You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- SnowflakeDocument43 pagesSnowflakeRick VNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fanuc Terminal Type I/O Module Connecting ManualDocument40 pagesFanuc Terminal Type I/O Module Connecting ManualCristobal PerezNo ratings yet
- Validating Software Systems To Comply With CGMP and 21 CFR Part 11 RegulationsDocument10 pagesValidating Software Systems To Comply With CGMP and 21 CFR Part 11 RegulationsmastercontroldotcomNo ratings yet
- Voice-Customizable Text-To-Speech For Intelligent Home Care SystemDocument3 pagesVoice-Customizable Text-To-Speech For Intelligent Home Care SystemyyogeshnakateNo ratings yet
- Source:: Traffic Analysis OverviewDocument11 pagesSource:: Traffic Analysis OverviewIhsan ul HaqNo ratings yet
- Baliwag Polytechnic College: Dalubhasaan Kong MahalDocument10 pagesBaliwag Polytechnic College: Dalubhasaan Kong MahalDudz MatienzoNo ratings yet
- Taller Practica ChurnDocument6 pagesTaller Practica ChurnLuis Medina50% (2)
- Greedy AlgorithmsDocument16 pagesGreedy AlgorithmsAnukul GangwarNo ratings yet
- DSP MCQ's PDFDocument13 pagesDSP MCQ's PDFMUSHTAREEN HARLAPURNo ratings yet
- Kedarnath Aggarwal Institute of ManagementDocument32 pagesKedarnath Aggarwal Institute of ManagementJatin DuaNo ratings yet
- Stt315 Quiz 7 SolutionsDocument4 pagesStt315 Quiz 7 SolutionsYasir Al-kathiriNo ratings yet
- Lecture 3-CSSDocument94 pagesLecture 3-CSSShruti Garg IITNo ratings yet
- Final PaperDocument139 pagesFinal PaperJerichoNo ratings yet
- Aparna CVDocument4 pagesAparna CVTest UserNo ratings yet
- Your E-Admit CardDocument7 pagesYour E-Admit CardH SeriesNo ratings yet
- A Novel Deep Learning Framework Approach For Sugarcane Disease DetectionDocument20 pagesA Novel Deep Learning Framework Approach For Sugarcane Disease DetectionSakshi SrivastavaNo ratings yet
- Connect HANA To SLD and Solution Manager - SCN PDFDocument7 pagesConnect HANA To SLD and Solution Manager - SCN PDFbasis445No ratings yet
- Film EditingDocument43 pagesFilm EditingIndira SudharsanNo ratings yet
- Ibrahim BadhushaDocument37 pagesIbrahim Badhushacomputer kilyNo ratings yet
- 2024pascal (E) OnlineDocument6 pages2024pascal (E) Online7760 RishiNo ratings yet
- OptiX OSN 500 Configuration ManualDocument64 pagesOptiX OSN 500 Configuration ManualThunder-Link.com80% (10)
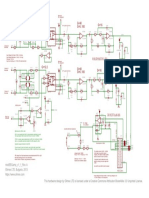
- modEEGamp v1.1Document1 pagemodEEGamp v1.1TepeRudeboy100% (2)
- 0 ClassNotesDocument144 pages0 ClassNotespaladugu dileep kumar0% (1)
- Errata For Algorithms, 4th Edition, Eleventh Printing (October 2017)Document4 pagesErrata For Algorithms, 4th Edition, Eleventh Printing (October 2017)voniriverNo ratings yet
- Transmission Line Length, Operating Condition and Rating RegimeDocument6 pagesTransmission Line Length, Operating Condition and Rating RegimeDaniel SanchezNo ratings yet
- Best Notes You Can ExpectDocument4 pagesBest Notes You Can ExpectSagarNo ratings yet
- Shadowbane PC Game ManualDocument89 pagesShadowbane PC Game ManualWyldHunterNo ratings yet
- Diniyah: Jurnal Pendidikan DasarDocument7 pagesDiniyah: Jurnal Pendidikan Dasarnabil nafiNo ratings yet
- Using Binary Integer Programming To Deal With Yes-or-No DecisionDocument5 pagesUsing Binary Integer Programming To Deal With Yes-or-No DecisionRogelyn May AgustinNo ratings yet
- A Presentation On M CommerceDocument12 pagesA Presentation On M CommercemailsoumyabNo ratings yet