You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- MTH4100 Calculus I: Lecture Notes For Week 5 Thomas' Calculus, Sections 2.6 To 3.5 Except 3.3Document10 pagesMTH4100 Calculus I: Lecture Notes For Week 5 Thomas' Calculus, Sections 2.6 To 3.5 Except 3.3Roy VeseyNo ratings yet
- Functional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)From EverandFunctional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)No ratings yet
- Instantaneous Rate of Change - The DerivativeDocument7 pagesInstantaneous Rate of Change - The DerivativeTrishul GyNo ratings yet
- 2.3 Basic Differentiation FormulasDocument3 pages2.3 Basic Differentiation FormulastinasheembofanaNo ratings yet
- Lecture 5Document2 pagesLecture 5anchal shuklaNo ratings yet
- Continuity: X A X ADocument16 pagesContinuity: X A X Aluis calderonNo ratings yet
- F F (X + H) F (X) H .: Notes For The Derivative As A Limit'Document2 pagesF F (X + H) F (X) H .: Notes For The Derivative As A Limit'Plămădeală MaxNo ratings yet
- Derivatives and Differentiation Rules for FunctionsDocument12 pagesDerivatives and Differentiation Rules for FunctionssempiNo ratings yet
- Mathematics I en Chapter 3Document12 pagesMathematics I en Chapter 3PEDRONo ratings yet
- 2.1 The Derivative of A FunctionDocument3 pages2.1 The Derivative of A Functiontinashembofana84No ratings yet
- Calculus NotesDocument7 pagesCalculus Notesjistoni tanNo ratings yet
- MTH4100 Calculus I: Lecture Notes For Week 9 Thomas' Calculus, Sections 4.6 To 5.2 Except 4.7Document11 pagesMTH4100 Calculus I: Lecture Notes For Week 9 Thomas' Calculus, Sections 4.6 To 5.2 Except 4.7Roy VeseyNo ratings yet
- Exp Log TrigDocument8 pagesExp Log Trigqc8w0tnwrtNo ratings yet
- Calculus 1 - Lecture 1Document32 pagesCalculus 1 - Lecture 1Trần Nhật DươngNo ratings yet
- MATH 115: Lecture VII NotesDocument3 pagesMATH 115: Lecture VII NotesDylan C. BeckNo ratings yet
- Differential Calculus Chapter on Functions and DerivativesDocument11 pagesDifferential Calculus Chapter on Functions and DerivativesJorge SotoNo ratings yet
- Limit Function BehaviorDocument10 pagesLimit Function Behavior01. ZUENo ratings yet
- FIG. 1. (A) Slope of A Secant, (B) As X Approaches A, (C) Slope of A Tangent. Credit: Strang, G. & Herman, E. "Jed," 2021. Defining The DerivativeDocument3 pagesFIG. 1. (A) Slope of A Secant, (B) As X Approaches A, (C) Slope of A Tangent. Credit: Strang, G. & Herman, E. "Jed," 2021. Defining The DerivativeLalbiakhluni ChhangteNo ratings yet
- MTH101: Calculus I Lecture 5: Derivatives: International Burch UniversityDocument15 pagesMTH101: Calculus I Lecture 5: Derivatives: International Burch Universitylu cucuNo ratings yet
- Calculus I Summary: Tabulated by Lambert Peng at Brown in Summer 2008Document3 pagesCalculus I Summary: Tabulated by Lambert Peng at Brown in Summer 2008Thuy TienNo ratings yet
- Calculus To First ExamDocument9 pagesCalculus To First ExamSteven WalkerNo ratings yet
- Problems On Limit of A FunctionDocument2 pagesProblems On Limit of A FunctionSwapnaneel BhattacharyyaNo ratings yet
- Key concepts and theorems of functions and limitsDocument33 pagesKey concepts and theorems of functions and limitsOutis WongNo ratings yet
- Hw10 SolutionsDocument5 pagesHw10 SolutionsJack RockNo ratings yet
- Calculus I: Unit 3: DerivativesDocument45 pagesCalculus I: Unit 3: DerivativesTÂN NGUYỄN DUYNo ratings yet
- Cal1 Econ Week2Document15 pagesCal1 Econ Week2Jaselle NamuagNo ratings yet
- Finding - DerivativeDocument7 pagesFinding - DerivativeHarry PotterNo ratings yet
- Ross SolutionsDocument12 pagesRoss Solutionssoumya mirdhaNo ratings yet
- Maxima, Minima, Rolle's Theorem & DerivativesDocument2 pagesMaxima, Minima, Rolle's Theorem & DerivativesvishaldeepNo ratings yet
- Continuous Functions and LimitsDocument9 pagesContinuous Functions and LimitsQurban HanifNo ratings yet
- Calculus Overview: 0.1 Limits and ContinuityDocument14 pagesCalculus Overview: 0.1 Limits and Continuitytanmoy bhattacharjeeNo ratings yet
- Chain RuleDocument2 pagesChain RuleGaurav ChaudhariNo ratings yet
- Real Analysis Final Solutions ExplainedDocument10 pagesReal Analysis Final Solutions ExplainedBikash chutiaNo ratings yet
- c1 4 InfinitesimalDocument7 pagesc1 4 Infinitesimal01. ZUENo ratings yet
- Math CalculusDocument60 pagesMath Calculuserffan yusofNo ratings yet
- Lim (2f (X) + H (X) ) Lim G (X) Since Lim G (X) 6 0 2 Lim F (X) + Lim H (X) Lim G (X) 2 (2) + 0 5 4 5Document9 pagesLim (2f (X) + H (X) ) Lim G (X) Since Lim G (X) 6 0 2 Lim F (X) + Lim H (X) Lim G (X) 2 (2) + 0 5 4 5Athena DiestaNo ratings yet
- Lecture 4 Limit LawsDocument9 pagesLecture 4 Limit LawsgontseNo ratings yet
- Representation of Functions by Taylor SeriesDocument4 pagesRepresentation of Functions by Taylor SeriesAsif IqbalNo ratings yet
- HIGHER DERIVATIVESDocument6 pagesHIGHER DERIVATIVESHarry PotterNo ratings yet
- ConcavityDocument3 pagesConcavityparapara11No ratings yet
- Derivatives: F X) Lim F (H+X) F (X) HDocument6 pagesDerivatives: F X) Lim F (H+X) F (X) HJaycher BagnolNo ratings yet
- (Chap 2) DerivativesDocument46 pages(Chap 2) DerivativesTruong Cong Trinh (K17 DN)No ratings yet
- Derivatives and Its ApplicationDocument32 pagesDerivatives and Its ApplicationFitawrary Alene TeferaNo ratings yet
- Derivatives HandoutDocument9 pagesDerivatives HandoutTruKNo ratings yet
- Lec.9 DifferentiationDocument13 pagesLec.9 DifferentiationNajiba HamadNo ratings yet
- Summary of Curve SketchingDocument7 pagesSummary of Curve SketchingOsman JallohNo ratings yet
- 1371-EMVTDocument6 pages1371-EMVTAhmed SudanNo ratings yet
- L'Hopital's RuleDocument3 pagesL'Hopital's Rulesuluclac100% (1)
- Notes DifferentiabilityDocument84 pagesNotes DifferentiabilitySrvNo ratings yet
- MTH4100 Calculus I: Lecture Notes For Week 4 Thomas' Calculus, Sections 2.4 To 2.6Document15 pagesMTH4100 Calculus I: Lecture Notes For Week 4 Thomas' Calculus, Sections 2.4 To 2.6Roy VeseyNo ratings yet
- 2006 VIGRE REU Paper: 1 The Fundamental Theorem of Algebra - Proof 1 (Topological)Document4 pages2006 VIGRE REU Paper: 1 The Fundamental Theorem of Algebra - Proof 1 (Topological)Epic WinNo ratings yet
- Midterm MAT1025 Calculus I 2010gDocument10 pagesMidterm MAT1025 Calculus I 2010gZuhalNo ratings yet
- Lectures#5 9Document22 pagesLectures#5 9Jargalmaa ErdenemandakhNo ratings yet
- Summary of Chapter 2 "Integration" Mathematics 1 EnglishDocument5 pagesSummary of Chapter 2 "Integration" Mathematics 1 EnglishBoutaina TouffahiNo ratings yet
- Final14 15M102EDocument1 pageFinal14 15M102EMohamad TouskaNo ratings yet
- NCERT Continuity & DifferentiationDocument31 pagesNCERT Continuity & Differentiationmastermohit1No ratings yet
- Chapter 2, Lecture 3: Building Convex FunctionsDocument4 pagesChapter 2, Lecture 3: Building Convex FunctionsCơ Đinh VănNo ratings yet
- Understanding DerivativesDocument2 pagesUnderstanding DerivativesPatrick BragaNo ratings yet
- Continuous Functions Pass Through All ValuesDocument11 pagesContinuous Functions Pass Through All ValuesRiley CollinsNo ratings yet
- LOG1Document1 pageLOG1Plămădeală MaxNo ratings yet
- Creativity Is Intelligence Havin' Fun.: Albert EinsteinDocument1 pageCreativity Is Intelligence Havin' Fun.: Albert EinsteinPlămădeală MaxNo ratings yet
- 10 Steps To Earning Awesome GradesDocument88 pages10 Steps To Earning Awesome GradesKamal100% (7)
- A Byte of PythonDocument117 pagesA Byte of Pythonanaf siddiNo ratings yet
- Learn PDFDocument97 pagesLearn PDFnivetha sundarNo ratings yet
- Notes For Limit Laws': F (X) G (X)Document6 pagesNotes For Limit Laws': F (X) G (X)John Rick VasolNo ratings yet
- F F (X + H) F (X) H .: Notes For The Derivative As A Limit'Document2 pagesF F (X + H) F (X) H .: Notes For The Derivative As A Limit'Plămădeală MaxNo ratings yet
- Notes For Limits and Continuity'Document5 pagesNotes For Limits and Continuity'Plămădeală MaxNo ratings yet
- Rezumat ȚiggfaniadaDocument1 pageRezumat ȚiggfaniadaPlămădeală MaxNo ratings yet
- Ame 302 Numerical Methods Sample Exam1 s19 SolnsDocument13 pagesAme 302 Numerical Methods Sample Exam1 s19 SolnsArnaz Asa SholehNo ratings yet
- 1201C B.P.S. XII Physics Chapterwise Advanced Study Material 2015 17 PDFDocument463 pages1201C B.P.S. XII Physics Chapterwise Advanced Study Material 2015 17 PDFRizwan SalimNo ratings yet
- Divide-and-Conquer Technique:: Finding Maximum & MinimumDocument8 pagesDivide-and-Conquer Technique:: Finding Maximum & MinimumFaria Farhad MimNo ratings yet
- PrenovaDocument17 pagesPrenovaErmitañoDelValleNo ratings yet
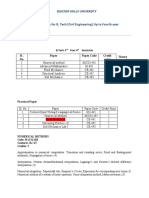
- Seacom Skills University: B.Tech 2 Year 4 Semester Theory Paper Sl. No. Paper Paper Code Credit PointDocument11 pagesSeacom Skills University: B.Tech 2 Year 4 Semester Theory Paper Sl. No. Paper Paper Code Credit PointM RoyNo ratings yet
- Ac DC LoadflowDocument35 pagesAc DC LoadflowSajith RpNo ratings yet
- FAQs in C LanguageDocument256 pagesFAQs in C LanguageShrinivas A B0% (2)
- International supply chain agility tradeoffs between flexibility and uncertaintyDocument17 pagesInternational supply chain agility tradeoffs between flexibility and uncertaintyΕυαγγελία ΠαττακούNo ratings yet
- Ossc CGL 2022Document44 pagesOssc CGL 2022Smita MohantyNo ratings yet
- Civil ProfileDocument173 pagesCivil Profilezilangamba_s4535No ratings yet
- Hull: Options, Futures and Other Derivatives, Tenth Edition Chapter 15: The Black-Scholes-Merton Model Multiple Choice Test BankDocument4 pagesHull: Options, Futures and Other Derivatives, Tenth Edition Chapter 15: The Black-Scholes-Merton Model Multiple Choice Test BankKevin Molly KamrathNo ratings yet
- Summative Test Q2W3&W4Document4 pagesSummative Test Q2W3&W4Querubee Donato Diolula50% (2)
- Algorithms TopicsDocument11 pagesAlgorithms TopicsAnonymous 1Xtj2DjMNo ratings yet
- Relationships: Bamweyana Ivan LSG 2102Document17 pagesRelationships: Bamweyana Ivan LSG 2102Kiruhura TaremwaNo ratings yet
- Unit - 2: Code Tuning TechniquesDocument15 pagesUnit - 2: Code Tuning TechniquesRISHIRAJ CHANDANo ratings yet
- Dehradun Public School SYLLABUS 2022-23 Class-Xii: ENGLISHDocument9 pagesDehradun Public School SYLLABUS 2022-23 Class-Xii: ENGLISHSatyakashi SaxenaNo ratings yet
- Chapter 7 - Automatic Control SystemsDocument46 pagesChapter 7 - Automatic Control SystemsokhtayNo ratings yet
- Intelligent Tutoring Systems - MIT PDFDocument2 pagesIntelligent Tutoring Systems - MIT PDFgesvinNo ratings yet
- SAAB Airborne IRST ModellingDocument9 pagesSAAB Airborne IRST ModellingDhimas AfihandarinNo ratings yet
- Beam Analysis2dDocument80 pagesBeam Analysis2dMSNo ratings yet
- Math Operation Table TarpDocument5 pagesMath Operation Table TarpAna Mirata DumaogNo ratings yet
- Large Number Addition Subtraction Multiplication Division Percentage TricksDocument4 pagesLarge Number Addition Subtraction Multiplication Division Percentage TricksTheus LineusNo ratings yet
- Dr. Muhammad Shahzad Department of Computing (DOC), SEECS, NUSTDocument45 pagesDr. Muhammad Shahzad Department of Computing (DOC), SEECS, NUSTMaham JahangirNo ratings yet
- Pertemuan 3 English ClassroomDocument12 pagesPertemuan 3 English ClassroomAchmadFandiSantosoNo ratings yet
- NCERT Class 11 Computer Science Algorithms and FlowchartsDocument11 pagesNCERT Class 11 Computer Science Algorithms and FlowchartsAditya KumarNo ratings yet
- ME501 L3 Stress-Strain Relations Oct 2017Document8 pagesME501 L3 Stress-Strain Relations Oct 2017Firas RocktNo ratings yet
- Pujol - Garcia Del Barrio - Hydden Monopsony Rents in Winner Take All Markets - MAn DEcEC - 2007Document14 pagesPujol - Garcia Del Barrio - Hydden Monopsony Rents in Winner Take All Markets - MAn DEcEC - 2007Felix Lancha MartinNo ratings yet
- A4 - G10 - Q3 - Module 2 - MELC 3&4Document12 pagesA4 - G10 - Q3 - Module 2 - MELC 3&4Jayzi VicenteNo ratings yet
- Revision WorksheetDocument5 pagesRevision Worksheethashirkk85No ratings yet
- Introduction To Model Predictive Control (MPC) : Oscar Mauricio Agudelo Mañozca Bart de MoorDocument17 pagesIntroduction To Model Predictive Control (MPC) : Oscar Mauricio Agudelo Mañozca Bart de MoorfutNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)