You might also like
- SM160 BX50 FG25T-16 Jun 2014 PDFDocument568 pagesSM160 BX50 FG25T-16 Jun 2014 PDFKomatsu Perkins Hitachi100% (9)
- Owners Manual CB Unicorn 160 EnglishDocument89 pagesOwners Manual CB Unicorn 160 Englishrcpawar33% (6)
- Ansi Iltva Z130.1 2012 1Document34 pagesAnsi Iltva Z130.1 2012 1Santhoshbharathi MECH100% (4)
- BMW Production DataDocument18 pagesBMW Production DataAria MuhammadsyahNo ratings yet
- Traction Control of Electric Vehicle: Basic Experimental Results Using The Test EV "UOT Electric March"Document8 pagesTraction Control of Electric Vehicle: Basic Experimental Results Using The Test EV "UOT Electric March"Farhan MalikNo ratings yet
- Traction Control of Electric Vehicle: Basic Experimental Results Using The Test EV "UOT Electric March"Document8 pagesTraction Control of Electric Vehicle: Basic Experimental Results Using The Test EV "UOT Electric March"Farhan MalikNo ratings yet
- Driving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsDocument15 pagesDriving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsAndrea FontanaNo ratings yet
- Torque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentsDocument12 pagesTorque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentseldincelebicNo ratings yet
- IJEART03703Document4 pagesIJEART03703anil kasotNo ratings yet
- Ahmad_Firdaus_2021_J._Phys.__Conf._Ser._1878_012047 (1)Document13 pagesAhmad_Firdaus_2021_J._Phys.__Conf._Ser._1878_012047 (1)abdul ghaniNo ratings yet
- TCST 2016 2620421Document9 pagesTCST 2016 2620421mohammad ghaderzadehNo ratings yet
- Sensorless DTC Scheme for Electric VehiclesDocument9 pagesSensorless DTC Scheme for Electric VehiclesSidahmed LarbaouiNo ratings yet
- New DTC strategy for multi-machine EV systemsDocument11 pagesNew DTC strategy for multi-machine EV systemsbounabalaeddineyahoo.frNo ratings yet
- A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsDocument13 pagesA Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsNouman AhmadNo ratings yet
- Ref 1Document9 pagesRef 1Dwiky PurbacNo ratings yet
- Research Paper 3Document4 pagesResearch Paper 3Bipasha ChakrabortyNo ratings yet
- Parellel HybridDocument6 pagesParellel HybridRasmiNo ratings yet
- A Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandDocument8 pagesA Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandsouravghimireyNo ratings yet
- Ieee TVT 2007 BenbouzidDocument10 pagesIeee TVT 2007 Benbouzidbellali badreNo ratings yet
- Two-Motor, Two-Axle Traction System For Full Electric VehicleDocument15 pagesTwo-Motor, Two-Axle Traction System For Full Electric VehicleKESAVANNo ratings yet
- 6 MailSubmission3pp54 59Document7 pages6 MailSubmission3pp54 59Abdel Kader CheikhNo ratings yet
- Regenerative Braking Control Under Sliding Braking Condition of Electric Vehicles With Switched Reluctance Motor Drive SystemDocument13 pagesRegenerative Braking Control Under Sliding Braking Condition of Electric Vehicles With Switched Reluctance Motor Drive SystemBT20MEC120 Jyoti ThakurNo ratings yet
- Fuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesDocument10 pagesFuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesSmokeysGarageNo ratings yet
- Modeling and Simulation of Steering Control Strategy For Dual MotorDocument11 pagesModeling and Simulation of Steering Control Strategy For Dual Motorالفريق الدباش WalliNo ratings yet
- Regenerativ BrakingDocument5 pagesRegenerativ BrakingAnkit SinghNo ratings yet
- Paper 2 PDFDocument6 pagesPaper 2 PDFSwati NikamNo ratings yet
- Analysis of Regenerative Braking Strategy for ElecDocument8 pagesAnalysis of Regenerative Braking Strategy for ElecHakimNo ratings yet
- Traction Control For BikeDocument10 pagesTraction Control For BikeSachin KumarNo ratings yet
- Paper Title: (16 Bold)Document5 pagesPaper Title: (16 Bold)Jeff EmiNo ratings yet
- Freio Eletronico EngrenhagensDocument6 pagesFreio Eletronico EngrenhagensThiago ChierighiniNo ratings yet
- Integrated Plant and Control Design of A Continuously Variable TransmissionDocument13 pagesIntegrated Plant and Control Design of A Continuously Variable TransmissionAldo Yoshida RigattiNo ratings yet
- Parallel HEV Hybrid Controller Modeling For Power ManagementDocument7 pagesParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNo ratings yet
- 透過預測模型及pid控制器 達成起跑控制及軌跡控制Document7 pages透過預測模型及pid控制器 達成起跑控制及軌跡控制jonathan0713twNo ratings yet
- Paper FormatDocument5 pagesPaper FormatMustakim shaikhNo ratings yet
- Bai Tap 03 - Tieng Anh Chuyen Nganh KTOT-1Document14 pagesBai Tap 03 - Tieng Anh Chuyen Nganh KTOT-1Bảo Hồng QuốcNo ratings yet
- Iet-Est 2016 0023Document7 pagesIet-Est 2016 0023Hsan HaddarNo ratings yet
- Design Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleDocument19 pagesDesign Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleARUN KUMARNo ratings yet
- paper format (1)Document6 pagespaper format (1)V D CharanNo ratings yet
- Mechanical Coupling of Two Induction MotorsDocument10 pagesMechanical Coupling of Two Induction Motorsinteresting facts in worldNo ratings yet
- Volltext PDFDocument11 pagesVolltext PDFa.monem ShoalaNo ratings yet
- Btech Final Year Project Report PDFDocument25 pagesBtech Final Year Project Report PDFShaiz AkhtarNo ratings yet
- Power Management Strategy for Parallel Hybrid Electric VehiclesDocument6 pagesPower Management Strategy for Parallel Hybrid Electric VehiclesGaurav DeshmukhNo ratings yet
- Model Based Development of Future Small Electric VehicleDocument8 pagesModel Based Development of Future Small Electric VehicleshubhamformeNo ratings yet
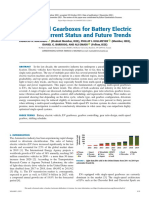
- Multi-Speed EV Gearboxes: Status & TrendsDocument17 pagesMulti-Speed EV Gearboxes: Status & TrendsSamial HasnatNo ratings yet
- Regenerative Braking Control Strategy For Electric Vehicle With Four In-Wheel MotorsDocument6 pagesRegenerative Braking Control Strategy For Electric Vehicle With Four In-Wheel MotorsMarcel BabiiNo ratings yet
- GEK - 91609 Intro - Microprocessor ControlDocument2 pagesGEK - 91609 Intro - Microprocessor ControlKJDNKJZEFNo ratings yet
- Starter Alternator MicroHybrid CarDocument7 pagesStarter Alternator MicroHybrid CartomNo ratings yet
- Traction Control of Electric Vehicle Based On The Estimation of Road Surface ConditionDocument8 pagesTraction Control of Electric Vehicle Based On The Estimation of Road Surface ConditionMahta SafrullahNo ratings yet
- In-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainsDocument15 pagesIn-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainspranjaljecNo ratings yet
- Car Wheel Slip Modelling Simulation and Control Us PDFDocument4 pagesCar Wheel Slip Modelling Simulation and Control Us PDFThien MaiNo ratings yet
- Setsci Isas-Winter-2022 0089 0017Document8 pagesSetsci Isas-Winter-2022 0089 0017Hamza ShabbirNo ratings yet
- A Literature Review On Automated Manual Transmission (AMT) : M. S. Kumbhar Proffessor Dr. D. R PanchagadeDocument4 pagesA Literature Review On Automated Manual Transmission (AMT) : M. S. Kumbhar Proffessor Dr. D. R PanchagadeIndia In NewsNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road VehicleDocument17 pagesRobust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road Vehiclekishor sahuNo ratings yet
- Fault-Tolerant Stability Control For Independent Four-Wheel Drive Electric Vehicle Under Actuator Fault ConditionsDocument11 pagesFault-Tolerant Stability Control For Independent Four-Wheel Drive Electric Vehicle Under Actuator Fault ConditionsDRISHYANo ratings yet
- Evaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDocument6 pagesEvaluation_of_Regenerative_Braking_and_its_Functionality_in_Electric_VehiclesDEBARATI DAMNo ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- Sliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric VehiclesDocument12 pagesSliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric Vehicles시드세흐리아르알리나크비No ratings yet
- Optimized Robust Cruise Control System for an Electric VehicleDocument9 pagesOptimized Robust Cruise Control System for an Electric VehicleMuhammad Aseer KhanNo ratings yet
- Aazmi 2021 J. Phys. Conf. Ser. 2107 012052Document9 pagesAazmi 2021 J. Phys. Conf. Ser. 2107 012052Prateek SinghNo ratings yet
- Energies: A Comparative Analysis of Brake-by-Wire Smart Actuators Using Optimization StrategiesDocument22 pagesEnergies: A Comparative Analysis of Brake-by-Wire Smart Actuators Using Optimization StrategiesRoxta ArunNo ratings yet
- Journal Jpe 15-5 1658292190Document12 pagesJournal Jpe 15-5 1658292190Nuri KaraoğlanNo ratings yet
- DTC with Fuzzy Logic Improves Performance of Electric Vehicle Traction SystemsDocument15 pagesDTC with Fuzzy Logic Improves Performance of Electric Vehicle Traction Systemssuntchou julesNo ratings yet
- Research Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsDocument15 pagesResearch Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsSanthoshbharathi MECHNo ratings yet
- PVQGO0C5KFDL0102(1)Document44 pagesPVQGO0C5KFDL0102(1)Santhoshbharathi MECHNo ratings yet
- Development of An Advanced Torque Vectoring Control System For An Electric Vehicle With In-Wheel Motors Using Soft Computing TechniquesDocument18 pagesDevelopment of An Advanced Torque Vectoring Control System For An Electric Vehicle With In-Wheel Motors Using Soft Computing TechniquesSanthoshbharathi MECHNo ratings yet
- Energies 10 02157 PDFDocument16 pagesEnergies 10 02157 PDFOscar ParreñoNo ratings yet
- Vehicle Dynamics With Brake HysteresisDocument35 pagesVehicle Dynamics With Brake HysteresisSanthoshbharathi MECHNo ratings yet
- 08 Chapter3 PDFDocument32 pages08 Chapter3 PDFRutvik DangarwalaNo ratings yet
- General Catalogue VOX 2016 ENGDocument172 pagesGeneral Catalogue VOX 2016 ENGJaimasaNo ratings yet
- Hunter Catalog DomDocument188 pagesHunter Catalog DomionelaNo ratings yet
- Starting System: Starter MotorDocument1 pageStarting System: Starter MotorjimmyNo ratings yet
- CBD&CBG 25manual PDFDocument120 pagesCBD&CBG 25manual PDFnamduong368No ratings yet
- TCM FB15-7Document477 pagesTCM FB15-7ЕвгенийNo ratings yet
- 275-440 kVA DEUTZ Diesel Generator Technical SpecificationsDocument2 pages275-440 kVA DEUTZ Diesel Generator Technical SpecificationsMohamed Abd ElazizNo ratings yet
- Technical Manual: For City Buses, Intercity Buses, and CoachesDocument198 pagesTechnical Manual: For City Buses, Intercity Buses, and CoachesMuhammet KınalıNo ratings yet
- Motor Cat 924HZDocument6 pagesMotor Cat 924HZAdemilson Rangelvieira100% (1)
- D20S-5 - SB1109E17 - Spare Part ManualDocument888 pagesD20S-5 - SB1109E17 - Spare Part ManualFederico Jorge DiezNo ratings yet
- GDW6115HKDDocument56 pagesGDW6115HKDpl82No ratings yet
- Engine Instructions Manual: Mini 17, Mini 26, Mini 29 Mini 33, Mini 44, Mini 55Document48 pagesEngine Instructions Manual: Mini 17, Mini 26, Mini 29 Mini 33, Mini 44, Mini 55koaa85No ratings yet
- D342 Vehicular Engine 76V00Document3 pagesD342 Vehicular Engine 76V00Omar SuazoNo ratings yet
- Compressors:: Basic Mechanical EngineeringDocument15 pagesCompressors:: Basic Mechanical EngineeringMelanie Love Pjr AlcantaraNo ratings yet
- PC3000 6 Aess785 00 PDFDocument8 pagesPC3000 6 Aess785 00 PDFdonbowoNo ratings yet
- Modern Automotive TechnologyDocument27 pagesModern Automotive TechnologyJose Manuel PanzeraNo ratings yet
- C810-GDP - GLP16-18VX, GDP - GLP20SVX - (07-2006)Document492 pagesC810-GDP - GLP16-18VX, GDP - GLP20SVX - (07-2006)Alexey SharunovNo ratings yet
- Ferrari 365gt2+2 - Buyers - Guide PDFDocument10 pagesFerrari 365gt2+2 - Buyers - Guide PDFBennyLouPlummerNo ratings yet
- Java Printingkia SportajeDocument2 pagesJava Printingkia SportajeElectroventica ElectroventicaNo ratings yet
- NH CE Reman Engines Application GuideDocument8 pagesNH CE Reman Engines Application GuideFernando Garcia CortesNo ratings yet
- Filter 656DDocument6 pagesFilter 656DChandra B. SaragihNo ratings yet
- 385 kVA Powered Generator SetDocument4 pages385 kVA Powered Generator Setandy reyesNo ratings yet
- Piston Engine - Weight BasedDocument7 pagesPiston Engine - Weight BasedVEERAMANINo ratings yet
- (PONTIAC) Manual de Taller Armado y Desarmado Motor Pontiac Aztek 2001 Ingles PDFDocument34 pages(PONTIAC) Manual de Taller Armado y Desarmado Motor Pontiac Aztek 2001 Ingles PDFtrastornadojhonNo ratings yet
- 01 Chevrolet Corvette SCCA TransAm DerhaagDocument2 pages01 Chevrolet Corvette SCCA TransAm DerhaagRainer NybergNo ratings yet
- Brochure of XCT25L5 - YDocument16 pagesBrochure of XCT25L5 - YSusti AwanNo ratings yet
- Spare Parts Catalog: Engine Type: BF 4L1011FT Serial Number: 8173683 Output: 42,0kW Speed: 2300 1/minDocument93 pagesSpare Parts Catalog: Engine Type: BF 4L1011FT Serial Number: 8173683 Output: 42,0kW Speed: 2300 1/minЖеня Стець100% (1)
- Perkins 1106D Technical DataDocument8 pagesPerkins 1106D Technical DataalcoholahmedNo ratings yet
- 13 INSP 0013 MultiWheel Roller CheckDocument1 page13 INSP 0013 MultiWheel Roller CheckBarock NaturelNo ratings yet
- Gte PerformanceDocument35 pagesGte Performancejacob ellyNo ratings yet