You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- JmhurstDocument42 pagesJmhurstmehmetonb100% (6)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Robust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDocument6 pagesRobust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDivine Grace BurmalNo ratings yet
- ANSYS Contact GuideDocument152 pagesANSYS Contact GuideHelena AzevedoNo ratings yet
- Assisting Students Struggling in Math and Science PDFDocument239 pagesAssisting Students Struggling in Math and Science PDFNITINNo ratings yet
- Third Periodical Test in Math 5Document8 pagesThird Periodical Test in Math 5Fatima RosalNo ratings yet
- Allen Bradley's PLC Programming HandbookDocument75 pagesAllen Bradley's PLC Programming HandbooksamiaNo ratings yet
- Apex - Soql PDFDocument3 pagesApex - Soql PDFkiranNo ratings yet
- GravityDocument2 pagesGravityDivine Grace BurmalNo ratings yet
- Negotin 682 Reviewer Digests 2Document51 pagesNegotin 682 Reviewer Digests 2Divine Grace BurmalNo ratings yet
- A Comprehensive Examination of Naturalistic Lane-ChangesDocument236 pagesA Comprehensive Examination of Naturalistic Lane-ChangesDivine Grace BurmalNo ratings yet
- Astro Electronics Corp. & Peter Roxas V. Philippine Export and Foreign Loan Guarantee Corporation G.R. No. 136729 September 23, 2003Document1 pageAstro Electronics Corp. & Peter Roxas V. Philippine Export and Foreign Loan Guarantee Corporation G.R. No. 136729 September 23, 2003Divine Grace BurmalNo ratings yet
- RESPONSE TIME - Definition in The Cambridge English DictionaryDocument7 pagesRESPONSE TIME - Definition in The Cambridge English DictionaryDivine Grace BurmalNo ratings yet
- RAM, ROM, and Flash Memory - DummiesDocument2 pagesRAM, ROM, and Flash Memory - DummiesDivine Grace BurmalNo ratings yet
- J2802 - Blind Spot Monitoring System (BSMS) - Operating Characteristics and User Interface - SAE InternationalDocument1 pageJ2802 - Blind Spot Monitoring System (BSMS) - Operating Characteristics and User Interface - SAE InternationalDivine Grace BurmalNo ratings yet
- ISO 17387 - 2008 (En), Intelligent Transport SystemsDocument1 pageISO 17387 - 2008 (En), Intelligent Transport SystemsDivine Grace BurmalNo ratings yet
- Automatic Motorcycle Detection On Public Roads PDFDocument9 pagesAutomatic Motorcycle Detection On Public Roads PDFDivine Grace BurmalNo ratings yet
- 2.3 Differentiable Functions 12ppDocument12 pages2.3 Differentiable Functions 12ppDumitru D. DRAGHIANo ratings yet
- NCSC TG 009Document122 pagesNCSC TG 009bromlantNo ratings yet
- CST 8110 Quiz AnswersDocument8 pagesCST 8110 Quiz AnswershenNo ratings yet
- GATE 2014 Syllabus Civil Engineering CE - Careers360 PDFDocument3 pagesGATE 2014 Syllabus Civil Engineering CE - Careers360 PDFRahul M PerumbrayilNo ratings yet
- 2-1 Core Objects, Variables, Input, and OutputDocument28 pages2-1 Core Objects, Variables, Input, and OutputjdskkNo ratings yet
- 15 Instrumental VariablesDocument27 pages15 Instrumental VariablesDavid AyalaNo ratings yet
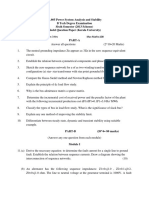
- 13.605 Power System Analysis and Stability B Tech Degree Examination Sixth Semester (2013 Scheme) Model Question Paper (Kerala University)Document4 pages13.605 Power System Analysis and Stability B Tech Degree Examination Sixth Semester (2013 Scheme) Model Question Paper (Kerala University)Abhiram DonNo ratings yet
- WINHEX ManualDocument221 pagesWINHEX ManualGilberto Zamudio100% (1)
- Unit 1 - Power System Operation and ControlDocument21 pagesUnit 1 - Power System Operation and ControlSilas StephenNo ratings yet
- Mmos Quiz Rules and Regulations: Click Here To Login and Start The QuizDocument7 pagesMmos Quiz Rules and Regulations: Click Here To Login and Start The QuizDoddy FeryantoNo ratings yet
- Mepdg 2004 PDFDocument219 pagesMepdg 2004 PDFSri RamyaNo ratings yet
- Distribution Tables: Standard Normal (Z) TableDocument13 pagesDistribution Tables: Standard Normal (Z) TableYeNti Bastaman KusumadewaNo ratings yet
- FM Textbook Solutions Chapter 3 Second Edition PDFDocument15 pagesFM Textbook Solutions Chapter 3 Second Edition PDFlibredescarga0% (1)
- 4th Feb 2020Document20 pages4th Feb 2020Kumar SatyamNo ratings yet
- Programming With C++ - Lecture5Document15 pagesProgramming With C++ - Lecture5Abdul baseerNo ratings yet
- Commutator Subgroup PDFDocument2 pagesCommutator Subgroup PDFRyanNo ratings yet
- Lecture - I Vector SpaceDocument5 pagesLecture - I Vector SpaceAbhijit Kar GuptaNo ratings yet
- ChaudhriDocument10 pagesChaudhriسحر سلامتیانNo ratings yet
- Precalculus: Prepared By: Calculus TeacherDocument6 pagesPrecalculus: Prepared By: Calculus TeacherJohn Aaron EugenioNo ratings yet
- International Journal of Hospitality ManagementDocument4 pagesInternational Journal of Hospitality ManagementhunnyNo ratings yet
- Compiled Planner MBA - 1Document69 pagesCompiled Planner MBA - 1Abhinav AroraNo ratings yet
- Models of HCIDocument19 pagesModels of HCIAnkit Singh Chauhan100% (1)
- Daily Lesson Log: 4. Additional Materials From Learning Resource (LR) PortalDocument24 pagesDaily Lesson Log: 4. Additional Materials From Learning Resource (LR) PortalNoemi GiganteNo ratings yet
- L01 03Document85 pagesL01 03eadaladarenuNo ratings yet