You might also like
- Vehicle DynamicsDocument73 pagesVehicle DynamicsGirish ChandranNo ratings yet
- Maintenance of Electrical PlantDocument37 pagesMaintenance of Electrical Plantshah siddiqNo ratings yet
- Aplicacion Autotransformador 7ut613Document3 pagesAplicacion Autotransformador 7ut613santiagoramosNo ratings yet
- ACS800-04 HW ManualDocument132 pagesACS800-04 HW Manualmodelador3dNo ratings yet
- Locomotive Major Components InentoryDocument40 pagesLocomotive Major Components InentoryMetzger Tamba KendemaNo ratings yet
- On Load Tap Changer. MRDocument84 pagesOn Load Tap Changer. MRJE LazaroNo ratings yet
- Application of Undervoltage Protection To Critical Motors PDFDocument6 pagesApplication of Undervoltage Protection To Critical Motors PDFarisNo ratings yet
- REF Fuse Application GuideDocument17 pagesREF Fuse Application GuidemuskanumeedNo ratings yet
- 1 PH Autotransformer Em1Document8 pages1 PH Autotransformer Em1Ahmed M H Al-YousifNo ratings yet
- Motor Protection SiemensDocument10 pagesMotor Protection SiemensViviane MaiaNo ratings yet
- Generator Synchronization and TransformerDocument9 pagesGenerator Synchronization and TransformerAyberk ArdıçNo ratings yet
- Electric 2 Suzuki VL800Document19 pagesElectric 2 Suzuki VL800Crisan SorinNo ratings yet
- A Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyDocument67 pagesA Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyGunjan VarshneyNo ratings yet
- 400kv Final PPT by MayankDocument20 pages400kv Final PPT by MayankMayank Mishra83% (12)
- Synchronous CondenserDocument2 pagesSynchronous CondenserblaagicaNo ratings yet
- Electric Drives System - PGDocument252 pagesElectric Drives System - PGKrishna SahooNo ratings yet
- Hand Outs of EHVDocument31 pagesHand Outs of EHVRohan RustagiNo ratings yet
- Reciprocating Pump: Presented ByDocument10 pagesReciprocating Pump: Presented ByNikhil ChauhanNo ratings yet
- Testing Potential Transformers: by Les Warner (PCA Valence) and Chris Werstiuk (Valence Electrical Training Services LLC)Document11 pagesTesting Potential Transformers: by Les Warner (PCA Valence) and Chris Werstiuk (Valence Electrical Training Services LLC)Avik Poudel100% (1)
- How Does An Inductor WorkDocument3 pagesHow Does An Inductor WorkKate Shaira V. MaguilaNo ratings yet
- Generator Protection PDFDocument10 pagesGenerator Protection PDFSaikat Mahmud100% (1)
- Asme B1.2 1983Document190 pagesAsme B1.2 1983bayu212100% (2)
- Artificial Loading of Induction MotorsDocument6 pagesArtificial Loading of Induction Motorsamkeew100% (1)
- Maintenance Manual - TD-TSP-0004-2A PDFDocument19 pagesMaintenance Manual - TD-TSP-0004-2A PDFSidhartha MallickNo ratings yet
- Design and Operation of EHV Transmission LinesDocument10 pagesDesign and Operation of EHV Transmission LinesAlejandro Ramirez BenitesNo ratings yet
- Technical SeminarDocument27 pagesTechnical SeminarYash BhattiproluNo ratings yet
- Insulators: Submitted byDocument18 pagesInsulators: Submitted byGurpreet UppalNo ratings yet
- Difference Glass Fibers OrientationDocument109 pagesDifference Glass Fibers Orientationmustafa saadNo ratings yet
- 2004 Doble Paper 3.16.04Document11 pages2004 Doble Paper 3.16.04KUNALJAY100% (1)
- Over-Flux Protection of The Transformer: Pushpak R. Nimkar T. G. AroraDocument6 pagesOver-Flux Protection of The Transformer: Pushpak R. Nimkar T. G. AroramohammedNo ratings yet
- REV615 Capacitor Bank Protection and ControlDocument6 pagesREV615 Capacitor Bank Protection and Controledg 3434No ratings yet
- Selection of Current Transformers (CTS) Based On Short Circuit Study ReportDocument5 pagesSelection of Current Transformers (CTS) Based On Short Circuit Study ReportSatya VasuNo ratings yet
- Assignment No. 2: High Voltage Engineering (Eed-421) On Insulation Coordination and Over Voltages in Power SystemsDocument35 pagesAssignment No. 2: High Voltage Engineering (Eed-421) On Insulation Coordination and Over Voltages in Power SystemsRishabh KaliaNo ratings yet
- Unit-I Circuit BreakersDocument13 pagesUnit-I Circuit Breakerspurushg62No ratings yet
- Specifying Lightning Arrester For Substations: Step 1 - Discharge Voltage & McovDocument1 pageSpecifying Lightning Arrester For Substations: Step 1 - Discharge Voltage & McovCHELEMLNo ratings yet
- Distribution Transformer CIPLDocument25 pagesDistribution Transformer CIPLanon_515911428No ratings yet
- Tap Changer DetailsDocument12 pagesTap Changer Detailsbpd21100% (1)
- Reverse PowerDocument6 pagesReverse PowerEdward DineshNo ratings yet
- Gen Circuit Breaker Testing SchedulesDocument3 pagesGen Circuit Breaker Testing ScheduleslrpatraNo ratings yet
- Alstom - Digital Integrated Generator Protection RelayDocument24 pagesAlstom - Digital Integrated Generator Protection RelayNinh Quoc TrungNo ratings yet
- VT Guard Pro - Technical ArticleDocument4 pagesVT Guard Pro - Technical ArticleAdemir DzanicNo ratings yet
- Topic MCCBDocument10 pagesTopic MCCBEyad A. FeilatNo ratings yet
- Jvs Manual JRD 011Document5 pagesJvs Manual JRD 011ashutosh20090% (1)
- Electromagnetic Relays - ManiDocument17 pagesElectromagnetic Relays - ManipraveenaprabhuNo ratings yet
- ML023030070 USNRC Power Plant Engineering 3Document170 pagesML023030070 USNRC Power Plant Engineering 3MutahirrasoolNo ratings yet
- Ee 591 Machine 2 PDFDocument39 pagesEe 591 Machine 2 PDFPrabhat Kumar SahuNo ratings yet
- 20 - Current Transformer (Mag Electric) PDFDocument5 pages20 - Current Transformer (Mag Electric) PDFsaina124796010No ratings yet
- ReadmeDocument190 pagesReadmeJAIMES ALFONSO JINA MARIANo ratings yet
- Telenor BDVDocument15 pagesTelenor BDVShahid IqbalNo ratings yet
- Substation Visit NelamangalaDocument16 pagesSubstation Visit NelamangalaAJAN A100% (1)
- KT NTPC Power TransformersDocument63 pagesKT NTPC Power TransformersKaran Tripathi100% (1)
- TJM Section3 ApplicationsDocument5 pagesTJM Section3 ApplicationsVishal PatelNo ratings yet
- Modeling and Simulation of Internal Faults in Salient Pole Synchronous Generators With Wave WindingsDocument16 pagesModeling and Simulation of Internal Faults in Salient Pole Synchronous Generators With Wave Windingsafru2000No ratings yet
- Auto Reclose TestingDocument2 pagesAuto Reclose TestingSanjin Čamur100% (1)
- Differential ProtectionDocument8 pagesDifferential Protectionchandra_shekhar2221941No ratings yet
- Introduction of Underground CableDocument4 pagesIntroduction of Underground CableAp kowshikNo ratings yet
- Power Factor Correction by Pulse Width Modulated Switched Single CapacitorDocument26 pagesPower Factor Correction by Pulse Width Modulated Switched Single CapacitorDevendra SharmaNo ratings yet
- Slip Ring Motor Liquid Resistor Soft Starting System (HV-LRS) PDFDocument4 pagesSlip Ring Motor Liquid Resistor Soft Starting System (HV-LRS) PDFLouie FernandezNo ratings yet
- Trans Part2Document20 pagesTrans Part2eagles1109No ratings yet
- Tests Performed in An Alternator: Dcresistancetest Open Circuit Test Short Circuit TestDocument30 pagesTests Performed in An Alternator: Dcresistancetest Open Circuit Test Short Circuit TestOSAMANo ratings yet
- Inter Connecting Transformer Protection: Download App Install Read Books, Audiobooks, and More Scribd, IncDocument4 pagesInter Connecting Transformer Protection: Download App Install Read Books, Audiobooks, and More Scribd, IncRaheem KhanNo ratings yet
- Sts 5000Document24 pagesSts 5000sophie14No ratings yet
- Arc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFDocument4 pagesArc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFHANRI ,No ratings yet
- Differential Equations Third Order Inhomogeneous Linear With Boundary ConditionsDocument6 pagesDifferential Equations Third Order Inhomogeneous Linear With Boundary ConditionsEditor IJTSRDNo ratings yet
- An Analysis On The Use of Image Design With Generative AI TechnologiesDocument4 pagesAn Analysis On The Use of Image Design With Generative AI TechnologiesEditor IJTSRDNo ratings yet
- Design Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemDocument6 pagesDesign Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemEditor IJTSRDNo ratings yet
- Sustainable EnergyDocument8 pagesSustainable EnergyEditor IJTSRDNo ratings yet
- Activating Geospatial Information For Sudans Sustainable Investment MapDocument13 pagesActivating Geospatial Information For Sudans Sustainable Investment MapEditor IJTSRDNo ratings yet
- Educational Unity Embracing Diversity For A Stronger SocietyDocument6 pagesEducational Unity Embracing Diversity For A Stronger SocietyEditor IJTSRDNo ratings yet
- Deconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesDocument6 pagesDeconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesEditor IJTSRDNo ratings yet
- Collective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtDocument10 pagesCollective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtEditor IJTSRDNo ratings yet
- Artificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Document9 pagesArtificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Editor IJTSRDNo ratings yet
- Challenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaDocument18 pagesChallenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaEditor IJTSRDNo ratings yet
- International Journal of Trend in Scientific Research and Development (IJTSRD)Document13 pagesInternational Journal of Trend in Scientific Research and Development (IJTSRD)Editor IJTSRDNo ratings yet
- An Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyDocument7 pagesAn Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyEditor IJTSRDNo ratings yet
- Consumers' Impulsive Buying Behavior in Social Commerce PlatformsDocument5 pagesConsumers' Impulsive Buying Behavior in Social Commerce PlatformsEditor IJTSRDNo ratings yet
- A Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityDocument6 pagesA Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityEditor IJTSRDNo ratings yet
- Evan Syndrome A Case ReportDocument3 pagesEvan Syndrome A Case ReportEditor IJTSRDNo ratings yet
- Sustainable Development A PrimerDocument9 pagesSustainable Development A PrimerEditor IJTSRDNo ratings yet
- Women Before and After Islam With Special Reference To ArabDocument3 pagesWomen Before and After Islam With Special Reference To ArabEditor IJTSRDNo ratings yet
- To Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyDocument4 pagesTo Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyEditor IJTSRDNo ratings yet
- Challenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraDocument4 pagesChallenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraEditor IJTSRDNo ratings yet
- Effectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiDocument3 pagesEffectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiEditor IJTSRDNo ratings yet
- An Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesDocument4 pagesAn Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesEditor IJTSRDNo ratings yet
- Role of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyDocument3 pagesRole of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyEditor IJTSRDNo ratings yet
- H1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorDocument8 pagesH1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorEditor IJTSRDNo ratings yet
- A Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiDocument5 pagesA Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiEditor IJTSRDNo ratings yet
- Financial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaDocument12 pagesFinancial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaEditor IJTSRDNo ratings yet
- Knowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsDocument4 pagesKnowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsEditor IJTSRDNo ratings yet
- Concept of Shotha W.S.R To Arishta LakshanaDocument3 pagesConcept of Shotha W.S.R To Arishta LakshanaEditor IJTSRDNo ratings yet
- A Study On Human Resource AccountingDocument3 pagesA Study On Human Resource AccountingEditor IJTSRDNo ratings yet
- Importance of Controlled CreditDocument3 pagesImportance of Controlled CreditEditor IJTSRDNo ratings yet
- A Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurDocument4 pagesA Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurEditor IJTSRDNo ratings yet
- History of Aviation: Name - Satyapal Yadav ROLL NO-153621Document21 pagesHistory of Aviation: Name - Satyapal Yadav ROLL NO-153621rakesh mangoreNo ratings yet
- Thermostatic Temperature Control AccessoriesDocument26 pagesThermostatic Temperature Control Accessoriesvikrampatel1986No ratings yet
- Investigations On Whistle Noise in Automotive Exhaust System MufflersDocument7 pagesInvestigations On Whistle Noise in Automotive Exhaust System MufflersTaleb AlrayyesNo ratings yet
- 1 PDFDocument5 pages1 PDFAnonymous 8209ZTNo ratings yet
- Fgas Refrigerant CalculatorDocument12 pagesFgas Refrigerant CalculatorriyasudheenmhNo ratings yet
- Quiz#1 Stress CE 201Document15 pagesQuiz#1 Stress CE 201carolNo ratings yet
- Utilization of Electrical Energy Objective Type Questions Unit-I Electric Heating and WeldingDocument24 pagesUtilization of Electrical Energy Objective Type Questions Unit-I Electric Heating and WeldingM S TejaNo ratings yet
- Mahindra Tractor WarrantyDocument3 pagesMahindra Tractor WarrantyNayaGaadi DavangereNo ratings yet
- Master CurveDocument31 pagesMaster CurvearlyNo ratings yet
- Kinematics ProblemsDocument25 pagesKinematics ProblemsPhani Raj SeraguntaNo ratings yet
- Pressure Vessel HeadsDocument2 pagesPressure Vessel HeadsAriq FauzanNo ratings yet
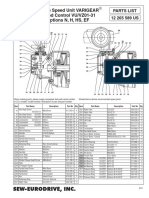
- Variable Speed Unit VARIGEAR Speed Control VU/VZ01-31 Options N, H, HS, EFDocument1 pageVariable Speed Unit VARIGEAR Speed Control VU/VZ01-31 Options N, H, HS, EFcarlos aguileraNo ratings yet
- MOM Chapter 03 New-EditedDocument22 pagesMOM Chapter 03 New-Editednur yusufNo ratings yet
- Ket - Gambar Wiring BOMAKDocument3 pagesKet - Gambar Wiring BOMAKEka SukandaNo ratings yet
- Sd-Egrd-6.7c-07 (6.7l 07-09' Cummins Egr Delete)Document12 pagesSd-Egrd-6.7c-07 (6.7l 07-09' Cummins Egr Delete)Angel FraustoNo ratings yet
- Design of Walking Beam Pendle Axle Suspension System: K. Arunachalam, P. Mannar JawaharDocument4 pagesDesign of Walking Beam Pendle Axle Suspension System: K. Arunachalam, P. Mannar JawaharHugo RodriguezNo ratings yet
- S Setting Value, C Check Value) OT Outside Tolerance (X Is Set)Document4 pagesS Setting Value, C Check Value) OT Outside Tolerance (X Is Set)Екатерина Калашникова100% (1)
- Merits and Advantages of Electric TractionDocument4 pagesMerits and Advantages of Electric TractionShailesh YadavNo ratings yet
- JBF - Track Adjustment - AdjustDocument5 pagesJBF - Track Adjustment - AdjustcatoperatorsNo ratings yet
- SlabDocument8 pagesSlabchristianNo ratings yet
- Site Diary: Project: Membina Jalan Perhubungan Desa Dari Koa Simoi Lama Ke Pos Lenjang, Lipis, PahangDocument2 pagesSite Diary: Project: Membina Jalan Perhubungan Desa Dari Koa Simoi Lama Ke Pos Lenjang, Lipis, Pahangtamimi_mohamedNo ratings yet
- J-R Behaviour of 20mnmoni55 Pressure Vessel Steel: Aravind K ROLL NO: 207MM112Document107 pagesJ-R Behaviour of 20mnmoni55 Pressure Vessel Steel: Aravind K ROLL NO: 207MM112Денис ПекшуевNo ratings yet
- Siesmic Zone Coefficient - ValueDocument1 pageSiesmic Zone Coefficient - ValueMahtab HossainNo ratings yet
- Catalogue 118 JJDocument132 pagesCatalogue 118 JJkorpaapNo ratings yet
- ANSYS Polystat Users GuideDocument180 pagesANSYS Polystat Users GuideShady Adel AliNo ratings yet