Bandwidth, Sample rate, and Latency
-Michael Ali, x4278
1.0 Introduction
"Bandwidth", "samy J” ™ e
de iple rate", and "latency" are common terms used to describe control
system parameters. We use them often in robotics to specify i
Ke ch ee sath fy characteristics that we feel a system
. ;, sometimes these terms are used incorrectly. This
a : . ly. This paper
tempts to address the issue of defining these terms and how they should be applied during a study
‘of robot control systems. There are some major limitations to applying the analyses in this paper to
robot control systems. Robots are multivariable, non-linear dynamic systems. Most of the terms
in this paper really apply to linear single-input, single-output systems. For example: what is the
bandwidth’ of a multivariable system? Clearly there are several depending on the variable of
interest, The non-linearity of the robot dynamics also makes defining a single bandwidth’ difficult
since the response depends on the configuration of the robot. Keeping the above caveats in mind,
the rest of this paper deals with defining the terms bandwidth, sample rate, and latency, and the
relationships between them.
+2. Bandwidth [Reference: Principles of Feedback Control Systems]
2.1 Definition
‘One of the most often used (and abused) terms in control system analysis is bandwidth. There are
actually several definitions of "bandwidth" only one of which is appropriate for our use. The
bandwidth of a system is «g, where (Figure 1):
«9g = the location on phase response plot where the phase lag is -1 radian (or-57°)
In the time domain (gis approximately the inverse’ of the delay time (Tg) the time it takes for the
‘output to reach half the magnitude of the commanded value (figure 2). Time delay is a key
parameter wth control systems. Time delay defines dynamic error, which is what we are tying {©
minimize. Therefore the definition of bandwidth that corresponds to time delay is the most
appropriate fr these systems. As shown in ection 4+ this definition also allows a straightforward
relationship between latency and bandwidth.
2.2 Other definitions of system bandwidth
2.2.1 Closed loop magnitude response
Bandwidth is sometimes defined as the "3 4B down" point on a magnitude vs. frequency
diagram of the closed loop response (Figure 3). This is the frequency at which the magnitude of the
output is 3 dB lower than the magnitude of the input. ‘This bandwidth is referred to the
Sch TAR cn iain aaa
Phase (ed
Angular teauency wg seal)
Response
\ Rise tie Ty
\ Time
Figure &@B2. Typical transient response of feedback-contrl system, which defines rise
time Ty and delay time T,
Fisuce 3
‘
Reprinted urthont permission From “Principles of FB Cental Systems”
“half-power" frequency, @},ysbecause 3 dB down is equivaligent to the signal decreasing to 0.707
of the zero frequency magnitude. This frequency is propotional to the inverse of the rise time of the
system (T,) -- the time it takes for the output to go from 10% to 90% of the desired output (figure
2). This bandwidth is important to communications engineers because it reflects the fidelity of the
‘output signal tothe input signal. T, and @}, generally have no relationship to Ty and a,
2.2.2 Open loop magnitude response
Bandwidth is sometimes defined as the "3 db down" point on a magnitude vs. frequency
diagram of the open loop response. This is the frequency at which the magnitude of the output is 3,
4B lower than the magnitude of the input. For most linear systems, it can be shown that this
bandwidth is equivalent to @ above. However, for systems with latencies (which are the kind we
work with), this relation does not hold. This is because the exponential term that represents the
delay has a magnitude of unity so it does not affect the magnitude response, but it definitely affects
the phase response.
3.0 Sample rate
3.1 Definition
‘Sample rate is the rate at which the inputs are sampled and the outputs computed.
3.2 Sample rate and bandwidth
‘The sample rate limits the bandwidth of the system to 1/2 of the sample rate (Nyquist
criterion). This is usually an upper limit since other considerations such as plant dynamics typically
limit the bandwidth of the system.
4.0 Latency
There are many ways that latency can develop in a system. The classical control example is
controlling the temperature of the water in a tank via adding hot water. In this example, the valve
that controls the amount of hot water added is separated from the tank by a pipe. This pipe adds a
delay between the control signal (the addition of hot water) and the response (the temperature of the
tank). Classical control theory shows that these systems are difficult to control. In robotics
applications latency typically arises due to the use of multiple computers.
First we examine the usual model of a digital control system (figure 4). One computer
‘controls everything. There are no latencies other that those of the plant in this setup. Now we shift
to the situation we normally find in robotics. We now have multiple computers separating the
application of the input from the detection of the output (figure 5). One good example of this is the
teleop system proposed for DTF-1, and the setup we have in the lab. For the following discussion
please refer to figure 6. We assume that the main control loop is being run in computer #1.
‘Computer #2 has the 1/0 capability. The computers communicate via some mechanism with a
transmission time of Ty;. ‘These computers are run one of two ways-- asynchronously or
‘computer
comman
ang filter D/A Plant putqut
Figure 4. A textbook digital control loop
command output
computer] computer computer
= a me Plant
computer]
#4
Figure 5. A multicomputer digital control loop
command
output
computer]
2)
computer
2
Figure 6. A dual computer control loop
=
synchronously. When asynchronous, the time it takes for the output of the first computer to be
acted on by the second is random. ‘The worst case time is the transmission time (Ty,) plus 2x the
sample time (T.,p) of the second computer. Similarly, the time it takes for the second computer to
send the sensor data back to the first computer is Ty, + 2T,. One proposed solution to this,
problem is to organize the computers so that they operate synchronously. Computer #1 sends its
data to computer #2. Computer #2 has been waiting for the data and immediately transforms it and
sends it to the plant. It then reads the sensor(s). This data is passed back to computer #1
‘Computer #1 immediately reads the data and computes the next output, and the cycle continues.
The latency has now been reduced to Ty, in both the forward and feeback loops (assuming
negligible A/D conversion time in computer #2). One variation on this is a situation where
computer #1 and computer #2 communicate by trading buffers-- when computer #1 sends its,
command data, computer #2 sends it previously sampled sensor data. In this case, the forward
latency is Ty, and the feedback latency is Ty, + Tso.
4.1 Latency and "around-the-loop-time"
‘Around the loop time is the time from the computation and transmission of the control output
to the reception of the sensor signal reflecting the output. For an analog control system the
"around-the-loop" time is zero (or the speed of the electronics). For a one computer digital control
system, "around-the-loop" time is the sample time. Given this definition, the around-the-loop-time
of the system is equal to the sample time plus the sum of the latencies.
4.2 Latency and sample rate
‘Sample rate and latency are independent, and must be specified separately.
4.3 Latency and bandwidth
Latency in the forward part of the control loop clearly adds a time delay between the
command and the output. This latency sets an upper bound on the bandwidth of the system, using
the definition of bandwidth in section 2.1. This direct relationship between bandwidth and latency
is the main advantage of using definition 2.1. ‘The effect of latency in the feedback loop is more
complicated since the data is a funtion of the plant and environment. In addition, the control law
transforms the feedback data in order to produce an output. The latency in the feedback loop
doesn't have as much a direct effect on the delay time as much as it effects the stability and
overshoot of the system.
5.0 Summary
‘The bandwidth of the system is the frequency at which the phase response drops 1 radian
behind a sinusoidal input. In the time domain, this corresponds approximately to the inverse of the
time delay of the system. The bandwidth is a function of the controller, the plant dynamics, the
sample rate, and the latency of the entire system. ‘The sample rate sets an upper bound on the
bandwidth of the system as does latency in the forward control loop. Latency in the feedback loop
effects stability and overshoot.
7.0 Further Research
One of the implications of [Brooks, 1990] is that is possible to partition the design and
specifications of the teleoperator system into two parts -- a relatively low bandwidth forward
position loop and a high bandwidth force feedback loop. As discussed above, the appropriate
definiton of bandwidth for the position loop is @,. For the feedback loop, however, the fidelity of
the returned signal is important. In this case the bandwidth defined as hp (section 2.2.1) might be
‘more appropriate, Latency must still be minimized in the feedback path, so latency should also be
specified. ‘These are topics for further research.
8.0 References
Author, Unknown, "Principles of Feedback Control Systems: Vol I”
Brooks, Thurston, "Telerobot Response Requirements", STX Report # STX/ROB/90-03
Appendix A. Sample Analyses
Example 1: FTS analysis
In the report entitled "Telerobot Response Requirements”, Thurston Brooks makes the argument
that a typical teleoperated system requires a master to slave bandwidth of 5 Hz. I will assume this
bandwidth is «, as defined in section 2.1, and proceed to find the necessary bandwidth for the
slave robot (in this case, DTF-1). In order to do this I will assume that the latency in the system
due to Martin's hardware configuration is 5 ms. The latency arises from the time required to send
the command from the Kraft to the SDP, and from the SDP to the DUMPS processors in the arm.
‘We first compute the phase lag due to the latency:
Statency = “28 (5 Hz) (Sms) = 05m =-0,157 radians
In order to achieve a bandwidth of 5 Hz, the phase lag at 5 Hz must be less than or equal to -1
radian, This means that the slave arm may have up to -1 - (-.157) = -0.85 radians of lag at 5 Hz.
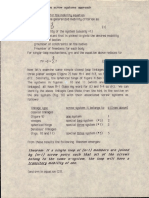
Assuming that the arm exhibits a critically-damped second order response we see from figure A.1
that the required bandwidth for the slave would be (.55/.45)*5Hz=6 Hz. Figure A.1 also shows
that @ is .55 of the natural frequency @,. The natural frequency is a function of the motor
constants, gear ratios, and inertias. ‘Therefore knowledge of @, can guide selection of these
parameters.
Note that in this example the sample rate enters the calculations implicitly during the use of
figure A.1. If the sample rate is greater than 15-20 times the system natural frequency, the digital
control system can be analyzed as if it were a continuous system. Figure A.1 are the curves for a
continous system. If the sample rate is not high enough, a curve for the desired sample rate would
have to be generated and the analysis done using it. Since the zero order hold typically used with
digital control systems essentially adds phase lag, we would expect the bandwidth to drop with
decreasing sample rate.
Example 2, The proposed setup for the Engineering Testbed (ETB)
In this case we are given the robot (the RRC arm). We want to find what the expected master-slave
bandwidth will be. The latency from the Kraft to the Multibus II bucket is about 10 ms. The
latency from the MBII to the D/A converters on the MBI is about 2.5 ms (assuming we use RRC’s
386 board in the MBI with their software). The total forward loop latency is 12.5 ms. The RRC
arms can move a 50 Ib load 8 feet in about 1 second. This should be the slowest speed. The delay
time Tg. slave is therefore 0.5 seconds. Adding the latency to this we get the master-slave system
delay time: Tq. system =-5125 ms. The bandwidth = 1/Tq.system = 1.95 Hz.
Eq, (8-24) contains
sd without factoring:
Cy)" as
vues of w the low-
2 4B. For very high
0 dB/decade. The
\ibited in the vicinity
fore there may be a
straight-line asymp-
ral values of { <1is
aced directly on the
Fig. 8-4,
's with £ At zero
ele is 90°, and at
or various values of
curves, or enough
Fig. 8-4. When the
es of the log mag-
xcept that they are
1k value. The mag-
"ours are important
ed in Sec. 9.3, are
(827)
6-28)
ratio
herefore the curve
for ¢<0.707. The
the damping ratio
tion is used when
ics. These charac-
FREQUENCY RESPONSE 265,
°
0
e { |
Res
ee 49° (--85 rad)
¥ -57° (-l rad)
oie ican
i | | z
Ree
8 he 1 4
€ dE TINK }
- 120"
=} — . +
tes z . 40"
20 HIT
| aa
15 ; See | 160
i
ara aap fas 8
Al es
Figure $e Log magnitude and phase diagram for {1+ [Zee + (olan)
jum-phase factors»However, the
she ta err
ive, the quadratic factor of
phase teritelts angle varies me
You might also like
- Remote Tracking of Robot Executing A Straight Line Motion January 1986Document9 pagesRemote Tracking of Robot Executing A Straight Line Motion January 1986msa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Part IVDocument6 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Part IVmsa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Part IIDocument8 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Part IImsa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Backup BDocument3 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Backup Bmsa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Part IIIDocument7 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Part IIImsa83No ratings yet
- Light Intensifier Project Report 1 - 8 - 83Document19 pagesLight Intensifier Project Report 1 - 8 - 83msa83No ratings yet
- MAE 421 Project 11 - 19 - 82Document19 pagesMAE 421 Project 11 - 19 - 82msa83No ratings yet
- Integrated Approach To Model-Based Systems Engineering and Object-Oriented Software EngineeringDocument10 pagesIntegrated Approach To Model-Based Systems Engineering and Object-Oriented Software Engineeringmsa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Backup ADocument3 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Backup Amsa83No ratings yet
- A Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 1 PDFDocument12 pagesA Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 1 PDFmsa83No ratings yet
- Discrete Regrasp Planning For Multifingered Robot Hands Part IDocument7 pagesDiscrete Regrasp Planning For Multifingered Robot Hands Part Imsa83No ratings yet
- Kinematics Mobility Criterion Part IIBDocument1 pageKinematics Mobility Criterion Part IIBmsa83No ratings yet
- Captain America and Battlestar, Some HistoryDocument3 pagesCaptain America and Battlestar, Some Historymsa83No ratings yet
- A Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 3Document9 pagesA Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 3msa83No ratings yet
- A Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 2 PDFDocument13 pagesA Closed Loop Robot Control System Using The Polaroid Ultrasonic Sensor Part 2 PDFmsa83No ratings yet
- Kinematics Mobility Criterion Part IDocument5 pagesKinematics Mobility Criterion Part Imsa83No ratings yet
- Kinematics Mobility Criterion Appendix Part BDocument4 pagesKinematics Mobility Criterion Appendix Part Bmsa83No ratings yet
- Model Based Systems Engineering ExamplesDocument14 pagesModel Based Systems Engineering Examplesmsa83No ratings yet
- Anthrobot-2: System Description DocumentDocument20 pagesAnthrobot-2: System Description Documentmsa83No ratings yet
- Kinematics Mobility Criterion Part IVDocument10 pagesKinematics Mobility Criterion Part IVmsa83No ratings yet
- Kinematics Mobility Criterion Part IIADocument7 pagesKinematics Mobility Criterion Part IIAmsa83No ratings yet
- Kinematics Mobility Criterion Appendix Part ADocument2 pagesKinematics Mobility Criterion Appendix Part Amsa83No ratings yet
- The OHTE Small Fusion Reactor Concept Part IDocument4 pagesThe OHTE Small Fusion Reactor Concept Part Imsa83No ratings yet
- Roboadvisor Performance PredictionDocument2 pagesRoboadvisor Performance Predictionmsa83No ratings yet
- Developing A Business Model and IT Foundation For Digital Healthcare v4Document10 pagesDeveloping A Business Model and IT Foundation For Digital Healthcare v4msa83No ratings yet
- ERP Deployment Lessons LearnedDocument4 pagesERP Deployment Lessons Learnedmsa83No ratings yet
- The OHTE Small Fusion Reactor Concept Part IIIDocument16 pagesThe OHTE Small Fusion Reactor Concept Part IIImsa83No ratings yet
- The OHTE Small Fusion Reactor Concept Part IIDocument18 pagesThe OHTE Small Fusion Reactor Concept Part IImsa83No ratings yet
- Linking Agile, Cloud Computing, and DevOpsDocument6 pagesLinking Agile, Cloud Computing, and DevOpsmsa83No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)