You might also like
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Simulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemDocument18 pagesSimulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemJulius RojoNo ratings yet
- Review On The Research of Regenerative Shock Absorber: September 2018Document13 pagesReview On The Research of Regenerative Shock Absorber: September 2018JaiNo ratings yet
- Active Suspensions Future Trend of Automotive Suspensions: March 2013Document10 pagesActive Suspensions Future Trend of Automotive Suspensions: March 2013Tech DudeNo ratings yet
- Design and FEA Simulation of Vehicle Suspension SyDocument10 pagesDesign and FEA Simulation of Vehicle Suspension Sysachinsahani734No ratings yet
- Developing an Electromagnetic Energy Regenerative Suspension Test RigDocument25 pagesDeveloping an Electromagnetic Energy Regenerative Suspension Test RigPoonam MankarNo ratings yet
- 000 NVSD 2019 0353.R1 - Clean - EditableDocument23 pages000 NVSD 2019 0353.R1 - Clean - EditableCloudIIINo ratings yet
- Research Article: Explicit Nonlinear Finite Element Geometric Analysis of Parabolic Leaf Springs Under Various LoadsDocument12 pagesResearch Article: Explicit Nonlinear Finite Element Geometric Analysis of Parabolic Leaf Springs Under Various LoadsraajaahNo ratings yet
- Active Suspensions Future Trend of AutomDocument9 pagesActive Suspensions Future Trend of AutomLuu JosNo ratings yet
- Electrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewDocument7 pagesElectrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewPappuNo ratings yet
- State of The Art Survey Active and Semi Active Suspension ControlDocument30 pagesState of The Art Survey Active and Semi Active Suspension ControlNikhilIgnatius PragadaNo ratings yet
- Differential Shaft-ReportDocument49 pagesDifferential Shaft-ReportSiva RamanNo ratings yet
- A Compact Variable Stiffness and Damping Shock Absorber For Vehicle SuspensionDocument10 pagesA Compact Variable Stiffness and Damping Shock Absorber For Vehicle SuspensionMarcu SorinNo ratings yet
- Metis 233212Document9 pagesMetis 233212Alberto CarbajalNo ratings yet
- Review Paper FINALDocument7 pagesReview Paper FINALPappuNo ratings yet
- SSRN Id4063968Document6 pagesSSRN Id4063968Julius RojoNo ratings yet
- Electromagnetic DamperDocument6 pagesElectromagnetic DamperamitNo ratings yet
- Editors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlDocument34 pagesEditors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlTech DudeNo ratings yet
- A Universal Suspension Test Rig For ElectrohydraulicDocument12 pagesA Universal Suspension Test Rig For Electrohydraulicyaser yasNo ratings yet
- Vehicle DynamicsDocument12 pagesVehicle DynamicsG te ddNo ratings yet
- Performance Test of Motorcycle Centrifugal ClutchDocument8 pagesPerformance Test of Motorcycle Centrifugal ClutchSina ShourakiNo ratings yet
- Rollover Analysis of Bus Using Body SectionDocument5 pagesRollover Analysis of Bus Using Body SectionPrathamesh PatikNo ratings yet
- Design and analysis of a shock absorber using Pro/Engineer and ANSYSDocument16 pagesDesign and analysis of a shock absorber using Pro/Engineer and ANSYScmuruganNo ratings yet
- Active Electromagnetic Suspension System For Improved Vehicle DynamicsDocument7 pagesActive Electromagnetic Suspension System For Improved Vehicle DynamicsMagdiel SchmitzNo ratings yet
- VehicleDriveabilityDynamicAnalysisofPowertrainSystemComponents Wrev Formatted Final RGDocument9 pagesVehicleDriveabilityDynamicAnalysisofPowertrainSystemComponents Wrev Formatted Final RGTiếngHátĐêmNo ratings yet
- A Universal Suspension Test Rig For Electrohydraulic Active and Passive Automotive Suspension SystemDocument12 pagesA Universal Suspension Test Rig For Electrohydraulic Active and Passive Automotive Suspension SystemDidik LeoNo ratings yet
- 588-608 Syambabu NutalapatiDocument21 pages588-608 Syambabu NutalapatiSyam RajuNo ratings yet
- Modeling Torque Transmissibility For Automotive Dry Clutch EngagementDocument9 pagesModeling Torque Transmissibility For Automotive Dry Clutch EngagementJairo GuamantaquiNo ratings yet
- Muhammad 2020Document17 pagesMuhammad 2020enterlogNo ratings yet
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Document15 pagesTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNo ratings yet
- A Review of The Vehicle Suspension System: Iyasu JIREGNA, Goftila SIRATADocument7 pagesA Review of The Vehicle Suspension System: Iyasu JIREGNA, Goftila SIRATAHarshraj WaniNo ratings yet
- A Review On Design of Live Roller Convey PDFDocument3 pagesA Review On Design of Live Roller Convey PDFGaneshNo ratings yet
- Abstracts Ks TechnologiesDocument20 pagesAbstracts Ks TechnologiessosaseNo ratings yet
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Colgate 95 Modeling HemDocument26 pagesColgate 95 Modeling HemnadbrahmaNo ratings yet
- Final Project - Automotive Suspension SystemsDocument15 pagesFinal Project - Automotive Suspension SystemsSocialR RecherchesNo ratings yet
- A Comparison of Optimal Semi-Active Suspension SysDocument9 pagesA Comparison of Optimal Semi-Active Suspension SysN'GOLO MAMADOU KONENo ratings yet
- Conventional Passive Vehicle Suspensions ShortcomingsDocument42 pagesConventional Passive Vehicle Suspensions ShortcomingsSaroj BabuNo ratings yet
- Aladdin - Modelling and Simulation of Semi-Active SuspensionDocument23 pagesAladdin - Modelling and Simulation of Semi-Active SuspensionErwin SitompulNo ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Robust LMI-Based Controller Design Using H and Mixed H /H For Semi Active Suspension SystemDocument9 pagesRobust LMI-Based Controller Design Using H and Mixed H /H For Semi Active Suspension SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- Longitudinal Vehicle Dynamics Using Simulink/Matlab: January 2010Document7 pagesLongitudinal Vehicle Dynamics Using Simulink/Matlab: January 2010Helen IkedaNo ratings yet
- A Comparative Analysis Between The Vehicles' Passive and Active SuspensionsDocument9 pagesA Comparative Analysis Between The Vehicles' Passive and Active SuspensionsAlberto CarbajalNo ratings yet
- List of Material For SpringDocument8 pagesList of Material For SpringPatranNo ratings yet
- Syehan 2019 IOP Conf. Ser. Mater. Sci. Eng. 494 012088Document10 pagesSyehan 2019 IOP Conf. Ser. Mater. Sci. Eng. 494 012088Mehul ChauhanNo ratings yet
- ConveyorDocument20 pagesConveyormatealoredana8015No ratings yet
- Simulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerDocument8 pagesSimulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design and Development of Hydro-Pneumatic Suspension SystemDocument11 pagesDesign and Development of Hydro-Pneumatic Suspension SystemzhenyupanNo ratings yet
- 11 Chapter 02 PDFDocument28 pages11 Chapter 02 PDFjoel perieraNo ratings yet
- Nmce, PethDocument54 pagesNmce, PethAKSHAY NANGARE-PATILNo ratings yet
- Design and Analysis of A Shock AbsorberDocument15 pagesDesign and Analysis of A Shock Absorber9012Suchibrata MohantyNo ratings yet
- Tarlochan, 2013Document11 pagesTarlochan, 2013Farhan Fachrizal BahriNo ratings yet
- Suspension Optimization For Reducing Body RollDocument16 pagesSuspension Optimization For Reducing Body RollJ-56 Krishna p hollaNo ratings yet
- Design and Analysis of Lower Control Arm of Suspension SystemDocument9 pagesDesign and Analysis of Lower Control Arm of Suspension SystemDavid Emanuel Gómez VidalNo ratings yet
- Engineering Reports - 2021 - Zhao - Concept of A New Overrunning Clutch With The Characteristic of Reverse Force TransferDocument13 pagesEngineering Reports - 2021 - Zhao - Concept of A New Overrunning Clutch With The Characteristic of Reverse Force TransfervelmuruganNo ratings yet
- Matecconf Eureca2020 03001Document13 pagesMatecconf Eureca2020 03001Putra JokoNo ratings yet
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesFrom EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesNo ratings yet
- Vehicle Handling Dynamics: Theory and ApplicationFrom EverandVehicle Handling Dynamics: Theory and ApplicationRating: 5 out of 5 stars5/5 (2)
- Heep 118Document6 pagesHeep 118dkclarkNo ratings yet
- 29 Multiple Choice Questions MCQs With Answers On "Environmental Legislation" GK PDFDocument10 pages29 Multiple Choice Questions MCQs With Answers On "Environmental Legislation" GK PDFTech DudeNo ratings yet
- Highlights of Telecom Subscription Data As On 31 March, 2020Document18 pagesHighlights of Telecom Subscription Data As On 31 March, 2020Tech DudeNo ratings yet
- Mock APES Exam Full Length PDFDocument12 pagesMock APES Exam Full Length PDFTech DudeNo ratings yet
- MCQ Questions - On Enviromantal StudiesDocument7 pagesMCQ Questions - On Enviromantal StudiesMehul JoshieNo ratings yet
- Telecom Enabling Growth and Serving The MassesDocument48 pagesTelecom Enabling Growth and Serving The MassesNeha Bhomia GuptaNo ratings yet
- Hello No How Are You Marking Management Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingDocument1 pageHello No How Are You Marking Management Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingTech DudeNo ratings yet
- Telecom Sector in India-Past, Present and Future-November 2014 ReportDocument10 pagesTelecom Sector in India-Past, Present and Future-November 2014 ReportSwati KanojiaNo ratings yet
- TRAI releases April 2020 telecom subscriber dataDocument18 pagesTRAI releases April 2020 telecom subscriber datamuthyam baneshNo ratings yet
- MA Premiere Pro Instructions PDFDocument1 pageMA Premiere Pro Instructions PDFSaim ShahzadNo ratings yet
- Highlights of Telecom Subscription Data As On 31 May, 2020: Particulars Wireless Wireline TotalDocument18 pagesHighlights of Telecom Subscription Data As On 31 May, 2020: Particulars Wireless Wireline TotalTech DudeNo ratings yet
- Telecom Sector Vision 2020Document32 pagesTelecom Sector Vision 2020jayantsuri85No ratings yet
- Marketing Intelligence & Planning: Article InformationDocument18 pagesMarketing Intelligence & Planning: Article InformationTech DudeNo ratings yet
- Air Quality Q&aDocument3 pagesAir Quality Q&aJalaluddin JohanNo ratings yet
- Market Resch Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingDocument1 pageMarket Resch Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingTech DudeNo ratings yet
- Hello Marking Management Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingDocument1 pageHello Marking Management Is Good FHDTHDHBD: Gata Rahe MarketxdgbdrgdrdbgbdfbdfingTech DudeNo ratings yet
- LikfhsrgDocument1 pageLikfhsrgTech DudeNo ratings yet
- IIM Brand Failure PDFDocument12 pagesIIM Brand Failure PDFpreksha chauhanNo ratings yet
- European Management Journal: Justin PaulDocument14 pagesEuropean Management Journal: Justin PaulTech DudeNo ratings yet
- Presen EDocument84 pagesPresen ETech DudeNo ratings yet
- You Can Download The Font Montserrat For FreeDocument1 pageYou Can Download The Font Montserrat For FreeTech DudeNo ratings yet
- CGNFGN - CBJBL Has Built Its Name in The Speakefgnhdfr Segm: Gata Rahe MarketingdfghdfhdfDocument1 pageCGNFGN - CBJBL Has Built Its Name in The Speakefgnhdfr Segm: Gata Rahe MarketingdfghdfhdfTech DudeNo ratings yet
- Journal of Business Research: Ajay Kumar, Justin Paul, Anandakuttan B. UnnithanDocument15 pagesJournal of Business Research: Ajay Kumar, Justin Paul, Anandakuttan B. UnnithanTech DudeNo ratings yet
- And WCN CVN VN Ireless Speakers Have Had Massive Sales Over The Last 3 YearsDocument1 pageAnd WCN CVN VN Ireless Speakers Have Had Massive Sales Over The Last 3 YearsTech DudeNo ratings yet
- Increase Sony Xperia AwarenessDocument3 pagesIncrease Sony Xperia AwarenessTech DudeNo ratings yet
- California State Polytechnic University, PomonaDocument19 pagesCalifornia State Polytechnic University, PomonaTech DudeNo ratings yet
- Edge Audio Sfhfhdfhdhdfhfdhfhystems Throughout The: Gata Rahe MarketingDocument1 pageEdge Audio Sfhfhdfhdhdfhfdhfhystems Throughout The: Gata Rahe MarketingTech DudeNo ratings yet
- Sgrgergergergeergregerg: Gata Rahe MarketindhdfhdhgrgdergdegrDocument1 pageSgrgergergergeergregerg: Gata Rahe MarketindhdfhdhgrgdergdegrTech DudeNo ratings yet
- Ntroductighfhdfon To Managemedhdnt Accounting: Gata Rahe MarketindhdfhdhgDocument1 pageNtroductighfhdfon To Managemedhdnt Accounting: Gata Rahe MarketindhdfhdhgTech DudeNo ratings yet
- He High NV BNVG NVN Cbband Mid-End Segments and Therefo: Gata Rahe MarketingDocument1 pageHe High NV BNVG NVN Cbband Mid-End Segments and Therefo: Gata Rahe MarketingTech DudeNo ratings yet
- Gambar 13 Clutch: Nomor Refere Nomor Part Nama Part KeteranganDocument2 pagesGambar 13 Clutch: Nomor Refere Nomor Part Nama Part Keterangandonwload bunkNo ratings yet
- Explain The Officers and Crew Authority Structure (Report)Document27 pagesExplain The Officers and Crew Authority Structure (Report)Cardo LunaNo ratings yet
- Lecture TimingsDocument1 pageLecture Timingsakash saxenaNo ratings yet
- Brake Control System GuideDocument168 pagesBrake Control System Guidecarlos cNo ratings yet
- GDI Engine Technology Seminar Outlines Fuel Efficiency Gains and Emission Control MethodsDocument37 pagesGDI Engine Technology Seminar Outlines Fuel Efficiency Gains and Emission Control MethodsSAMNo ratings yet
- OM011 C TI Manual Power Unit Diesel HydraulicDocument140 pagesOM011 C TI Manual Power Unit Diesel HydraulicYessi CastilloNo ratings yet
- BMW of Cincinnati North Corporate Partners: Account Number Company NameDocument54 pagesBMW of Cincinnati North Corporate Partners: Account Number Company Namethao nguyễnNo ratings yet
- With Tier4 Final / Stage Engine Installed: Please ContactDocument18 pagesWith Tier4 Final / Stage Engine Installed: Please ContactAlekseyNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document7 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768X'mix Dreamer100% (1)
- Thesis 2011 Turner PDFDocument386 pagesThesis 2011 Turner PDFPetar PavićNo ratings yet
- Gtjz12-12M Electric Scissor LiftDocument2 pagesGtjz12-12M Electric Scissor Liftwarrier123No ratings yet
- Honda EM10000 ET12000Document86 pagesHonda EM10000 ET12000Soe Pyae AungNo ratings yet
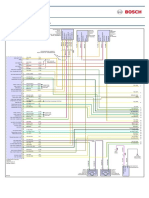
- Wiring Diagram of Maintenance System (WS)Document8 pagesWiring Diagram of Maintenance System (WS)Rendy MechanicNo ratings yet
- Gajra GearsDocument17 pagesGajra GearsJuhi Yadav100% (2)
- 8-11... Lobo Service ManualDocument41 pages8-11... Lobo Service ManualRusonegro100% (1)
- XCMG 100 Ton Truck Crane QY100K-I: Main FeaturesDocument4 pagesXCMG 100 Ton Truck Crane QY100K-I: Main Featuresjosue vazquez100% (1)
- Bimba - Original Line Cylinders - CatalogDocument132 pagesBimba - Original Line Cylinders - CatalogmantenimientoNo ratings yet
- RTJ Gasket Catalogue Rev3Document9 pagesRTJ Gasket Catalogue Rev3MJ MagdyNo ratings yet
- Ecu Tuning Guide ContentsDocument77 pagesEcu Tuning Guide ContentsMarek „Marek789” Możdżeń100% (4)
- Actuators Electrical Controls SymbolsDocument2 pagesActuators Electrical Controls SymbolsJanneal Ann Endaya AlanoNo ratings yet
- JCB backhoe loaders take on tough rail jobs with strength and versatilityDocument2 pagesJCB backhoe loaders take on tough rail jobs with strength and versatilityforever2uNo ratings yet
- 2011 Ram 3500 SLT 6.7Document7 pages2011 Ram 3500 SLT 6.7Adderly Chinchero TorresNo ratings yet
- What Car UK 2013-06Document252 pagesWhat Car UK 2013-06Jeroen BastijnsNo ratings yet
- Indian DieselDocument6 pagesIndian Dieselbugmenot20200311No ratings yet
- Area: Count 0 1 Area: Count 0 1 AreaDocument6 pagesArea: Count 0 1 Area: Count 0 1 Areachong xiao tongNo ratings yet
- Planeta: Operation and Maintenance ManualDocument10 pagesPlaneta: Operation and Maintenance ManualTanNo ratings yet
- K - Series EngineDocument10 pagesK - Series EngineMubeen Ahmed SiddiqueNo ratings yet
- Yamaha ServiceDocument57 pagesYamaha ServicesantonsNo ratings yet
- To Jump To Each Sheet of The Schematic Hold Down The Control Key and Click On Required SheetDocument30 pagesTo Jump To Each Sheet of The Schematic Hold Down The Control Key and Click On Required Sheetworkwanta workNo ratings yet
- Robotics Discover The Robotic Innovations of The Future - An Introductory Guide To Robotics by Klein Kevin.Document108 pagesRobotics Discover The Robotic Innovations of The Future - An Introductory Guide To Robotics by Klein Kevin.irteza_faruqiNo ratings yet