You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Tech2 Users GuideDocument301 pagesTech2 Users Guideurazapenje100% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Math Sequences & Series Grade 12Document8 pagesMath Sequences & Series Grade 12Langelihle ButheleziNo ratings yet
- Advanced Calculus WoodsDocument416 pagesAdvanced Calculus WoodsArthur HenriqueNo ratings yet
- Simplex MethodDocument16 pagesSimplex MethodShantanu Dutta100% (1)
- MWB Winter 2018 - Group 4Document3 pagesMWB Winter 2018 - Group 4Bá PhongNo ratings yet
- Math MF2 Chapter 4 (Linear Equations I)Document1 pageMath MF2 Chapter 4 (Linear Equations I)compeil80% (5)
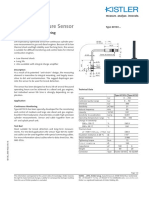
- Cylinder Pressure SensorDocument2 pagesCylinder Pressure SensorDiamante HernandezNo ratings yet
- PreviewDocument7 pagesPreviewDiamante HernandezNo ratings yet
- Reinforcement Learning Second Edition CoverDocument1 pageReinforcement Learning Second Edition CoverDiamante HernandezNo ratings yet
- GNU Linux Command Line Tools SummaryDocument101 pagesGNU Linux Command Line Tools Summaryinfobits100% (2)
- Additional Exercises for Vectors, Matrices, and Least SquaresDocument41 pagesAdditional Exercises for Vectors, Matrices, and Least SquaresAlejandro Patiño RiveraNo ratings yet
- Honda Monkey Z50JZ Z50RC BrochureDocument2 pagesHonda Monkey Z50JZ Z50RC BrochureDiamante HernandezNo ratings yet
- Honda Storm 125Document98 pagesHonda Storm 125Fredy Daniel Casallas Rocha100% (1)
- Honda Z50JZ Owners ManualDocument108 pagesHonda Z50JZ Owners ManualDiamante HernandezNo ratings yet
- z50j1 BrochureDocument3 pagesz50j1 BrochureDiamante HernandezNo ratings yet
- 1967 Honda Monkey Z50M Parts ListDocument65 pages1967 Honda Monkey Z50M Parts ListDiamante HernandezNo ratings yet
- DaedalusDocument1 pageDaedalusDiamante HernandezNo ratings yet
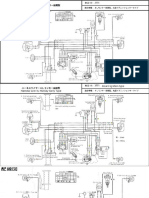
- Honda Monkey Z50J1 Wiring HarnessDocument4 pagesHonda Monkey Z50J1 Wiring HarnessDiamante Hernandez100% (1)
- 1973-1979 Honda Monkey Z50J1 Parts ListDocument67 pages1973-1979 Honda Monkey Z50J1 Parts ListDiamante HernandezNo ratings yet
- ManualDocument28 pagesManualGabriel SetnicNo ratings yet
- Hello World SampleDocument1 pageHello World Sampleabhijeetk3No ratings yet
- Sa Imports Taotao 062810Document39 pagesSa Imports Taotao 062810Diamante HernandezNo ratings yet
- IMSLP04413-Bach - BGA - BWV 598Document1 pageIMSLP04413-Bach - BGA - BWV 598Diamante HernandezNo ratings yet
- Method of Successive SubstitutionDocument3 pagesMethod of Successive Substitutiondeep_7250% (2)
- Query Processing & Optimization OverviewDocument38 pagesQuery Processing & Optimization OverviewJAYPALSINH GOHILNo ratings yet
- PPSC Mock Test 2 Akhtar AbbasDocument4 pagesPPSC Mock Test 2 Akhtar AbbasUmair AliNo ratings yet
- Review of Elasticity EquationsDocument52 pagesReview of Elasticity Equationsfoush bashaNo ratings yet
- C ProgrammingDocument9 pagesC ProgrammingShohagh Shosagh100% (2)
- MA3151 Matrices and Calculus Two Mark Questions 2Document13 pagesMA3151 Matrices and Calculus Two Mark Questions 2Yasar BilalNo ratings yet
- Limits and Indeterminate Forms WorksheetDocument8 pagesLimits and Indeterminate Forms Worksheethoney1002No ratings yet
- Sample Paper Class9 (2023-24)Document8 pagesSample Paper Class9 (2023-24)sb2swbrnhcNo ratings yet
- Supra Ir - Closed SetsDocument6 pagesSupra Ir - Closed Setsijsret100% (1)
- Algorithms (1coolDocument52 pagesAlgorithms (1coolGfdgjjgfllNo ratings yet
- Solving Polynomial Inequalities by GraphingDocument7 pagesSolving Polynomial Inequalities by Graphingtarun gehlotNo ratings yet
- Expressions and Equations Stinky Feet Review Game (Sub Plans)Document17 pagesExpressions and Equations Stinky Feet Review Game (Sub Plans)api-233623316No ratings yet
- FourierAnalysis IHS SeminarDocument45 pagesFourierAnalysis IHS SeminarKazm ShehabNo ratings yet
- Inverse Variation Explained in 40 CharactersDocument7 pagesInverse Variation Explained in 40 CharactersGary NugasNo ratings yet
- Session 3Document35 pagesSession 3Gilbert AggreyNo ratings yet
- MAT232H5F Final Exam Problem Set SolutionsDocument7 pagesMAT232H5F Final Exam Problem Set SolutionsRevownSada0% (1)
- Legend: A-Combined Loadings (2) B-Torsion (2) C-Flexural Stresses by The Assignments Solved ProblemsDocument6 pagesLegend: A-Combined Loadings (2) B-Torsion (2) C-Flexural Stresses by The Assignments Solved ProblemsMike Joeffer R. CalumnoNo ratings yet
- Material Downloaded From - 1 / 2Document2 pagesMaterial Downloaded From - 1 / 2Rezin ChNo ratings yet
- Polynomials Level 3Document17 pagesPolynomials Level 3greycouncilNo ratings yet
- ICS141: Discrete Mathematics For Computer Science IDocument26 pagesICS141: Discrete Mathematics For Computer Science IMahmoud Abdel-SalamNo ratings yet
- BCA-302 NewDocument4 pagesBCA-302 NewTapamalya SanyalNo ratings yet
- Solutions 4Document4 pagesSolutions 4Mohanarajan Mohan KumarNo ratings yet
- Linear Transformations and Their Matrices: Without Coordinates (No Matrix)Document5 pagesLinear Transformations and Their Matrices: Without Coordinates (No Matrix)Abhishek KumarNo ratings yet
- GenMath Week 5 6Document24 pagesGenMath Week 5 6Luke JessieMhar LumberioNo ratings yet