemarko nežićNo ratings yet
- Podcast ProjectDocument10 pagesPodcast Projectmiskinmusic123No ratings yet
- Starters: Grammar Unit 11Document8 pagesStarters: Grammar Unit 11andres lNo ratings yet
- International StandardDocument52 pagesInternational StandardismaelarchilacastilloNo ratings yet
- Alice in Wonderland Literary AnalysisDocument5 pagesAlice in Wonderland Literary AnalysisRica Jane Torres100% (1)
- Solidity Part 2Document103 pagesSolidity Part 2Muhammad Zahid FaridNo ratings yet
- Keenan Et Al, 2013Document5 pagesKeenan Et Al, 2013Marcela LúciaNo ratings yet