You might also like
- RespuestasDocument18 pagesRespuestasAndres HerediaNo ratings yet
- Pricing of Zero-Coupon BondsDocument15 pagesPricing of Zero-Coupon BondsKofi Appiah-DanquahNo ratings yet
- Pure Birth ProcessesDocument13 pagesPure Birth ProcessesDaniel Mwaniki100% (1)
- The Black Scholes Model-2Document58 pagesThe Black Scholes Model-2Gladys Gladys MakNo ratings yet
- Review of The Lectures: Euler Method FormulaDocument16 pagesReview of The Lectures: Euler Method Formulakelvin felix garciaNo ratings yet
- Public Finance by BrionesDocument10 pagesPublic Finance by BrionesYnah LopezNo ratings yet
- Activity Analysis of DemandDocument4 pagesActivity Analysis of DemandJulia PunzalanNo ratings yet
- Trade ChecklistDocument5 pagesTrade ChecklistScott Neylon67% (3)
- Finite Difference Method: I I I I I IDocument3 pagesFinite Difference Method: I I I I I IhazemNo ratings yet
- EconometricsDocument20 pagesEconometricsBersabehNo ratings yet
- Dornbsuh Model ExerciceDocument4 pagesDornbsuh Model Exerciceyouzy rkNo ratings yet
- 1 The Cagan Model (OR, 8.2) : D 1 D T T T t+1 TDocument8 pages1 The Cagan Model (OR, 8.2) : D 1 D T T T t+1 TegievsNo ratings yet
- Acite PDFDocument29 pagesAcite PDFConstructif La CritiqueNo ratings yet
- Projects 2Document2 pagesProjects 2Anshuman KumarNo ratings yet
- Brownian Motion, Stochastic Calculus and Ito's Formula Demystified...Document5 pagesBrownian Motion, Stochastic Calculus and Ito's Formula Demystified...Uday BhallaNo ratings yet
- B Splines PDFDocument7 pagesB Splines PDFhello worldNo ratings yet
- Econometrics 1 Slide4bDocument26 pagesEconometrics 1 Slide4byingdong liuNo ratings yet
- Mathematical Modelling and Financial Engineering in The Worlds Stock MarketsDocument7 pagesMathematical Modelling and Financial Engineering in The Worlds Stock MarketsVijay ParmarNo ratings yet
- YD Slides6 PanelDocument50 pagesYD Slides6 PanelJohNo ratings yet
- R I t t-1: C a b R b C ε I a b R R ε R C IDocument16 pagesR I t t-1: C a b R b C ε I a b R R ε R C IАлексей НикифоровNo ratings yet
- SOA Exam MFE Flash CardsDocument21 pagesSOA Exam MFE Flash CardsSong Liu100% (2)
- Assignment 1/ Class Test 1: 5. (MCQ Online) (Online Upload)Document8 pagesAssignment 1/ Class Test 1: 5. (MCQ Online) (Online Upload)Kgotso KgengweNo ratings yet
- Hartono 2003Document18 pagesHartono 2003fransidhasidhara.2021No ratings yet
- Lecture Notes 1 12Document27 pagesLecture Notes 1 12Rich GuyNo ratings yet
- General Renewal Processes: 0 T T T TDocument16 pagesGeneral Renewal Processes: 0 T T T TKrishnaMohanNo ratings yet
- Sample Exam With AnswersDocument4 pagesSample Exam With Answerslimenghan.evaNo ratings yet
- Financial EngineeringDocument3 pagesFinancial Engineeringandrey_dungNo ratings yet
- Mathematic of Growth RatesDocument8 pagesMathematic of Growth RatesMuhammad Bilal A. RNo ratings yet
- Notes (2) On: Rational Expectations and The "New Classical Macroeconomics"Document27 pagesNotes (2) On: Rational Expectations and The "New Classical Macroeconomics"kNo ratings yet
- Project Assignment ReportDocument12 pagesProject Assignment Report5023.65 Andini Vira Salsabilla Z.PNo ratings yet
- MidtermODE (2013)Document8 pagesMidtermODE (2013)osw2002No ratings yet
- Stochastic Calculus II: Brandon LeeDocument8 pagesStochastic Calculus II: Brandon LeealuiscgNo ratings yet
- PAK ERM Supplemental Formula Sheet (Spring 2023)Document32 pagesPAK ERM Supplemental Formula Sheet (Spring 2023)CalvinNo ratings yet
- 1 Math Review: 2.1 Basic DefinitionsDocument6 pages1 Math Review: 2.1 Basic DefinitionsMia GheeNo ratings yet
- Optimal Pairs TradingDocument24 pagesOptimal Pairs TradingSimona AncaNo ratings yet
- Market Models PDFDocument14 pagesMarket Models PDF0612001No ratings yet
- Birth Death ProcessDocument4 pagesBirth Death ProcessDaniel MwanikiNo ratings yet
- Convexity Adjustments and Forward Libor ModelDocument19 pagesConvexity Adjustments and Forward Libor ModelfinenggNo ratings yet
- Problem Set #3 Suggested SolutionsDocument13 pagesProblem Set #3 Suggested SolutionsNeemaNo ratings yet
- Duration Analysis 230919 191834Document25 pagesDuration Analysis 230919 191834davNo ratings yet
- Materi Multi StepDocument28 pagesMateri Multi StepPutu Veri SwastikaNo ratings yet
- EC424 Monetary Economics (Michaelmas Term) Additional QuestionsDocument5 pagesEC424 Monetary Economics (Michaelmas Term) Additional QuestionsSteamPunkNo ratings yet
- Boyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsDocument15 pagesBoyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsAnonymous OrhjVLXO5sNo ratings yet
- Continuous Time Pension Fund ModelingDocument19 pagesContinuous Time Pension Fund ModelingsssskkkkllllNo ratings yet
- Pendulum PDFDocument8 pagesPendulum PDFMohammad AhmerNo ratings yet
- Mainf 517-527Document11 pagesMainf 517-527Upeksha PereraNo ratings yet
- Discrete Model Framework and Binomial Trees 2.1 Basic FormulationDocument11 pagesDiscrete Model Framework and Binomial Trees 2.1 Basic FormulationowltbigNo ratings yet
- D 3 LMM CapsFloorsDocument10 pagesD 3 LMM CapsFloorsJean BoncruNo ratings yet
- Monetary Policy - NotesDocument12 pagesMonetary Policy - NotesPedroNo ratings yet
- Asset Price Dynamics: Fin-40008 Financial Instruments SPRING 2008Document20 pagesAsset Price Dynamics: Fin-40008 Financial Instruments SPRING 2008Raphael NdemNo ratings yet
- Final Topics Fall2015Document2 pagesFinal Topics Fall2015Chan-Ho LeeNo ratings yet
- CompFin 2020 SS QF Sheet 06Document2 pagesCompFin 2020 SS QF Sheet 067 RODYNo ratings yet
- Derivation of The Fokker Planck EquationDocument6 pagesDerivation of The Fokker Planck Equation_nimbleNo ratings yet
- MA 212 Lecture Week3 Part2Document17 pagesMA 212 Lecture Week3 Part2Andy ShawNo ratings yet
- Monetary ModelsDocument19 pagesMonetary ModelsEduardo GuerreroNo ratings yet
- A Few Words On M/E /1/1 Queuing Model With Reneging CustomerDocument7 pagesA Few Words On M/E /1/1 Queuing Model With Reneging CustomerSupriya chowdaryNo ratings yet
- Exploration Vs Exploitation in Stationary Multi-Armed Bandit ProblemsDocument15 pagesExploration Vs Exploitation in Stationary Multi-Armed Bandit ProblemsMichael AngNo ratings yet
- LuceroSanchez Karla M18S3AI6Document3 pagesLuceroSanchez Karla M18S3AI6MarcoAlcantaraEscaMapNo ratings yet
- En Los Problemas 1-4, Evalúe El Límite Dado O Enuncie Que Éste No ExisteDocument3 pagesEn Los Problemas 1-4, Evalúe El Límite Dado O Enuncie Que Éste No Existeharold reyes fuentesNo ratings yet
- DSP - Classification of CT SignalsDocument8 pagesDSP - Classification of CT SignalsJunaid KaleemNo ratings yet
- Building A Smooth Yield Curve: Email: Jgreco@math - Uchicago.eduDocument23 pagesBuilding A Smooth Yield Curve: Email: Jgreco@math - Uchicago.eduGeorge LiuNo ratings yet
- Lecture-5 Performance of Feedback Control SystemsDocument101 pagesLecture-5 Performance of Feedback Control SystemsHeba FarhatNo ratings yet
- Alesina Austerity PDFDocument14 pagesAlesina Austerity PDFArjun KapoorNo ratings yet
- Alesina Murard Rapoport Feb2020Document58 pagesAlesina Murard Rapoport Feb2020Arjun KapoorNo ratings yet
- Alesina-Geoim Africa Revision MainDocument42 pagesAlesina-Geoim Africa Revision MainArjun KapoorNo ratings yet
- Sept 6, 2019 Alberto Alesina, Davide Furceri, Jonathan D. Ostry, Chris Papageorgiou and Dennis P. QuinnDocument54 pagesSept 6, 2019 Alberto Alesina, Davide Furceri, Jonathan D. Ostry, Chris Papageorgiou and Dennis P. QuinnArjun KapoorNo ratings yet
- A Practical Approach To Data Science: CSCI E-84Document51 pagesA Practical Approach To Data Science: CSCI E-84Arjun KapoorNo ratings yet
- Market IntegrationDocument4 pagesMarket IntegrationOrlando UmaliNo ratings yet
- Economic Development by FajardoDocument4 pagesEconomic Development by FajardoDandrave LebigaNo ratings yet
- Barilla SpA - CaseDocument10 pagesBarilla SpA - CaseSergey Ter100% (1)
- CWTSP 4.8 03-18-20 at 103 - 2017.05.02Document1 pageCWTSP 4.8 03-18-20 at 103 - 2017.05.02pempekplgNo ratings yet
- Luigi Bradizza (Auth.) - Richard T. Ely's Critique of Capitalism-Palgrave Macmillan US (2013)Document249 pagesLuigi Bradizza (Auth.) - Richard T. Ely's Critique of Capitalism-Palgrave Macmillan US (2013)José Miguel AhumadaNo ratings yet
- DISSDocument134 pagesDISSEllie BellyNo ratings yet
- The Conservative 04Document47 pagesThe Conservative 04Francesca PadoveseNo ratings yet
- MCQsDocument11 pagesMCQs19101977No ratings yet
- Teaching PowerPoint Slides - Chapter 1Document26 pagesTeaching PowerPoint Slides - Chapter 1Aditya Majumder100% (1)
- Htt313 - Chapter 3Document24 pagesHtt313 - Chapter 3Nur AliaaNo ratings yet
- Trust Me, I'm Your Private Banker: Financial ServicesDocument12 pagesTrust Me, I'm Your Private Banker: Financial ServiceskaiuskNo ratings yet
- Advanced Portfolio Management Finals CheatsheetDocument2 pagesAdvanced Portfolio Management Finals CheatsheetKoh ziyangNo ratings yet
- MU EntreprunershipDocument21 pagesMU EntreprunershipDejen GebreyohannesNo ratings yet
- Chapter Five Regulation of Financial Markets and Institutions and Financial InnovationDocument22 pagesChapter Five Regulation of Financial Markets and Institutions and Financial InnovationMikias DegwaleNo ratings yet
- Chapter 6 - (23) - 220313 - 123559Document101 pagesChapter 6 - (23) - 220313 - 123559Celine Clemence胡嘉欣No ratings yet
- Serendipity - Designing For Sustainability-1Document2 pagesSerendipity - Designing For Sustainability-1shankarNo ratings yet
- Cochrane Notes Week 3Document24 pagesCochrane Notes Week 3coolaclNo ratings yet
- Eco 245Document6 pagesEco 245Great fareNo ratings yet
- This Study Resource Was: InstructionsDocument3 pagesThis Study Resource Was: InstructionsRama fauziNo ratings yet
- ECON 201 Final Study Guide F08Document2 pagesECON 201 Final Study Guide F08ShyamNo ratings yet
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - GLOBALIZACION Y COMPETITIVIDAD - (GRUPO B01)Document7 pagesEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - GLOBALIZACION Y COMPETITIVIDAD - (GRUPO B01)liliana rinconNo ratings yet
- Viet Anh LE - Assessment 2 Assignment - BUSN 1013Document11 pagesViet Anh LE - Assessment 2 Assignment - BUSN 1013Viet VivuNo ratings yet
- Chapter 7 - FDIDocument29 pagesChapter 7 - FDIsuriakumaranNo ratings yet
- Questionnaire To DealersDocument6 pagesQuestionnaire To DealersprazgnaNo ratings yet
- Creating Brand Equity-Session 9Document10 pagesCreating Brand Equity-Session 9Haris AlviNo ratings yet
- Chapter 6 Macro EconomicsDocument60 pagesChapter 6 Macro EconomicsFalguni ShomeNo ratings yet
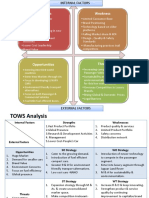
- Tata Motors SWOT TOWS CPM MatrixDocument6 pagesTata Motors SWOT TOWS CPM MatrixTushar Ballabh50% (2)