You might also like
- HMC5883L DatasheetDocument21 pagesHMC5883L DatasheetkishorevennelaNo ratings yet
- 3-Axis Digital Compass IC HMC5983: Features BenefitDocument28 pages3-Axis Digital Compass IC HMC5983: Features BenefitCharitha WeerasooriyaNo ratings yet
- 3-Axis Digital Compass IC HMC5883L: Features BenefitsDocument18 pages3-Axis Digital Compass IC HMC5883L: Features BenefitsMuhammad Firza AsharNo ratings yet
- SCA2100-D02 High Performance 2-Axis Accelerometer Data SheetDocument5 pagesSCA2100-D02 High Performance 2-Axis Accelerometer Data SheetshadyghanemNo ratings yet
- CM DatasheetDocument2 pagesCM DatasheetRahul BharadwajNo ratings yet
- Datasheet QMC5883L 1.0Document19 pagesDatasheet QMC5883L 1.0easy labNo ratings yet
- HMC5883L DatasheetDocument18 pagesHMC5883L Datasheethoangminh03072002No ratings yet
- Three-Axis Magnetic Sensor Hybrid: FeaturesDocument4 pagesThree-Axis Magnetic Sensor Hybrid: FeaturesMelquior PaniniNo ratings yet
- 1998 BEI GYROCHIP Model QRS 11 Machined Angular Rate Sensor Systron Donner Intertial Division BEI Technologies Inc 1998Document2 pages1998 BEI GYROCHIP Model QRS 11 Machined Angular Rate Sensor Systron Donner Intertial Division BEI Technologies Inc 1998C MNo ratings yet
- Elevator Encoder Product GuideDocument6 pagesElevator Encoder Product GuideReynold Suarez100% (1)
- Sec385 TMDocument13 pagesSec385 TMАндрейNo ratings yet
- MouseSensor MCS 12086 DatasheetDocument7 pagesMouseSensor MCS 12086 Datasheetpourya amiriNo ratings yet
- DatasheetDocument8 pagesDatasheetStuxnetNo ratings yet
- CP36U Series: TMR Element Contactless Angle Sensor Equipped With MicrocomputerDocument6 pagesCP36U Series: TMR Element Contactless Angle Sensor Equipped With MicrocomputerAlsammak2009No ratings yet
- 1 Sch24ab Specifications 20 PDFDocument2 pages1 Sch24ab Specifications 20 PDFMehedi HasanNo ratings yet
- Datasheet s1 Pressure TransducerDocument6 pagesDatasheet s1 Pressure TransducerAlexander BerbinNo ratings yet
- Inclinometer Lca326t PDFDocument10 pagesInclinometer Lca326t PDFManasi NaikNo ratings yet
- Raytek TXDocument4 pagesRaytek TXRafael Pertile CarneiroNo ratings yet
- SST20 Datasheet EN 2016 06 02 PDFDocument4 pagesSST20 Datasheet EN 2016 06 02 PDFStefano BarbieriNo ratings yet
- Milliohm Meter YF-508 Ctds PDFDocument1 pageMilliohm Meter YF-508 Ctds PDFristanintanNo ratings yet
- SRS-008 SCA128T DatasheetDocument7 pagesSRS-008 SCA128T DatasheetmiqbalNo ratings yet
- DTS Tkda 08-2019 EngDocument2 pagesDTS Tkda 08-2019 EngErick PerezNo ratings yet
- UnderDevelop CP36UeDocument3 pagesUnderDevelop CP36UeduyhaoNo ratings yet
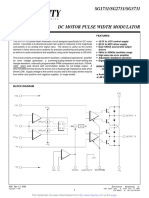
- SG1731/SG2731/SG3731: Features DescriptionDocument5 pagesSG1731/SG2731/SG3731: Features DescriptionRavindra MaraweeraNo ratings yet
- WM3-96 ManualDocument18 pagesWM3-96 Manualpayolin77No ratings yet
- MXD6235QDocument6 pagesMXD6235QBENTABET AKILANo ratings yet
- Raycmltk3m DatasheetDocument4 pagesRaycmltk3m DatasheetPuji AntoroNo ratings yet
- Datasheet A3M60A-BEPB014x17 1053332 enDocument8 pagesDatasheet A3M60A-BEPB014x17 1053332 enRadu StamatinNo ratings yet
- Sensor principle and electrical data for MH-C and MH-C2 magnetic angle sensorsDocument5 pagesSensor principle and electrical data for MH-C and MH-C2 magnetic angle sensorsrimmer boyNo ratings yet
- IMI VIB PrecisionAccels - LowResDocument20 pagesIMI VIB PrecisionAccels - LowResAnonymous WDTFw8EKNo ratings yet
- Capteur Angulaire NovotechnikDocument4 pagesCapteur Angulaire NovotechnikLeonorNo ratings yet
- BVB 8207SDDocument2 pagesBVB 8207SDمحمد نصیریNo ratings yet
- Noncontact Temperature Measurement For Industrial Applications & OemsDocument4 pagesNoncontact Temperature Measurement For Industrial Applications & OemsHpnoteNo ratings yet
- Beamex MC2 Brochure ENGDocument12 pagesBeamex MC2 Brochure ENGAngelNo ratings yet
- GF DS SFM3019 D1Document18 pagesGF DS SFM3019 D1Vahan KirakosyanNo ratings yet
- Very Low Differential Pressure TransducerDocument2 pagesVery Low Differential Pressure TransducerFerryNo ratings yet
- Digital Multimeter Operation Manual MODEL: MY-64: ResistanceDocument2 pagesDigital Multimeter Operation Manual MODEL: MY-64: ResistanceWilly FogNo ratings yet
- Auto 339a 0509 LowresDocument2 pagesAuto 339a 0509 LowresTim Stubbs100% (2)
- SES70 Intelligent Earthquake Sensor specificationsDocument4 pagesSES70 Intelligent Earthquake Sensor specificationshafid ganeshaNo ratings yet
- Data Sheet LM301H CRI90 Rev.2.2Document22 pagesData Sheet LM301H CRI90 Rev.2.2HdhdjdNo ratings yet
- Ficha Técnica - Modulo Transmisor It150Document3 pagesFicha Técnica - Modulo Transmisor It150Jhon BaldeonNo ratings yet
- KISTLER 4502a - EnglishDocument8 pagesKISTLER 4502a - EnglishDexter PoliNo ratings yet
- MS5611-01BA03-measurementDocument20 pagesMS5611-01BA03-measurementBogdan JovanovicNo ratings yet
- MT87Document2 pagesMT87Jenalyn Orbasido EvangelistaNo ratings yet
- ZC LoRa Sensor ZCT800ML-S215-SpecificationDocument15 pagesZC LoRa Sensor ZCT800ML-S215-SpecificationHermanRomanNo ratings yet
- 2902851Document9 pages2902851Homer SilvaNo ratings yet
- SEM203P 2PgDocument2 pagesSEM203P 2Pgnemyliv29No ratings yet
- Ecs 2520SMV EcsDocument2 pagesEcs 2520SMV EcsVictor GomesNo ratings yet
- Artemis Artemis: MK Iv MK IvDocument1 pageArtemis Artemis: MK Iv MK IvElettoreNo ratings yet
- HoldPeak Dual Display AC Clamp Multimeter HP-870E User ManualDocument2 pagesHoldPeak Dual Display AC Clamp Multimeter HP-870E User Manualантон успенскийNo ratings yet
- As37 h39b ds100Document10 pagesAs37 h39b ds100Henrik Sandaker PalmNo ratings yet
- Preliminary Datasheet SDP3x-AnalogDocument9 pagesPreliminary Datasheet SDP3x-AnalogVesa RäisänenNo ratings yet
- 03 A 02 ExN 13xx Aufzugtechnik en PDFDocument7 pages03 A 02 ExN 13xx Aufzugtechnik en PDFAnonymous K2uYsqNo ratings yet
- Max31856 PDFDocument30 pagesMax31856 PDFDiego Fernando ArpiNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- SRF ID RTPCR 2238 7001 03608Document2 pagesSRF ID RTPCR 2238 7001 03608nitish mahatoNo ratings yet
- SRF ID RTPCR 2238 7001 03608Document2 pagesSRF ID RTPCR 2238 7001 03608nitish mahatoNo ratings yet
- Important Phone Numbers and Emergency Operation Centre (Eoc) and It'S Contact NumberDocument203 pagesImportant Phone Numbers and Emergency Operation Centre (Eoc) and It'S Contact Numberraj100% (2)
- Adrv 9002Document92 pagesAdrv 9002rajNo ratings yet
- Sdu: Signal Distribution Unit For PPS, 10Mhz and Irig SignalsDocument3 pagesSdu: Signal Distribution Unit For PPS, 10Mhz and Irig SignalsrajNo ratings yet
- Native High-Speed I/O Interfaces: User Guide (UG571)Document71 pagesNative High-Speed I/O Interfaces: User Guide (UG571)rajNo ratings yet
- General Description: Zynq Ultrascale+ Mpsoc Data SheetDocument42 pagesGeneral Description: Zynq Ultrascale+ Mpsoc Data SheetAshokNo ratings yet
- Table A-3. Frequency Hopping Radar Test Waveform Pulse Pulse Hopping Hopping Radar Repetition Pulses Type Width Interval Per Hop Rate Sequence (F.lsec) (J, Lsec) Length (Msec)Document24 pagesTable A-3. Frequency Hopping Radar Test Waveform Pulse Pulse Hopping Hopping Radar Repetition Pulses Type Width Interval Per Hop Rate Sequence (F.lsec) (J, Lsec) Length (Msec)rajNo ratings yet
- Petazzoni Device Tree DummiesDocument45 pagesPetazzoni Device Tree DummiesNelson KigenNo ratings yet
- 20.1 Enabling Internet Over USBDocument4 pages20.1 Enabling Internet Over USBrajNo ratings yet
- Programming With ThreadsDocument17 pagesProgramming With ThreadsrajNo ratings yet
- Lec 20Document19 pagesLec 20rajNo ratings yet
- Kernel UpDocument33 pagesKernel UpelnielNo ratings yet
- 16.1 Kernel - Compilation - StepsDocument1 page16.1 Kernel - Compilation - StepsrajNo ratings yet
- CELF ELC Europe 2009: On Threads, Processes and Co-ProcessesDocument35 pagesCELF ELC Europe 2009: On Threads, Processes and Co-ProcessesrajNo ratings yet
- Make Tutorial: 6.1 SetupDocument9 pagesMake Tutorial: 6.1 SetuprajNo ratings yet
- NEC Students' Chapter Members List 2018-19Document17 pagesNEC Students' Chapter Members List 2018-19rajNo ratings yet
- 2019-08-14-APIGUIHDLFWNAVI Click Thru SLADocument10 pages2019-08-14-APIGUIHDLFWNAVI Click Thru SLArajNo ratings yet
- Ug1283 Bootgen User GuideDocument141 pagesUg1283 Bootgen User GuiderajNo ratings yet
- pg079 Axi TimerDocument37 pagespg079 Axi TimerramukajarrNo ratings yet
- Pci DriversDocument36 pagesPci DriversAxayacatl Alanis NarvaezNo ratings yet
- Lec 31Document23 pagesLec 31rajNo ratings yet
- Software and Hardware Selection Guide ADRV9001 Adrv9001 Software and Hardware Selection GuideDocument2 pagesSoftware and Hardware Selection Guide ADRV9001 Adrv9001 Software and Hardware Selection GuiderajNo ratings yet
- Richard Purdie, Linux FoundationDocument20 pagesRichard Purdie, Linux FoundationrajNo ratings yet
- Pulse Loading Peak ResponseDocument15 pagesPulse Loading Peak ResponserajNo ratings yet
- Abreviations and Acronyms: Abbreviation DescriptionDocument13 pagesAbreviations and Acronyms: Abbreviation DescriptionrajNo ratings yet
- Disclosure To Promote The Right To InformationDocument16 pagesDisclosure To Promote The Right To InformationrajNo ratings yet
- MFC Internals: III IIIDocument13 pagesMFC Internals: III IIIraj100% (1)
- Lec 52Document14 pagesLec 52rajNo ratings yet
- WTL For MFC Programmer PDFDocument192 pagesWTL For MFC Programmer PDFrajNo ratings yet