You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Chapter 9 Analysis and Design of Digital Filter: Z L Z X Z Y Z HDocument42 pagesChapter 9 Analysis and Design of Digital Filter: Z L Z X Z Y Z HRajasekhar AtlaNo ratings yet
- DT System Freq ResponseDocument54 pagesDT System Freq ResponseSAKSHI CHIKSHENo ratings yet
- Zero Locations of Linear Phase Fir Filters 3 PDFDocument4 pagesZero Locations of Linear Phase Fir Filters 3 PDFMuneeb ArshadNo ratings yet
- 3c6aac9f 108工程機率ch4作業Document2 pages3c6aac9f 108工程機率ch4作業孔令洋No ratings yet
- EE5130: Digital Signal Processing: n n n n n n n n n n n jω nDocument1 pageEE5130: Digital Signal Processing: n n n n n n n n n n n jω nSHUBHAM ANAND VERMA EE20M540No ratings yet
- Solutions To Homework Assignment #9, Math 253: F (X, Y, Z) DV As AnDocument7 pagesSolutions To Homework Assignment #9, Math 253: F (X, Y, Z) DV As AnJose D CostaNo ratings yet
- CSE - 610 Lecture # 7Document38 pagesCSE - 610 Lecture # 7zaidNo ratings yet
- Discrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazaDocument27 pagesDiscrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazadeepthiNo ratings yet
- GEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Document54 pagesGEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Benedict HounsinouNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaNo ratings yet
- 212 EEE 3310 LabSheet 04Document13 pages212 EEE 3310 LabSheet 04proddut ChakrabortyNo ratings yet
- Digital Signal ProcessingDocument9 pagesDigital Signal ProcessingMohamed shabanaNo ratings yet
- CSE - 610 Lecture # 9Document48 pagesCSE - 610 Lecture # 9zaidNo ratings yet
- Course Project 2023-2024 Group 1Document8 pagesCourse Project 2023-2024 Group 1elkjgNo ratings yet
- Ex 8 - Systems and Filters - SolutionDocument14 pagesEx 8 - Systems and Filters - SolutionyuriNo ratings yet
- Course Project 2023-2024 Group 2Document8 pagesCourse Project 2023-2024 Group 2elkjgNo ratings yet
- 9 IirDocument28 pages9 IirMekonen AberaNo ratings yet
- Lec5 Wavelets and Multiresolution AnalysisDocument55 pagesLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNo ratings yet
- Limited Depenedt Variable Models and Sample Selection CorrectionsDocument62 pagesLimited Depenedt Variable Models and Sample Selection CorrectionsAqina SoaresNo ratings yet
- Bode Plot GuideDocument15 pagesBode Plot GuideKhoirul EffendiNo ratings yet
- Artificial Neural Networks: Introduction To Computational NeuroscienceDocument42 pagesArtificial Neural Networks: Introduction To Computational NeuroscienceNAGAVARSHININo ratings yet
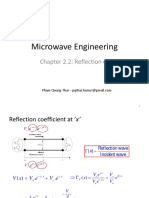
- Microwave Engineering: Chapter 2.2: Reflection CoefficientDocument14 pagesMicrowave Engineering: Chapter 2.2: Reflection CoefficientLê NamNo ratings yet
- Ch6 Z Transform2022Document29 pagesCh6 Z Transform2022Trần TânNo ratings yet
- EEE 3309 - 311 Lecture 7Document10 pagesEEE 3309 - 311 Lecture 7Mehedi HasanNo ratings yet
- F 06 ZtransfDocument6 pagesF 06 ZtransfNawal LubbadNo ratings yet
- The Simplex Method: Standard Form of LPPDocument6 pagesThe Simplex Method: Standard Form of LPPSalma BarbaraNo ratings yet
- Theory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsDocument11 pagesTheory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsKamran RaziNo ratings yet
- Rectangular Wave GuideDocument6 pagesRectangular Wave GuideKamran RaziNo ratings yet
- Beamer-Purdue: A Beamer Template Inspired by The Purdue Visual IdentityDocument8 pagesBeamer-Purdue: A Beamer Template Inspired by The Purdue Visual IdentityAhmed MuhumedNo ratings yet
- Recap I: © Matthias Liepe, 2012Document20 pagesRecap I: © Matthias Liepe, 2012KamsNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- TEM and Plane Waves (Partially A Review) : Homework: From Section 5.10 Exercises - 1, 4 (B, C, D, E), 9, 11, 12Document28 pagesTEM and Plane Waves (Partially A Review) : Homework: From Section 5.10 Exercises - 1, 4 (B, C, D, E), 9, 11, 12ruikarsachinNo ratings yet
- Lesson #2 Lecture #1 Review of Laplace TransformDocument16 pagesLesson #2 Lecture #1 Review of Laplace TransformShazidNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- Solutions To Homework 7: MT e X e DXDocument5 pagesSolutions To Homework 7: MT e X e DXPei JingNo ratings yet
- Numerical Solution of Ordinary Differential Equations: Dr. Abdul Muis, ST - Meng. Dr. Ir. Feri Yusivar MengDocument24 pagesNumerical Solution of Ordinary Differential Equations: Dr. Abdul Muis, ST - Meng. Dr. Ir. Feri Yusivar MengListiNo ratings yet
- Fixed Fixed Fixed Fixed PlateDocument8 pagesFixed Fixed Fixed Fixed Platejose alberto padillaNo ratings yet
- Ideal Filters: S X N S N yDocument26 pagesIdeal Filters: S X N S N ydanielNo ratings yet
- EC8553-DISCRETE TIME SIGNAL PROCESSING-342057679-UNIT-2 IIR DesignDocument31 pagesEC8553-DISCRETE TIME SIGNAL PROCESSING-342057679-UNIT-2 IIR Designboddam sathvikaNo ratings yet
- Transformada ZDocument17 pagesTransformada Znikika1No ratings yet
- Generating and Processing Random SignalsDocument56 pagesGenerating and Processing Random SignalssamfgNo ratings yet
- Wavelets and Filter Banks: 4C8 Integrated Systems DesignDocument41 pagesWavelets and Filter Banks: 4C8 Integrated Systems DesignShabeeb Ali OruvangaraNo ratings yet
- Cavity Resonators Lecture1Document7 pagesCavity Resonators Lecture1Kamran RaziNo ratings yet
- Fixed Free Fixed Free Plate PDFDocument7 pagesFixed Free Fixed Free Plate PDFbeenaNo ratings yet
- Lec 23-24 Euler MethodDocument36 pagesLec 23-24 Euler MethodEngineer Inside33% (3)
- Final+review Signals and SystemsDocument11 pagesFinal+review Signals and SystemsyashNo ratings yet
- Objectives:: Design of Iir FiltersDocument9 pagesObjectives:: Design of Iir FiltersItkalkarShaileshNo ratings yet
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersDocument28 pagesYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithNo ratings yet
- 7 FirDocument26 pages7 FirBala MuruganNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniNo ratings yet
- Chapter6 MG 2ppDocument13 pagesChapter6 MG 2ppMuhammet ÖzdemirNo ratings yet
- DSD 1Document8 pagesDSD 1Oday RidhaNo ratings yet
- EP 5511 - Lecture 09Document23 pagesEP 5511 - Lecture 09Solomon Tadesse AthlawNo ratings yet
- UniformDocument2 pagesUniformJaph DeeNo ratings yet
- Paper: Iit-Jam 2008Document5 pagesPaper: Iit-Jam 2008Mr MNo ratings yet
- DKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesDocument23 pagesDKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesmwangiNo ratings yet
- Lab 07 DSP: Lab # 07 Z-Transform and Inverse Z-TransformDocument15 pagesLab 07 DSP: Lab # 07 Z-Transform and Inverse Z-TransformAhsan Jamil AwanNo ratings yet
- Ch5-Dsp Design DFDocument37 pagesCh5-Dsp Design DFtrucquynhtudoanNo ratings yet
- Ideal Filters: S X N S N yDocument26 pagesIdeal Filters: S X N S N yPreethiNo ratings yet
- Ch7-D-FFT2018 (Compatibility Mode) PDFDocument42 pagesCh7-D-FFT2018 (Compatibility Mode) PDFKiên LýNo ratings yet
- Ch2-ASamplingFeb2020 (Compatibility Mode) PDFDocument40 pagesCh2-ASamplingFeb2020 (Compatibility Mode) PDFKiên LýNo ratings yet
- Ch4 Analysis LTI2020 PDFDocument33 pagesCh4 Analysis LTI2020 PDFKiên LýNo ratings yet
- Ch3 2NoishapingFeb2020 PDFDocument27 pagesCh3 2NoishapingFeb2020 PDFKiên LýNo ratings yet
- Jurnal Online Agroekoteknologi Vol.1, No.3, Juni 2013 ISSN No. 2337-6597Document11 pagesJurnal Online Agroekoteknologi Vol.1, No.3, Juni 2013 ISSN No. 2337-6597Anjar SulistyoNo ratings yet
- Lab 6Document2 pagesLab 6Mouzam AliNo ratings yet
- wst01 01 Rms 20190815Document12 pageswst01 01 Rms 20190815Newton JohnNo ratings yet
- Melds ApparatusDocument4 pagesMelds ApparatusMalik ZohaibNo ratings yet
- Statics 13esi Solutions-Manual Chapter 6Document152 pagesStatics 13esi Solutions-Manual Chapter 6Kavinesh AnanthanNo ratings yet
- ECE 6100 Project 3: Implementation of Cache Coherence ProtocolsDocument6 pagesECE 6100 Project 3: Implementation of Cache Coherence ProtocolsShantanu KotkarNo ratings yet
- Math - Q3 - Module 4 - Triangle Congruence (AutoRecovered)Document8 pagesMath - Q3 - Module 4 - Triangle Congruence (AutoRecovered)Jubie Ann EspenillaNo ratings yet
- Four Corners-East and WestDocument9 pagesFour Corners-East and WesttrelteopetNo ratings yet
- Chemical Analysis of Nickel, Cobalt, and High-Temperature AlloysDocument38 pagesChemical Analysis of Nickel, Cobalt, and High-Temperature AlloysLuigi HernándezNo ratings yet
- 第七單元 細線化與骨架抽取Document13 pages第七單元 細線化與骨架抽取bqj04343No ratings yet
- ANSYS-Based Detailed Thermo-Mechanical Modeling of Complex Thermoelectric Power DesignsDocument3 pagesANSYS-Based Detailed Thermo-Mechanical Modeling of Complex Thermoelectric Power DesignsablueleafNo ratings yet
- Penentuan Jurusan Siswa Sekolah Menengah Atas Disesuaikan Dengan Minat Siswa Menggunakan Algoritma Fuzzy C-MeansDocument12 pagesPenentuan Jurusan Siswa Sekolah Menengah Atas Disesuaikan Dengan Minat Siswa Menggunakan Algoritma Fuzzy C-Meansnovi dewi angelinaNo ratings yet
- NLB Back Pressure Valves Brochure 032613Document9 pagesNLB Back Pressure Valves Brochure 032613EquilibarNo ratings yet
- Descriptive ResearchDocument5 pagesDescriptive Researchnagire_9100% (1)
- Numerical Methods For Hyperbolic Conservation Laws: Dr. Aamer HaqueDocument27 pagesNumerical Methods For Hyperbolic Conservation Laws: Dr. Aamer HaqueIbsonhNo ratings yet
- Gek 28075Document20 pagesGek 28075leaw81No ratings yet
- O 470 Series OperatorDocument100 pagesO 470 Series OperatorFábio VieiraNo ratings yet
- Cambridge International AS & A Level: Computer Science 9608/43 October/November 2021Document19 pagesCambridge International AS & A Level: Computer Science 9608/43 October/November 2021Lavanya GoleNo ratings yet
- Lumion Animation ReportDocument27 pagesLumion Animation ReportQueen1010No ratings yet
- MSD Pro-Billet Small Diameter Chevrolet V8 Distributor: ImportantDocument8 pagesMSD Pro-Billet Small Diameter Chevrolet V8 Distributor: ImportantJorgeNo ratings yet
- Physics Practical For Class 12Document33 pagesPhysics Practical For Class 12SanjuNo ratings yet
- Analytical Chemistry: Dept. of Chemistry University of Santo TomasDocument25 pagesAnalytical Chemistry: Dept. of Chemistry University of Santo TomasRicky Justin NgoNo ratings yet
- Automata Theory TutorialDocument82 pagesAutomata Theory TutorialHeena JainNo ratings yet
- Jobmine ResumeDocument1 pageJobmine ResumeLi XuanjiNo ratings yet
- Simulation of The Central Server AlgorithmDocument11 pagesSimulation of The Central Server AlgorithmLeah RachaelNo ratings yet
- Data Sheet: Weltrend Semiconductor, IncDocument10 pagesData Sheet: Weltrend Semiconductor, IncaadNo ratings yet
- Spare Parts Manual M1Document195 pagesSpare Parts Manual M1Kamlesh Kumar Lakhwara100% (4)
- Bakery Capacity ProblemsDocument1 pageBakery Capacity ProblemsMuhammad Hamza AyoubNo ratings yet
- MotionDocument17 pagesMotionJohnNo ratings yet
- Assessment of Irrigation Water QualityDocument10 pagesAssessment of Irrigation Water Qualitymusa ballah koromaNo ratings yet