You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Power Sector Overview in India - EARTHING DESIGN CALCULATIONDocument3 pagesPower Sector Overview in India - EARTHING DESIGN CALCULATIONnavneetNo ratings yet
- Arpa Radar - Vision Master - Arpa Radarchart Radar - Ship's Manual Volume 1 (Installation, Servicing & Maintenance) PDFDocument568 pagesArpa Radar - Vision Master - Arpa Radarchart Radar - Ship's Manual Volume 1 (Installation, Servicing & Maintenance) PDFCarlos Eduardo Galvão100% (1)
- BB ProtectionDocument38 pagesBB ProtectionMOHAMED KHAMIS0% (1)
- RFMD.: CATV Hybrid Amplifier Modules: Past, Present, FutureDocument21 pagesRFMD.: CATV Hybrid Amplifier Modules: Past, Present, FutureSanthosh MechNo ratings yet
- Full Chip Level Implementation of Reed Solomon Encoder: Amar Narayan, Sheetal Belaldavar, VenkateshappaDocument4 pagesFull Chip Level Implementation of Reed Solomon Encoder: Amar Narayan, Sheetal Belaldavar, VenkateshappaSumanth VarmaNo ratings yet
- DSP For Matlab and LabVIEWDocument213 pagesDSP For Matlab and LabVIEWAmaniDarwishNo ratings yet
- Panasonic Ey7440 Manual de Usuario Páginas 10 12Document3 pagesPanasonic Ey7440 Manual de Usuario Páginas 10 12Mr. Gonza M.No ratings yet
- Understanding Underground Electric Transmission CablesDocument3 pagesUnderstanding Underground Electric Transmission CablesSeindahNyaNo ratings yet
- Datasheet Solis Solar Inverter 5g Three Phase 80kw 110kw IndiaDocument2 pagesDatasheet Solis Solar Inverter 5g Three Phase 80kw 110kw IndiaAdriano J. P. NascimentoNo ratings yet
- QC-PDS Ordering HandbookDocument16 pagesQC-PDS Ordering HandbookMikael BogrenNo ratings yet
- Startup Resolutions For 1000BASE-T: Sailesh K. Rao Level One Communications, IncDocument19 pagesStartup Resolutions For 1000BASE-T: Sailesh K. Rao Level One Communications, IncUdit KumarNo ratings yet
- Nema TR-1Document27 pagesNema TR-1Adella LowNo ratings yet
- CH 10Document45 pagesCH 10hjhjhj ghhjhNo ratings yet
- 02 CT10782EN03GLA0 Flexi WCDMA BTS and Module Overview RU40 PDFDocument142 pages02 CT10782EN03GLA0 Flexi WCDMA BTS and Module Overview RU40 PDFFilDeLaVieNo ratings yet
- Altek: Frequency Source Model 40ADocument2 pagesAltek: Frequency Source Model 40ALeonardoNo ratings yet
- 1.7 Description of Logic Nodes: Programmable Logic P54X/En Pl/K74 Micom P543, P544, P545, P546 (PL) 7-15Document32 pages1.7 Description of Logic Nodes: Programmable Logic P54X/En Pl/K74 Micom P543, P544, P545, P546 (PL) 7-15pgcilNo ratings yet
- Investigations On Three-Phase Transmission LinesDocument6 pagesInvestigations On Three-Phase Transmission LinesandresNo ratings yet
- Module 1 EPGT NotesDocument14 pagesModule 1 EPGT NotesYashwin.v YashuNo ratings yet
- Assignment 3: Spring 2020Document7 pagesAssignment 3: Spring 2020kant734No ratings yet
- Quick Revision Physics 2022-2023Document27 pagesQuick Revision Physics 2022-2023kumarikrisha70No ratings yet
- 15 HLK 7688A UserMan r2 3260945Document12 pages15 HLK 7688A UserMan r2 3260945bui tien manhNo ratings yet
- Physics Revision Notes Term 1Document6 pagesPhysics Revision Notes Term 1prachi guptaNo ratings yet
- Digital Signal Processing Lab ManualDocument37 pagesDigital Signal Processing Lab ManualVishurockNo ratings yet
- Simbologia Electrica GroveDocument14 pagesSimbologia Electrica GroveAngel DlsgNo ratings yet
- All Faculty Schedule FALL2018 UIT TimetableDocument84 pagesAll Faculty Schedule FALL2018 UIT TimetableMuhammad UmairNo ratings yet
- An Efficient Brute-Force Solution To The Network Reconfiguration ProblemDocument5 pagesAn Efficient Brute-Force Solution To The Network Reconfiguration ProblemYashveer TakooryNo ratings yet
- Measurement of Phase Difference Using DSP Algorithms by Non-Coherent SamplingDocument6 pagesMeasurement of Phase Difference Using DSP Algorithms by Non-Coherent Samplingfaroo28No ratings yet
- Electrical Design of High-Speed Induction Motors of Up To 15 MW and 20000 RPMDocument7 pagesElectrical Design of High-Speed Induction Motors of Up To 15 MW and 20000 RPMzachxie100% (1)
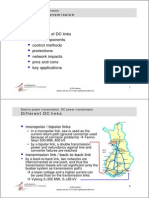
- Topics: Principles of DC Links Main Components Control Methods Protections Network Impacts Pros and Cons Key ApplicationsDocument16 pagesTopics: Principles of DC Links Main Components Control Methods Protections Network Impacts Pros and Cons Key Applicationselvaz1973No ratings yet
- Gree DehumiDocument1 pageGree DehumiAnkhi BaroiNo ratings yet