You might also like
- Chromatography of Amino AcidsDocument2 pagesChromatography of Amino AcidsSunanda ThompsonNo ratings yet
- Single-Phase Induction Motor - Double Field Revolving Theory - Electrical Machines IIIDocument4 pagesSingle-Phase Induction Motor - Double Field Revolving Theory - Electrical Machines IIIpradhapdNo ratings yet
- How Internet Infrastructure WorksDocument6 pagesHow Internet Infrastructure WorksAbhishek GavandeNo ratings yet
- Analysis of Peace Agreements With Militants by Sohail Habib TajikDocument20 pagesAnalysis of Peace Agreements With Militants by Sohail Habib TajikAamir MughalNo ratings yet
- Demultiplexer AssignmentDocument4 pagesDemultiplexer AssignmentMuhammad ParasNo ratings yet
- Exper-8 Multiplexer and DemultiplexerDocument2 pagesExper-8 Multiplexer and DemultiplexerMohammed Dyhia Ali100% (1)
- Starting Methods of 1-Phase & 3-Phase IMs - 100255KDocument14 pagesStarting Methods of 1-Phase & 3-Phase IMs - 100255KChamath Kirinde100% (2)
- Starting Methods of IMDocument24 pagesStarting Methods of IMChamila SumathiratnaNo ratings yet
- Chapter 7 - Internet and The WebDocument42 pagesChapter 7 - Internet and The WebCelyn Anne Jati EkongNo ratings yet
- First Order Linear PDE Questions and Answers - SanfoundryDocument9 pagesFirst Order Linear PDE Questions and Answers - Sanfoundrycode with joeyNo ratings yet
- Advances in Data Storage TechnologyDocument18 pagesAdvances in Data Storage TechnologySuresh31179No ratings yet
- Machakos County Integrated Development Plan 2018 2022 2 PDFDocument461 pagesMachakos County Integrated Development Plan 2018 2022 2 PDFmeja samwelNo ratings yet
- Anatomy of A Software HouseDocument13 pagesAnatomy of A Software HouseFaizan Shah Ahmad0% (1)
- QAch 15Document33 pagesQAch 15El Basmala100% (1)
- Electronic Engineering Final Year Project Progress2Document17 pagesElectronic Engineering Final Year Project Progress2Asher JoshuaNo ratings yet
- Reasons U.S. Women Have AbortionsDocument10 pagesReasons U.S. Women Have AbortionsMax MaxwellNo ratings yet
- Probability Mass Function - PMFDocument3 pagesProbability Mass Function - PMFAlvinaNo ratings yet
- Kampyle Salesforce IntegrationDocument13 pagesKampyle Salesforce Integrationvenkatesh4sptNo ratings yet
- Making Devolution Work for Service Delivery in KenyaFrom EverandMaking Devolution Work for Service Delivery in KenyaRating: 5 out of 5 stars5/5 (1)
- What Are The Difference Between Hub and SwitchDocument10 pagesWhat Are The Difference Between Hub and SwitchSameer HussainNo ratings yet
- Architecture and Computer Organization Part 13.3 Virtual MemoryDocument9 pagesArchitecture and Computer Organization Part 13.3 Virtual MemoryAnthony van IngeNo ratings yet
- Principles of Programming Languages: Syntax AnalysisDocument51 pagesPrinciples of Programming Languages: Syntax AnalysismrbkiterNo ratings yet
- Database Management System (IT601) PDFDocument2 pagesDatabase Management System (IT601) PDFSOMANTH KHANRANo ratings yet
- Quiz Lipids and LipoproteinsDocument9 pagesQuiz Lipids and LipoproteinsAllyah Ross DuqueNo ratings yet
- Object Oriented Analysis and DesignDocument3 pagesObject Oriented Analysis and DesignRowan Joseph100% (1)
- Syntax AnalysisDocument46 pagesSyntax Analysissyeda rabia50% (2)
- Active FiltersDocument48 pagesActive FiltersAbdullah GubbiNo ratings yet
- Topic - Three-Phase Diode Rectifiers (Compatibility Mode)Document33 pagesTopic - Three-Phase Diode Rectifiers (Compatibility Mode)raadawad100% (1)
- Experiment 2 ChromatographyDocument3 pagesExperiment 2 ChromatographyChacha Mercado0% (1)
- Homework - 2 Hubs and SwitchingDocument15 pagesHomework - 2 Hubs and SwitchingLognodesNo ratings yet
- Reimagining Peacemaking: Women's Roles in Peace ProcessesDocument42 pagesReimagining Peacemaking: Women's Roles in Peace ProcessesOffice of the Presidential Adviser on the Peace ProcessNo ratings yet
- Caribbean Construction Planning v6Document16 pagesCaribbean Construction Planning v6Demar HutchnsonNo ratings yet
- Rural HousingDocument18 pagesRural HousingPinaki MohantyNo ratings yet
- Cooperative SocietiesDocument6 pagesCooperative SocietiesMadhura KhapekarNo ratings yet
- Database AssignmentDocument16 pagesDatabase AssignmentbobsekoNo ratings yet
- Virtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarDocument32 pagesVirtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarAnkit SinghNo ratings yet
- The Classical Models of Social MovementDocument6 pagesThe Classical Models of Social MovementVioline John ShannieNo ratings yet
- Operating System Short Questions and AnswersDocument62 pagesOperating System Short Questions and Answerscontactmenoop40% (5)
- EUBP Facts and Figures PDFDocument16 pagesEUBP Facts and Figures PDFTino RodriguezNo ratings yet
- Lab Manual Bio560Document28 pagesLab Manual Bio560aisha zahariNo ratings yet
- Homework 6 TCDocument17 pagesHomework 6 TCSebastián TorresNo ratings yet
- Figure 1 Process Under ControlDocument9 pagesFigure 1 Process Under ControlKajalNo ratings yet
- Dynamical System ModelDocument47 pagesDynamical System ModelYeimy QuevedoNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- 1) 1 Order Systems Parameter Changes (K and A)Document9 pages1) 1 Order Systems Parameter Changes (K and A)Ali El-GazzarNo ratings yet
- Types of ControllersDocument4 pagesTypes of ControllersJamesNo ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkDocument25 pagesCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Lcs Unit 1 PDFDocument30 pagesLcs Unit 1 PDFRajasekhar AtlaNo ratings yet
- Automated Control Resumen Unidd IVDocument23 pagesAutomated Control Resumen Unidd IVRakgnar LodbrokNo ratings yet
- P Pi ControllerDocument4 pagesP Pi ControllerYawar AbbasNo ratings yet
- Topic 1: Introduction To Control System and Mathematical ReviewDocument43 pagesTopic 1: Introduction To Control System and Mathematical ReviewFaez FeakryNo ratings yet
- Ec3351 Control SystemsDocument18 pagesEc3351 Control SystemsParanthaman GNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- ReportDocument15 pagesReportsaad hussainNo ratings yet
- Control Systems NotesDocument152 pagesControl Systems Notesdarlachantisaideepthi450No ratings yet
- 12E2013Document152 pages12E2013Hasan Qayyum ChohanNo ratings yet
- University of Wah Application FormDocument7 pagesUniversity of Wah Application FormHasan Qayyum ChohanNo ratings yet
- PM&DC-FORM-2 Renewal of Name On The Register Of: (Fill in With Block Letters)Document2 pagesPM&DC-FORM-2 Renewal of Name On The Register Of: (Fill in With Block Letters)Hasan Qayyum Chohan0% (1)
- New Wordpad DocumentDocument1 pageNew Wordpad DocumentHasan Qayyum ChohanNo ratings yet
- 500 Thiết bị điện Mi17Document92 pages500 Thiết bị điện Mi17Duy Khanh NguyễnNo ratings yet
- Product Specifications: VHLP1 13 3WHDocument4 pagesProduct Specifications: VHLP1 13 3WHmdisicNo ratings yet
- Electro Magnetic Theory Anna University Nov Dec Question PaperDocument3 pagesElectro Magnetic Theory Anna University Nov Dec Question PaperBenish CmNo ratings yet
- Chapter - 1 1.1 Traffic Congestion System: Density Based Traffic Signal Control Sytem and Ambulance DetectionDocument33 pagesChapter - 1 1.1 Traffic Congestion System: Density Based Traffic Signal Control Sytem and Ambulance DetectionMADDHEPALLY MOUNIKANo ratings yet
- Plano Eléctrico r1600Document13 pagesPlano Eléctrico r1600Maria Isabel Alzate RamirezNo ratings yet
- Modeling The Time-to-Corrosion Cracking of The Cover Concrete in Chloride Contaminated Reinforced Concrete StructuresDocument128 pagesModeling The Time-to-Corrosion Cracking of The Cover Concrete in Chloride Contaminated Reinforced Concrete StructuresSofía Córdoba SáenzNo ratings yet
- Hookup and Installation InstructionsDocument71 pagesHookup and Installation InstructionsRobalsinghNo ratings yet
- Important Questions For Class 12 Physics Chapter 7 Alternating Current Class 12 Important Questions - Learn CBSEDocument70 pagesImportant Questions For Class 12 Physics Chapter 7 Alternating Current Class 12 Important Questions - Learn CBSEvelayudhanshree03No ratings yet
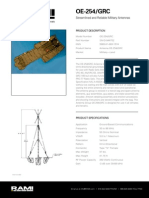
- Rami Mil Oe-254-GrcDocument1 pageRami Mil Oe-254-Grcspidermandude87No ratings yet
- Analysis of Linearly Polarized ModesDocument6 pagesAnalysis of Linearly Polarized ModesHarry Ramza100% (1)
- 218.wireless Power Transfer by High Frequency Resonating CoilsDocument1 page218.wireless Power Transfer by High Frequency Resonating CoilsANAND KRISHNANNo ratings yet
- Inverter - SMA - Datasheet - SB3.0-7.7-US Data Sheet-En-41Document4 pagesInverter - SMA - Datasheet - SB3.0-7.7-US Data Sheet-En-41AlNo ratings yet
- Catalogo IndoAsian Switch DisconnectorsDocument8 pagesCatalogo IndoAsian Switch DisconnectorsjackiwongzNo ratings yet
- The MEN Wiring System PDFDocument1 pageThe MEN Wiring System PDFThananuwat SuksaroNo ratings yet
- Solar PCU Inverter Three Phase PDFDocument2 pagesSolar PCU Inverter Three Phase PDFHarish Kumar GNo ratings yet
- Maestro Servo Motor Gate Dz-01: Technical Parameter ListDocument2 pagesMaestro Servo Motor Gate Dz-01: Technical Parameter ListIlya PamuntjakNo ratings yet
- Instalacion Speakers Serie 49 579-1190Document4 pagesInstalacion Speakers Serie 49 579-1190Daliana Patricia CayamaNo ratings yet
- Fanuc-Page-6 (Al SP, Servo, Sytem, PS,)Document17 pagesFanuc-Page-6 (Al SP, Servo, Sytem, PS,)Hoangvinh DuongNo ratings yet
- ESD Basics: Basic Concepts in Electrostatic Discharge (Esd)Document27 pagesESD Basics: Basic Concepts in Electrostatic Discharge (Esd)Zahid ShahNo ratings yet
- BD707/709/711 BD708/712: Complementary Silicon Power TransistorsDocument7 pagesBD707/709/711 BD708/712: Complementary Silicon Power TransistorsGheorghe DanielNo ratings yet
- Colortran 2kW Focusing Scoop Spec Sheet 1995Document2 pagesColortran 2kW Focusing Scoop Spec Sheet 1995Alan MastersNo ratings yet
- BE 1st Midterm Sep2009Document3 pagesBE 1st Midterm Sep2009YASHNo ratings yet
- 3.3 Analysing Electromagnetic InductionDocument27 pages3.3 Analysing Electromagnetic InductionEmil HelmiNo ratings yet
- ProTec CatalogDocument68 pagesProTec Catalogkenlavie2No ratings yet
- NBTV Sync Separator and Video Pre-Amplifier: Simplified DiagramDocument3 pagesNBTV Sync Separator and Video Pre-Amplifier: Simplified Diagramarond5318No ratings yet
- ARC 200 Operating ManualDocument30 pagesARC 200 Operating ManualAmbar Solange100% (1)
- Asco Series 044 Gas Shutoff CatalogDocument4 pagesAsco Series 044 Gas Shutoff CatalogyolepusaNo ratings yet
- Magnetostatic Field (Steady Magnetic)Document44 pagesMagnetostatic Field (Steady Magnetic)ridwanto12No ratings yet
- Electrically Short AntennasDocument110 pagesElectrically Short AntennasKontojNo ratings yet
- 20kW SolarDocument2 pages20kW SolarMoe SanNo ratings yet