You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Alsabbagh, Marwan - MicroPython Cookbook - Over 110 Practical Recipes For Programming Embedded Systems and Microcontrollers With Python-Packt Publishing, Limited (2019) PDFDocument946 pagesAlsabbagh, Marwan - MicroPython Cookbook - Over 110 Practical Recipes For Programming Embedded Systems and Microcontrollers With Python-Packt Publishing, Limited (2019) PDFaletstroz100% (3)
- M0000518 SiaxED Ing v2.7Document150 pagesM0000518 SiaxED Ing v2.7mohamed50% (2)
- Is 1077 Common Burnt Clay Building BricksDocument7 pagesIs 1077 Common Burnt Clay Building BricksKathiravan ManimegalaiNo ratings yet
- KOMPONEN - HD785-7 SippDocument23 pagesKOMPONEN - HD785-7 Sippziky dun100% (1)
- Script Freebitco - in Strategy Calculator 2020Document5 pagesScript Freebitco - in Strategy Calculator 2020Netflix movies Watch and Download freeNo ratings yet
- 15 2 18 Osinuga PDFDocument8 pages15 2 18 Osinuga PDFImportadora Boliviana de MedicamentosNo ratings yet
- 6 New RapDocument4 pages6 New RapImportadora Boliviana de MedicamentosNo ratings yet
- Waziri PDFDocument15 pagesWaziri PDFImportadora Boliviana de MedicamentosNo ratings yet
- Some Third-Order Modifications of Newton's Method: Bijan Rahimi, Behzad Ghanbari and Mehdi Gholami PorshokouhiDocument8 pagesSome Third-Order Modifications of Newton's Method: Bijan Rahimi, Behzad Ghanbari and Mehdi Gholami PorshokouhiImportadora Boliviana de MedicamentosNo ratings yet
- Abstract:: Bol. Soc. Paran. Mat. (3s.) v. 00 0 (0000) : ??-??. C SPM - ISSN-2175-1188 On Line ISSN-00378712 in Press SPMDocument13 pagesAbstract:: Bol. Soc. Paran. Mat. (3s.) v. 00 0 (0000) : ??-??. C SPM - ISSN-2175-1188 On Line ISSN-00378712 in Press SPMImportadora Boliviana de MedicamentosNo ratings yet
- On The Use Non-Stationary Penalty Functions T o Solve Nonlinear Constrained Optimization Problems With GA'sDocument6 pagesOn The Use Non-Stationary Penalty Functions T o Solve Nonlinear Constrained Optimization Problems With GA'sImportadora Boliviana de MedicamentosNo ratings yet
- A Six-Order Variant of Newton's Method For Solving Nonlinear EquationsDocument9 pagesA Six-Order Variant of Newton's Method For Solving Nonlinear EquationsImportadora Boliviana de MedicamentosNo ratings yet
- An Algorithm For Solving Non-Linear Equations Based On The Secant MethodDocument7 pagesAn Algorithm For Solving Non-Linear Equations Based On The Secant MethodImportadora Boliviana de MedicamentosNo ratings yet
- 6 Ord NRDocument6 pages6 Ord NRImportadora Boliviana de MedicamentosNo ratings yet
- D. C. Sorensen: SIAM Journal On Numerical Analysis, Vol. 19, No. 2. (Apr., 1982), Pp. 409-426Document20 pagesD. C. Sorensen: SIAM Journal On Numerical Analysis, Vol. 19, No. 2. (Apr., 1982), Pp. 409-426Importadora Boliviana de MedicamentosNo ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2014, 85-94Document10 pagesInternational Journal of Pure and Applied Mathematics No. 1 2014, 85-94Importadora Boliviana de MedicamentosNo ratings yet
- Two Step Iterative Method For Finding Root of A Nonlinear EquationDocument12 pagesTwo Step Iterative Method For Finding Root of A Nonlinear EquationImportadora Boliviana de MedicamentosNo ratings yet
- Variational Iteration Technique and Some Methods For The Approximate Solution of Nonlinear EquationsDocument9 pagesVariational Iteration Technique and Some Methods For The Approximate Solution of Nonlinear EquationsImportadora Boliviana de MedicamentosNo ratings yet
- 3 Ord NR KingDocument7 pages3 Ord NR KingImportadora Boliviana de MedicamentosNo ratings yet
- Linear OrganizationDocument30 pagesLinear OrganizationNikhila SomankoppaNo ratings yet
- Criminology The Essentials 3rd Edition Walsh Test Bank DownloadDocument35 pagesCriminology The Essentials 3rd Edition Walsh Test Bank DownloadJohn Adamson100% (26)
- (D&D 4.0) Manual of The Planes-10Document1 page(D&D 4.0) Manual of The Planes-10Bo SunNo ratings yet
- The Evolution of Glass Façades - Aleksander T. ŚwiątekDocument10 pagesThe Evolution of Glass Façades - Aleksander T. ŚwiątekAlexSaszaNo ratings yet
- Class 9 Annual Syllabus UpdatedDocument3 pagesClass 9 Annual Syllabus UpdatedyashikaforrealNo ratings yet
- Pega Doument 1690469041Document138 pagesPega Doument 1690469041johnchandankumarNo ratings yet
- Midterm ExaminationDocument73 pagesMidterm ExaminationDoulat PanahNo ratings yet
- Gap Model of Service Quality PDFDocument19 pagesGap Model of Service Quality PDFDhiraj AhujaNo ratings yet
- Ankita P 1Document6 pagesAnkita P 1PowerPoint GoNo ratings yet
- Ui StickyDocument4 pagesUi Stickyox5tqgNo ratings yet
- Brosur Energi Dan WWTPDocument2 pagesBrosur Energi Dan WWTPfitriNo ratings yet
- Review For The Midterm Ii Test Listening Task 1 (TC U7)Document21 pagesReview For The Midterm Ii Test Listening Task 1 (TC U7)Đức Tuấn PhạmNo ratings yet
- PS TablesDocument9 pagesPS TablesRohit ShirdhankarNo ratings yet
- The New Companies Act (Chapter 24 - 31) Impact On Corporate Governance - Honey and BlanckenbergDocument5 pagesThe New Companies Act (Chapter 24 - 31) Impact On Corporate Governance - Honey and BlanckenbergLuke MadzikotoNo ratings yet
- A Statement Showing AssetsDocument2 pagesA Statement Showing AssetsNeha jainNo ratings yet
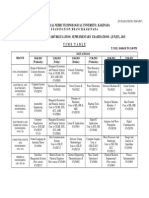
- Jawaharlal Nehru Technological University:: KakinadaDocument6 pagesJawaharlal Nehru Technological University:: KakinadaSai Ranganath BNo ratings yet
- J750 Basic Training Module1 J750 Tester OverviewDocument78 pagesJ750 Basic Training Module1 J750 Tester OverviewyohhongNo ratings yet
- Department of Labor: 05 097Document8 pagesDepartment of Labor: 05 097USA_DepartmentOfLaborNo ratings yet
- Medical Technologist Career JournalDocument3 pagesMedical Technologist Career Journalapi-262497770No ratings yet
- Zhob Adda ProjectDocument32 pagesZhob Adda ProjectKalim UllahNo ratings yet
- MV DiscovererDocument2 pagesMV DiscovererselleriverketNo ratings yet
- DAA Unit Wise Important QDocument2 pagesDAA Unit Wise Important QMUSHAM HARI KIRAN6737No ratings yet
- Write Your Answers Here:: Section 2. PhoneticsDocument10 pagesWrite Your Answers Here:: Section 2. PhoneticsKim Chi TrầnNo ratings yet
- Resume SampleDocument1 pageResume SampleAnukrit AnilNo ratings yet
- Troubleshooting Unified CommunicationDocument176 pagesTroubleshooting Unified Communicationmky212No ratings yet