You might also like
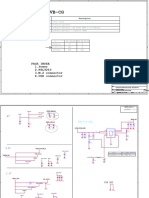
- RTL9210-VB-CG Demo V203 PDFDocument5 pagesRTL9210-VB-CG Demo V203 PDFCenusa MihaiNo ratings yet
- Asme B18.8.2 2000Document39 pagesAsme B18.8.2 2000Jesse ChenNo ratings yet
- Canadian Tire Corp. - Supply Chain Best PracticesDocument7 pagesCanadian Tire Corp. - Supply Chain Best PracticesAnonymous WkbmWCa8MNo ratings yet
- PDFDocument24 pagesPDFOlga Joy Labajo GerastaNo ratings yet
- ME340 Lab03 Handout Simulink IntroDocument8 pagesME340 Lab03 Handout Simulink IntroIbrahim MoamenNo ratings yet
- EGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Document65 pagesEGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Curro Espadafor Fernandez AmigoNo ratings yet
- MATLAB Codes For Finite Element AnalysisDocument8 pagesMATLAB Codes For Finite Element AnalysisJenatyNo ratings yet
- Lab 6 QUBE-Servo Stability Analysis Workbook (Student)Document5 pagesLab 6 QUBE-Servo Stability Analysis Workbook (Student)Luis EnriquezNo ratings yet
- Electromagnetic TheoryDocument35 pagesElectromagnetic Theorytareq omarNo ratings yet
- TAD1150-1152VE: Low Cost of OwnershipDocument2 pagesTAD1150-1152VE: Low Cost of OwnershipTioNo ratings yet
- Astm D 1037 1999Document31 pagesAstm D 1037 1999Shubham SharmaNo ratings yet
- Total NotesDocument442 pagesTotal NotesArmando MaloneNo ratings yet
- Creating An Altair Flux ProjectDocument33 pagesCreating An Altair Flux ProjectTusharNo ratings yet
- Lab 3 QUBE-Servo First Principles Modeling Workbook (Student)Document6 pagesLab 3 QUBE-Servo First Principles Modeling Workbook (Student)Luis EnriquezNo ratings yet
- Lab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Document6 pagesLab 4 QUBE-Servo Bump Test Modeling Workbook (Student)Luis EnriquezNo ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Flowcode Introductory Course PDFDocument12 pagesFlowcode Introductory Course PDFmawunyoNo ratings yet
- Self Mutual InductanceDocument49 pagesSelf Mutual InductancebhaskaaNo ratings yet
- Comparison of Three SVPWM StrategiesDocument5 pagesComparison of Three SVPWM Strategiesఅనిల్ కుమార్ రాజగిరిNo ratings yet
- Matlab Simulink IntroDocument14 pagesMatlab Simulink IntrobdeepeshNo ratings yet
- 0 - Nasir Inam MS WorkDocument63 pages0 - Nasir Inam MS Workumer_riaz64No ratings yet
- Lab 3Document7 pagesLab 3jisteeleNo ratings yet
- 9A03401 Kinematics of MachineryDocument8 pages9A03401 Kinematics of MachinerysivabharathamurthyNo ratings yet
- Vibration Isolation and Force Transmissibility - 6Document50 pagesVibration Isolation and Force Transmissibility - 6Jay PrasathNo ratings yet
- RF MEMS Filters RF MEMS Filters RF MEMS Filters RF MEMS FiltersDocument38 pagesRF MEMS Filters RF MEMS Filters RF MEMS Filters RF MEMS Filtersstanpjames2309No ratings yet
- PB 2 Rayleigh Ritz Method For General Plate Analysis 1993Document6 pagesPB 2 Rayleigh Ritz Method For General Plate Analysis 1993ciscoNo ratings yet
- MBD PDFDocument53 pagesMBD PDFMina ZakariaNo ratings yet
- Matlab Robust Control ToolboxDocument168 pagesMatlab Robust Control ToolboxRishi Kant SharmaNo ratings yet
- Correlation of A Cantilever Beam Using Beam Theory Finite Element Method and TestsDocument17 pagesCorrelation of A Cantilever Beam Using Beam Theory Finite Element Method and TestsadityaNo ratings yet
- Notes On Power Spectral Density (PSD) Estimation Using MatlabDocument10 pagesNotes On Power Spectral Density (PSD) Estimation Using MatlabPhilip Wang100% (1)
- Global Optimization With MATLAB Products (Draft) - MathWorks PDFDocument67 pagesGlobal Optimization With MATLAB Products (Draft) - MathWorks PDFrajNo ratings yet
- Ac3 SsiDocument13 pagesAc3 SsiAli Imam SunnyNo ratings yet
- Introduction To Bond GraphsDocument8 pagesIntroduction To Bond GraphsamiritehNo ratings yet
- Tutorial of The Bond GraphDocument22 pagesTutorial of The Bond Graphsf111No ratings yet
- CNC Block DiagramDocument8 pagesCNC Block DiagramMohamed AtifNo ratings yet
- COMSOL 4.3b - Introduction To Structural Mechanics ModuleDocument52 pagesCOMSOL 4.3b - Introduction To Structural Mechanics ModuleForeverSleepingNo ratings yet
- Computing Applications in Mechanical Systems (MATLAB Simulink)Document299 pagesComputing Applications in Mechanical Systems (MATLAB Simulink)lawlawNo ratings yet
- Final Cruise ControlDocument26 pagesFinal Cruise ControlKusum LataNo ratings yet
- Operational AmplifierDocument29 pagesOperational AmplifierAlit WinayaNo ratings yet
- Calculation of Cogging TorqueDocument4 pagesCalculation of Cogging TorqueMehdi SepehriNo ratings yet
- Multiobjective Optimization Package of Modefrontier: The State of The Art SurveyDocument102 pagesMultiobjective Optimization Package of Modefrontier: The State of The Art SurveyAmir MosaviNo ratings yet
- NFEM Ch01 PDFDocument15 pagesNFEM Ch01 PDFmadhuNo ratings yet
- DC Motor Model Using SimscapeDocument27 pagesDC Motor Model Using SimscapegudduNo ratings yet
- C Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiaDocument8 pagesC Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiasureshNo ratings yet
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABDocument6 pagesIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- Tutorial MyrioDocument57 pagesTutorial MyrioLucky Pandu Melyanto100% (1)
- Modeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDDocument24 pagesModeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDAchmad Nur HusainiNo ratings yet
- Wheeled Inverted Pendulum EquationsDocument10 pagesWheeled Inverted Pendulum EquationsMunzir ZafarNo ratings yet
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemNo ratings yet
- SNUx Chapter 3 PDFDocument22 pagesSNUx Chapter 3 PDFMuhammad IrfanNo ratings yet
- Arx ModelsDocument14 pagesArx ModelsJoãoEdgarNo ratings yet
- Chapter 2 Axial and Torsional ElementsDocument57 pagesChapter 2 Axial and Torsional ElementsAhmad FaidhiNo ratings yet
- What Is MatlabDocument5 pagesWhat Is Matlabyash143565No ratings yet
- Hoist 1-2Document9 pagesHoist 1-2Wee Soon ChaiNo ratings yet
- Febry PerotDocument10 pagesFebry PerotAchay Ahmad100% (1)
- Gams PowerDocument8 pagesGams PowerarmarulandaNo ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994From EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994No ratings yet
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDocument6 pagesOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNo ratings yet
- TutorialDocument4 pagesTutorialAnonymous WkbmWCa8MNo ratings yet
- Lec8h2 OptimalControl PDFDocument83 pagesLec8h2 OptimalControl PDFAnonymous WkbmWCa8MNo ratings yet
- Elect: AFIT/GAE/ENY/9 ID-18Document114 pagesElect: AFIT/GAE/ENY/9 ID-18Anonymous WkbmWCa8MNo ratings yet
- Elect: AFIT/GAE/ENY/9 ID-18Document114 pagesElect: AFIT/GAE/ENY/9 ID-18Anonymous WkbmWCa8MNo ratings yet
- ! Maximini2004Document6 pages! Maximini2004Anonymous WkbmWCa8MNo ratings yet
- Deadtime Modeling For First Order Plus Dead Time Process in A Process IndustryDocument3 pagesDeadtime Modeling For First Order Plus Dead Time Process in A Process IndustryAnonymous WkbmWCa8MNo ratings yet
- Hu2013 PDFDocument15 pagesHu2013 PDFAnonymous WkbmWCa8MNo ratings yet
- Cu Rad AcaDocument9 pagesCu Rad AcaAnonymous WkbmWCa8MNo ratings yet
- Ventili Kao Aktuatori: OS4UIP 2013Document14 pagesVentili Kao Aktuatori: OS4UIP 2013Anonymous WkbmWCa8MNo ratings yet
- Ho1999 PDFDocument7 pagesHo1999 PDFAnonymous WkbmWCa8MNo ratings yet
- Nguyen 2011Document11 pagesNguyen 2011Anonymous WkbmWCa8MNo ratings yet
- Three-Dimensional Visualization of Nichols, Hall, and Robust-Performance DiagramsDocument6 pagesThree-Dimensional Visualization of Nichols, Hall, and Robust-Performance DiagramsAnonymous WkbmWCa8MNo ratings yet
- Frequency Response Based PID Controller Design With Set Point FilterDocument4 pagesFrequency Response Based PID Controller Design With Set Point FilterAnonymous WkbmWCa8MNo ratings yet
- PID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangDocument7 pagesPID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangAnonymous WkbmWCa8MNo ratings yet
- Learning CurvesDocument15 pagesLearning CurvesInnocent Won AberNo ratings yet
- Formulation of Hand Made Soap by Using Goat MilkDocument8 pagesFormulation of Hand Made Soap by Using Goat MilkIJRASETPublicationsNo ratings yet
- Adventitious AnglesDocument10 pagesAdventitious Angles卢剑辉No ratings yet
- Identity Management For IBM Cognos 8 With IBM Tivoli Identity Manager Redp4643Document40 pagesIdentity Management For IBM Cognos 8 With IBM Tivoli Identity Manager Redp4643bupbechanhNo ratings yet
- Guidelines For The Preparation of The BS/MCS Project / B.S Thesis Department of Computer Science University of KarachiDocument12 pagesGuidelines For The Preparation of The BS/MCS Project / B.S Thesis Department of Computer Science University of KarachiMuhammad REhan AliNo ratings yet
- Vibration Test PDFDocument4 pagesVibration Test PDFSameer KmNo ratings yet
- Synchronous Condenser: Synchronous Compensator) Is A Device Identical To ADocument8 pagesSynchronous Condenser: Synchronous Compensator) Is A Device Identical To AAdeniji Olusegun100% (1)
- Ai OLogDocument1 pageAi OLogFera DesnawatiNo ratings yet
- The K-Armed Dueling Bandits ProblemDocument33 pagesThe K-Armed Dueling Bandits Problemtvboxsmart newNo ratings yet
- C Programming 8Th Ed Edition D S Full Chapter PDF ScribdDocument67 pagesC Programming 8Th Ed Edition D S Full Chapter PDF Scribdjack.bowlin207100% (8)
- Amstad Et Al 2011-Work-Family Conflict PDFDocument19 pagesAmstad Et Al 2011-Work-Family Conflict PDFMaite AurtenecheaNo ratings yet
- Catalogue 2Document30 pagesCatalogue 2Radhakrishna YenuguNo ratings yet
- Mss SP 79 FittingDocument3 pagesMss SP 79 FittingmadhurNo ratings yet
- Game Theory With Mixed StrategyDocument16 pagesGame Theory With Mixed StrategyMath DepartmentNo ratings yet
- Solved - Farmer Jones Must Determine How Many Acres of Com and W...Document1 pageSolved - Farmer Jones Must Determine How Many Acres of Com and W...Melusi DocNo ratings yet
- Poisson's Ratio Values For Different MaterialsDocument2 pagesPoisson's Ratio Values For Different Materialsricardogv2010No ratings yet
- General Biology: Peralta III Edwin C. STEM-GalileoDocument10 pagesGeneral Biology: Peralta III Edwin C. STEM-GalileoSavage CabbageNo ratings yet
- Differences Between Windows and LinuxDocument4 pagesDifferences Between Windows and LinuxYusuf Ismail100% (1)
- Triforma Configuartion VariablesDocument17 pagesTriforma Configuartion VariablesPoppy LooksNo ratings yet
- STD 8 EngDocument37 pagesSTD 8 EngZuresh PathNo ratings yet
- 1 ENSC 102L - Module-I (Activity 1-LA#1)Document9 pages1 ENSC 102L - Module-I (Activity 1-LA#1)Ciane PattyNo ratings yet
- Effective Feature Fusion Network in BIFPN For Small Object DetectionDocument5 pagesEffective Feature Fusion Network in BIFPN For Small Object DetectionUppuluri Lalitha Madhuri100% (1)
- 2023 MTAP: Grade 4 Session 3Document13 pages2023 MTAP: Grade 4 Session 3JENNY ANN VEGILLANo ratings yet
- Logarithms Surds and Indices Formulas Cracku PDFDocument6 pagesLogarithms Surds and Indices Formulas Cracku PDFChaitanya PatelNo ratings yet
- Differential Phase Shift KeyingDocument7 pagesDifferential Phase Shift KeyingkomemotinNo ratings yet
- Tool and Die QuestionsDocument8 pagesTool and Die QuestionsKishan SahuNo ratings yet