You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- How To Design An R Resistor For A Vishay Trench PT IGBT: RectifiersDocument12 pagesHow To Design An R Resistor For A Vishay Trench PT IGBT: RectifiersHoangNo ratings yet
- PAQ20D PAQ30D: PAL901 Paq20G Paq20S Paq30G Paq30SDocument13 pagesPAQ20D PAQ30D: PAL901 Paq20G Paq20S Paq30G Paq30SHoangNo ratings yet
- Effect of Modulation Index of Pulse Width Modulation Inverter On Total Harmonic Distortion For SinusoidalDocument6 pagesEffect of Modulation Index of Pulse Width Modulation Inverter On Total Harmonic Distortion For SinusoidalHoangNo ratings yet
- Isolated Power SupplyDocument20 pagesIsolated Power SupplyHoangNo ratings yet
- Ir 2184Document24 pagesIr 2184buiphuoclaiNo ratings yet
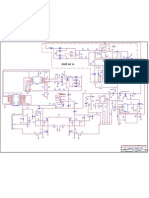
- Santak Tg500 SchematicDocument1 pageSantak Tg500 Schematictestlass100% (1)
- D882 PDFDocument4 pagesD882 PDFHoangNo ratings yet
- Transformer Design With Ferrite S 2013Document1 pageTransformer Design With Ferrite S 2013Hoang100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Study of Programmable Logic Controller (Simatic S7-200 in Paper Mill)Document55 pagesStudy of Programmable Logic Controller (Simatic S7-200 in Paper Mill)b_sravaniprasadNo ratings yet
- Metodos de Reparacion Mindray DC-6Document24 pagesMetodos de Reparacion Mindray DC-6Khalil IssaadNo ratings yet
- Design Elements and PrinciplesDocument38 pagesDesign Elements and PrinciplesPragya ChattreeNo ratings yet
- Sa 226Document4 pagesSa 226Raju SkNo ratings yet
- Matching 50Ω to 75ΩDocument7 pagesMatching 50Ω to 75Ωjoyce_caracasNo ratings yet
- 2bv5161 Vac Ej Ie1 enDocument3 pages2bv5161 Vac Ej Ie1 enEGANo ratings yet
- Argon Helium MixesDocument13 pagesArgon Helium MixessalcabesNo ratings yet
- Cs433 Sp12 Midterm SolDocument9 pagesCs433 Sp12 Midterm SolSwatiMeenaNo ratings yet
- Mis For Ntuc IncomeDocument26 pagesMis For Ntuc IncomeanthonyNo ratings yet
- Automatic Voltage Regulator: C A Pa C I T Y: 1 0 0 0 Va - 5 0 0 0 VaDocument12 pagesAutomatic Voltage Regulator: C A Pa C I T Y: 1 0 0 0 Va - 5 0 0 0 VaNihar RoyNo ratings yet
- Rock Cutting: 12.4 Design and Construction of Hill RoadsDocument13 pagesRock Cutting: 12.4 Design and Construction of Hill RoadsAnkan RakshitNo ratings yet
- Sapphire 2 GBDocument2 pagesSapphire 2 GBjuanNo ratings yet
- ISO 19115 MD-Metadata PDFDocument248 pagesISO 19115 MD-Metadata PDFarieftomNo ratings yet
- Operational Manual: Pistol Fort - 28 Caliber 5.7x28 MMDocument8 pagesOperational Manual: Pistol Fort - 28 Caliber 5.7x28 MMluca ardenziNo ratings yet
- Mecedes Benz 722.3 & 722.4 Automatic Transmission Service ManualDocument12 pagesMecedes Benz 722.3 & 722.4 Automatic Transmission Service ManualKapal-kapalan100% (4)
- SEMPDocument29 pagesSEMPMustafa ArifNo ratings yet
- Cover Conductor ReportDocument73 pagesCover Conductor ReportCarlosNo ratings yet
- Building Approval FoundationsDocument10 pagesBuilding Approval Foundationsxaekne100% (1)
- Arcadis Insights Mar 2019 - DFMADocument5 pagesArcadis Insights Mar 2019 - DFMAGiang LamNo ratings yet
- SA 516 Gr. 70Document3 pagesSA 516 Gr. 70GANESHNo ratings yet
- S12R Pta PDFDocument48 pagesS12R Pta PDFAbebe kebede75% (4)
- Axial Flux PMBLDC Motor DesignDocument8 pagesAxial Flux PMBLDC Motor DesignAvi GuptaNo ratings yet
- Design of Engineering Materials: Stress-Strain DiagramDocument32 pagesDesign of Engineering Materials: Stress-Strain DiagramTRNADEWNo ratings yet
- Factory Audit Sample ReportDocument20 pagesFactory Audit Sample Reportkaveh-bahiraee100% (1)
- Wave Notes 4 - Refraction1Document5 pagesWave Notes 4 - Refraction1Syed Mairaj Ul HaqNo ratings yet
- Blue StarDocument41 pagesBlue Starm kh50% (2)
- Hydro Jetting and Sludge RemovalDocument18 pagesHydro Jetting and Sludge Removalmarvin100% (1)
- Earth Integrity MonitorDocument2 pagesEarth Integrity MonitorAmy PriceNo ratings yet
- The Wilkinson Power Divider 723Document3 pagesThe Wilkinson Power Divider 723tugasutomoNo ratings yet
- Division Office ComplexDocument221 pagesDivision Office ComplexAnonymous ghNUgC1100% (1)