You might also like
- Conservative Endodontics Textbooks PDFDocument1 pageConservative Endodontics Textbooks PDFVenkatesh Gavini0% (1)
- Chapter 17 Maxillary SinusDocument15 pagesChapter 17 Maxillary SinusRini RahmawulandariNo ratings yet
- Aggressive Periodontitis: Localized & Generalized Forms by SamDocument24 pagesAggressive Periodontitis: Localized & Generalized Forms by SamNaghman Zuberi100% (1)
- Mingival Curettage PDFDocument52 pagesMingival Curettage PDFheycoolalexNo ratings yet
- Digital Wax Up in DentistryDocument14 pagesDigital Wax Up in Dentistrybanea costin100% (1)
- Fundamentals of Tooth Preparation PDFDocument74 pagesFundamentals of Tooth Preparation PDFAyesha AwanNo ratings yet
- Orthodontic Approach To Mid-Line DiastemaDocument33 pagesOrthodontic Approach To Mid-Line DiastemaNikola DerebanNo ratings yet
- Isolation in Endodontics 1kr997b - 2Document9 pagesIsolation in Endodontics 1kr997b - 2Black Hack HakerNo ratings yet
- Apex LocatorsDocument19 pagesApex LocatorsChandra Dhar DwivediNo ratings yet
- Tehnica Bulk FillDocument6 pagesTehnica Bulk FillVictor MarcautanNo ratings yet
- Magnification and IlluminationDocument22 pagesMagnification and Illuminationwhussien7376100% (1)
- Devices and Methods For Preheating Prewarming Dental Resin CompositesDocument4 pagesDevices and Methods For Preheating Prewarming Dental Resin CompositesMADA100% (1)
- Retreatment in Persistent Apical PeriodontitisDocument169 pagesRetreatment in Persistent Apical PeriodontitisAnciya NazarNo ratings yet
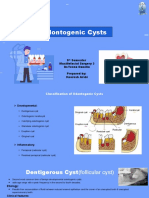
- Odontogenic CystDocument16 pagesOdontogenic CystMahsaNo ratings yet
- 2.-Tecnica Step BackDocument4 pages2.-Tecnica Step BackSamirNo ratings yet
- Acute Effects of Radiation InjuryDocument8 pagesAcute Effects of Radiation InjuryVikas VatsNo ratings yet
- Glide Path in EndodonticsDocument4 pagesGlide Path in EndodonticsKenny W100% (1)
- Five-Year Follow-Up With Procera All-Ceramic CrownsDocument9 pagesFive-Year Follow-Up With Procera All-Ceramic CrownsRamona MateiNo ratings yet
- Method of Vital Extirpation PDFDocument23 pagesMethod of Vital Extirpation PDFShany SchwarzwaldNo ratings yet
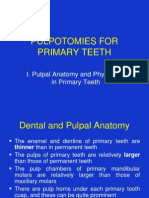
- Pulpotomies For Primary Teeth July 2010Document59 pagesPulpotomies For Primary Teeth July 2010Raksmey PhanNo ratings yet
- Face BowDocument24 pagesFace BowsavyasachinNo ratings yet
- Apex LocatorDocument21 pagesApex LocatorJan Ariel AficialNo ratings yet
- Rubber Dam - 07 - HandoutDocument12 pagesRubber Dam - 07 - HandoutOmar Al-AboodNo ratings yet
- 2 Straumann Implants TLDocument41 pages2 Straumann Implants TLjoephinNo ratings yet
- Dental Management of the Pregnant PatientFrom EverandDental Management of the Pregnant PatientChristos A. SkouterisNo ratings yet
- Cysts of The Oral CavityDocument270 pagesCysts of The Oral CavitySally Mahfouz100% (6)
- Pro Taper ManualDocument99 pagesPro Taper Manualaddii2001100% (1)
- 2 Oral Radiology MethodsDocument52 pages2 Oral Radiology MethodsWaled Karen KarenNo ratings yet
- Maxillary Injection Techniques PPT I Sas 11-14Document45 pagesMaxillary Injection Techniques PPT I Sas 11-14mavirosemandawe08No ratings yet
- The Root Morphology PDFDocument37 pagesThe Root Morphology PDFTabarcea EduardNo ratings yet
- Variolink+Esthetic LC - Glass Ceramic Restorations - Flow Chart - enDocument2 pagesVariolink+Esthetic LC - Glass Ceramic Restorations - Flow Chart - engmacaneataNo ratings yet
- Clinical Guide: All Ceramic All You NeedDocument44 pagesClinical Guide: All Ceramic All You NeedMarcelo EnsigniaNo ratings yet
- Kaloji Narayana Rao University of Health Sciences, Warangal, Telangana - 506007Document9 pagesKaloji Narayana Rao University of Health Sciences, Warangal, Telangana - 506007Sriram KasturiNo ratings yet
- Bassam - The Root Canal MorphologyDocument49 pagesBassam - The Root Canal MorphologyCarlos San MartinNo ratings yet
- Face-Bow and Articulator: Technical Instructions ManualDocument21 pagesFace-Bow and Articulator: Technical Instructions ManualPinte CarmenNo ratings yet
- AnesthesiaDocument62 pagesAnesthesiajarrie abbasNo ratings yet
- Chapter 1 - Practical Notions Concerning Dental Occlusion: Personal InformationDocument61 pagesChapter 1 - Practical Notions Concerning Dental Occlusion: Personal InformationEmil Costruț100% (1)
- Principles of ExodontiaDocument25 pagesPrinciples of ExodontiaPankaj JindalNo ratings yet
- Aparate Si Proteze Utilizate in Chirurgia Oro-Maxilo-FacialaDocument37 pagesAparate Si Proteze Utilizate in Chirurgia Oro-Maxilo-FacialaAilenei MadalinaNo ratings yet
- S Ocean U Alexandra Caz 2Document12 pagesS Ocean U Alexandra Caz 2Alexandra NituNo ratings yet
- Emax-Press-Monolithicsol Gi en - 672600 Rev1Document86 pagesEmax-Press-Monolithicsol Gi en - 672600 Rev1Fabio WenoNo ratings yet
- Endodontic InstrumentsDocument26 pagesEndodontic InstrumentsMohammed Adnan Ahmed SiddiquiNo ratings yet
- Lecture 8Document20 pagesLecture 8Alda UtamiNo ratings yet
- Dental ImplantsDocument27 pagesDental ImplantsShriganesh ChaudhariNo ratings yet
- PRF For ApicoectomyDocument7 pagesPRF For ApicoectomyShyambhavi SrivastavaNo ratings yet
- Principles of ExodontiaDocument23 pagesPrinciples of ExodontiaUmer Hussain100% (1)
- Eco Dental Instruments CatalogueDocument231 pagesEco Dental Instruments CatalogueECO SurgicalNo ratings yet
- Local Anesthetic Injection Techniques in DentistryDocument42 pagesLocal Anesthetic Injection Techniques in DentistryJu Ju Wareerat100% (1)
- 3M ESPE Filtek Bulk Fill Technical Profile - LRDocument24 pages3M ESPE Filtek Bulk Fill Technical Profile - LRelokfaiqNo ratings yet
- Operative Dentistry P1Y1Document186 pagesOperative Dentistry P1Y1Fachrul Latif DentistNo ratings yet
- 4 - Plaque Control MethodsDocument35 pages4 - Plaque Control MethodsDr. Siddana GoudNo ratings yet
- 13 Implant Supported Fixed ProsthesesDocument52 pages13 Implant Supported Fixed ProsthesesJúliaJulieNo ratings yet
- CarteDocument272 pagesCarteClaudia MoldovanuNo ratings yet
- Bio DentineDocument2 pagesBio DentineCarlos San MartinNo ratings yet
- Complicated ProstheticsDocument9 pagesComplicated Prostheticscata056No ratings yet
- TMJ AnkylosisDocument23 pagesTMJ AnkylosisRahul OptionalNo ratings yet
- A Study On Development of Endodontic Micro RobotDocument8 pagesA Study On Development of Endodontic Micro RobotChawre MustafaNo ratings yet
- Artigo 06Document8 pagesArtigo 06Julia PimentelNo ratings yet
- 02 2865 Rishika Dhimole GalleyproofDocument5 pages02 2865 Rishika Dhimole GalleyproofSushmaNo ratings yet
- Comparison of Three Questions and TMD Screening Questionnaire in Diagnostic Accuracy of Temporomandibular Disorders Amongst Patients With BruxismDocument5 pagesComparison of Three Questions and TMD Screening Questionnaire in Diagnostic Accuracy of Temporomandibular Disorders Amongst Patients With BruxismUJ CommunicationNo ratings yet
- Capillary Hemangioma Disguised in The Form of Mucocele - A Case ReportDocument3 pagesCapillary Hemangioma Disguised in The Form of Mucocele - A Case ReportUJ CommunicationNo ratings yet
- Restoration of Occlusal Plane and Esthetics in Severely Worn DentitionDocument4 pagesRestoration of Occlusal Plane and Esthetics in Severely Worn DentitionUJ CommunicationNo ratings yet
- "Functional Orthopaedics" Used in Young Growing Individuals For Correction of Skeletal Class Ii Malocclusion: - Most Reliable MethodDocument8 pages"Functional Orthopaedics" Used in Young Growing Individuals For Correction of Skeletal Class Ii Malocclusion: - Most Reliable MethodUJ CommunicationNo ratings yet
- Critical Analysis On Physiology of Negative Feedback Mechanism in Terms of Ayurveda WSR Thyroxine SecretionDocument3 pagesCritical Analysis On Physiology of Negative Feedback Mechanism in Terms of Ayurveda WSR Thyroxine SecretionUJ CommunicationNo ratings yet
- Module 1 Inclusive Education Lecture 1 & Introduction - OnlineDocument32 pagesModule 1 Inclusive Education Lecture 1 & Introduction - OnlineSharon ShenNo ratings yet
- Laser Diffraction Physics Project: Submitted By, Disha DineshDocument11 pagesLaser Diffraction Physics Project: Submitted By, Disha DineshNidaleeNo ratings yet
- Research 9: Activity 4: Background of The StudyDocument7 pagesResearch 9: Activity 4: Background of The StudyPhilip AmelingNo ratings yet
- Miracle Mills 300 Series Hammer MillsDocument2 pagesMiracle Mills 300 Series Hammer MillsSNo ratings yet
- Instruction Manual: Slit Lamp Bon SL-EDocument20 pagesInstruction Manual: Slit Lamp Bon SL-EVladimir LevchenkoNo ratings yet
- Ground Vehicle Operations ICAODocument31 pagesGround Vehicle Operations ICAOMohran HakimNo ratings yet
- Chapter 1 MPLS OAM Configuration Commands ...................................................................... 1-1Document27 pagesChapter 1 MPLS OAM Configuration Commands ...................................................................... 1-1Randy DookheranNo ratings yet
- LogDocument67 pagesLogRudhi Al GhaisanNo ratings yet
- Bhaktavatsalam Memorial College For Women: Hand Book 2020 - 21Document37 pagesBhaktavatsalam Memorial College For Women: Hand Book 2020 - 21Anu RsNo ratings yet
- Inglês - Degrees of ComparisonDocument4 pagesInglês - Degrees of ComparisonVersehgi IINo ratings yet
- Hilfswerk Wien-Salzburg - 11. Meio 2018Document9 pagesHilfswerk Wien-Salzburg - 11. Meio 2018FreieEnergieNo ratings yet
- MT4400 STRG Flo Amp ValveDocument7 pagesMT4400 STRG Flo Amp ValveBrian Careel0% (1)
- VSR Trans. PPT3Document16 pagesVSR Trans. PPT3VSR TRANSNo ratings yet
- Can Snails Become Habituated To A StimulusDocument2 pagesCan Snails Become Habituated To A StimulusSachitra Wijethunga100% (1)
- Pearson Letter To ParentsDocument2 pagesPearson Letter To ParentsPatricia WillensNo ratings yet
- SFN ProfileDocument4 pagesSFN Profiledinesh panchalNo ratings yet
- Haberman Data Logistic Regression AnalysisDocument5 pagesHaberman Data Logistic Regression AnalysisEvelynNo ratings yet
- 9A02505 Electrical Machines-IIIDocument4 pages9A02505 Electrical Machines-IIIsivabharathamurthyNo ratings yet
- BM Stake Holders Case Study 1st November 2023Document2 pagesBM Stake Holders Case Study 1st November 2023Arsath malik ArsathNo ratings yet
- Contractor Hse Management ProgramDocument12 pagesContractor Hse Management ProgramAhmed IbrahimNo ratings yet
- Term Test Pointers For Review - 1st TermDocument2 pagesTerm Test Pointers For Review - 1st Termjessica holgadoNo ratings yet
- Spying From Space - Constructing America's Satellite Command and Control Systems (PDFDrive)Document230 pagesSpying From Space - Constructing America's Satellite Command and Control Systems (PDFDrive)MohammadNo ratings yet
- Service ManualDocument582 pagesService ManualBogdan Popescu100% (5)
- WideScreen Code For PS2 GamesDocument78 pagesWideScreen Code For PS2 Gamesmarcus viniciusNo ratings yet
- Kick-Ass Customer Service-Part 1Document3 pagesKick-Ass Customer Service-Part 1Mahfuzul Haque SujanNo ratings yet
- Capital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisDocument16 pagesCapital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisHaris FendiarNo ratings yet
- 2022 Cement Lime Manufacturing Ehs Guidelines enDocument39 pages2022 Cement Lime Manufacturing Ehs Guidelines enSamiNo ratings yet
- 1.rle Rubrics For Case PresentationDocument2 pages1.rle Rubrics For Case PresentationKhristine EstosoNo ratings yet
- Module 3: Literature Review and CitationDocument3 pagesModule 3: Literature Review and CitationLysss EpssssNo ratings yet
- Entropy Equation For A Control VolumeDocument12 pagesEntropy Equation For A Control VolumenirattisaikulNo ratings yet