You might also like
- M4Document105 pagesM4Usama SabirNo ratings yet
- CH 4Document14 pagesCH 4sakuNo ratings yet
- Lecture 21 03 02 2023 PDFDocument6 pagesLecture 21 03 02 2023 PDFBinita KumariNo ratings yet
- Standard Single Purpose Processors: PeripheralsDocument17 pagesStandard Single Purpose Processors: Peripheralskank1234No ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument22 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionRoland SalloumNo ratings yet
- Lecture 5 - PeripheralsDocument17 pagesLecture 5 - PeripheralsGelantuNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument17 pagesEmbedded Systems Design: A Unified Hardware/Software Introductiondayat_ridersNo ratings yet
- Lecture 5 - PeripheralsDocument29 pagesLecture 5 - PeripheralsGelantuNo ratings yet
- Lesson: Embedded Systems I/O TimersDocument9 pagesLesson: Embedded Systems I/O TimersPuspala ManojkumarNo ratings yet
- Lecture7 MCU Timers - ADCDocument36 pagesLecture7 MCU Timers - ADCAKSHATA R CNo ratings yet
- Electronics-Communication Engineering Embedded-Systems Timers NotesDocument17 pagesElectronics-Communication Engineering Embedded-Systems Timers NotesSSSSSSSSSSSSNo ratings yet
- Computer Organization: Topics Covered: CPU ArchitectureDocument25 pagesComputer Organization: Topics Covered: CPU ArchitectureRam RamNo ratings yet
- Embeded System2Document23 pagesEmbeded System2Sheikh NuraniNo ratings yet
- CP0070 02-Aug-2011 RM01Document10 pagesCP0070 02-Aug-2011 RM01anandan0No ratings yet
- CD54/74HC4059: High-Speed CMOS Logic CMOS Programmable Divide-by-N CounterDocument7 pagesCD54/74HC4059: High-Speed CMOS Logic CMOS Programmable Divide-by-N CounterDanielNo ratings yet
- cd74 hc4059Document11 pagescd74 hc4059parvalhao_No ratings yet
- Lecture 9 - Ch8 Programming CountersDocument54 pagesLecture 9 - Ch8 Programming CountersAbdul-Aziz MasadNo ratings yet
- Datasheet DSPIC33EP128MC204 70000657H-277982Document531 pagesDatasheet DSPIC33EP128MC204 70000657H-277982EduardoNo ratings yet
- Dspic33epxxxgp50x Dspic33epxxxmc20x 50x and Pic24epxxxgp Mc20x Family Data Sheet Ds70000657jDocument546 pagesDspic33epxxxgp50x Dspic33epxxxmc20x 50x and Pic24epxxxgp Mc20x Family Data Sheet Ds70000657jJose DanielNo ratings yet
- STM32 Timers TutorialDocument6 pagesSTM32 Timers TutorialHossein MajidiNo ratings yet
- Dsa 472314Document4 pagesDsa 472314Sitota tesfayeNo ratings yet
- Product Overview: Ks88-Series MicrocontrollersDocument32 pagesProduct Overview: Ks88-Series MicrocontrollersCesar JakobyNo ratings yet
- MPS - Ch09 - AVR - Timer Programming in Assembly and CDocument124 pagesMPS - Ch09 - AVR - Timer Programming in Assembly and CPhương Nghi LiênNo ratings yet
- ECE3620Unit 8Document98 pagesECE3620Unit 8ed85201No ratings yet
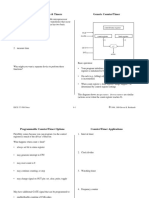
- Programmable Counters & Timers Generic Counter/Timer: Control/status RegisterDocument4 pagesProgrammable Counters & Timers Generic Counter/Timer: Control/status RegisterSNo ratings yet
- What Is Counter?: Flip-FlopDocument8 pagesWhat Is Counter?: Flip-FlopArunNo ratings yet
- CO Workbook - Updated - CounterDocument6 pagesCO Workbook - Updated - CounterDeepak KumbharNo ratings yet
- 5c AVR Timer (16 Bit)Document78 pages5c AVR Timer (16 Bit)Muhammad BilalNo ratings yet
- PBGGDDocument4 pagesPBGGDLuis Rodriguez100% (2)
- 74HC162Document12 pages74HC162MUHAMMAD SISWANTORONo ratings yet
- Dspic33epxxxgm3xx 6xx 7xx DatasheetDocument542 pagesDspic33epxxxgm3xx 6xx 7xx DatasheetarolnNo ratings yet
- 6 RegistersDocument24 pages6 RegistersPiyooshTripathiNo ratings yet
- Unit 3Document62 pagesUnit 3sreekar723No ratings yet
- Lec06 DS 2018-PrintDocument65 pagesLec06 DS 2018-PrintHưng PhạmNo ratings yet
- Design IdeasDocument5 pagesDesign IdeasciberpeladoNo ratings yet
- Embedded Lecture 4 ARMDocument47 pagesEmbedded Lecture 4 ARMmsmukeshsinghmsNo ratings yet
- 74HC HCT193 CNV 2 PDFDocument14 pages74HC HCT193 CNV 2 PDFIrvinRamAltNo ratings yet
- 8-, 16-, 24-And 32-Bit Timers: CY8C29/27/24/22xxx Data SheetDocument40 pages8-, 16-, 24-And 32-Bit Timers: CY8C29/27/24/22xxx Data Sheetthanggimme.phanNo ratings yet
- Avr ArchitectureDocument29 pagesAvr ArchitectureOdoch HerbertNo ratings yet
- Unit IV PPTDocument73 pagesUnit IV PPTR R DeshmukhNo ratings yet
- Timers and InterruptDocument38 pagesTimers and Interrupt21146387No ratings yet
- Infineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENDocument42 pagesInfineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENFatenn BellakhdharNo ratings yet
- TMS320F2812-Analogue To Digital ConverterDocument26 pagesTMS320F2812-Analogue To Digital ConverterPantech ProLabs India Pvt LtdNo ratings yet
- MCU - PIC24FV32KA304 - MICROCHIP - Datasheet PDFDocument352 pagesMCU - PIC24FV32KA304 - MICROCHIP - Datasheet PDFLodewyk KleynhansNo ratings yet
- Coeng3059:: Digital Logic DesignDocument72 pagesCoeng3059:: Digital Logic DesignALEMU DEMIRACHEWNo ratings yet
- 4 CCP ModuleDocument35 pages4 CCP ModuleM.i. RehmanNo ratings yet
- 4-Analog InputDocument21 pages4-Analog InputTam PhamNo ratings yet
- CH 6 TimerDocument4 pagesCH 6 TimerChawki WikiNo ratings yet
- 08 1 PDFDocument7 pages08 1 PDFSivaMarojuNo ratings yet
- Microcontroller Bootcamp (5) : Using TimersDocument10 pagesMicrocontroller Bootcamp (5) : Using TimersMikko FagerlundNo ratings yet
- Adc PWMDocument26 pagesAdc PWMShivaram Reddy ManchireddyNo ratings yet
- Asynchronous CounterDocument5 pagesAsynchronous CounterJose GarciaNo ratings yet
- Parallel Timer InterfaceDocument13 pagesParallel Timer InterfaceRiham AbdallahNo ratings yet
- Counters STDNSDocument18 pagesCounters STDNSmahloko ramatekoaNo ratings yet
- AVR Timer/Counter: Prof Prabhat Ranjan DA-IICT, GandhinagarDocument40 pagesAVR Timer/Counter: Prof Prabhat Ranjan DA-IICT, GandhinagardangkhuyenmaiNo ratings yet
- RTCSelector Guide A4Document20 pagesRTCSelector Guide A4PreciousNo ratings yet
- DAQ Course Counters1Document41 pagesDAQ Course Counters1Orlandox LgNo ratings yet
- The PIC Microcontroller: Your Personal Introductory CourseFrom EverandThe PIC Microcontroller: Your Personal Introductory CourseRating: 1 out of 5 stars1/5 (2)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- The University of The South Pacific: EE326 Embedded SystemsDocument5 pagesThe University of The South Pacific: EE326 Embedded SystemsVijendra PandeyNo ratings yet
- The University of The South Pacific: EE326 Embedded SystemsDocument3 pagesThe University of The South Pacific: EE326 Embedded SystemsVijendra PandeyNo ratings yet
- The University of The South Pacific: EE326 Embedded SystemsDocument2 pagesThe University of The South Pacific: EE326 Embedded SystemsVijendra PandeyNo ratings yet
- The University of The South Pacific: EE326 Embedded SystemsDocument3 pagesThe University of The South Pacific: EE326 Embedded SystemsVijendra PandeyNo ratings yet
- Lect 05 PDFDocument29 pagesLect 05 PDFVijendra PandeyNo ratings yet
- Lect 02 PDFDocument26 pagesLect 02 PDFVijendra PandeyNo ratings yet
- Lect 04 PDFDocument43 pagesLect 04 PDFVijendra PandeyNo ratings yet
- The University of The South Pacific: EE326 Embedded SystemsDocument4 pagesThe University of The South Pacific: EE326 Embedded SystemsVijendra PandeyNo ratings yet
- Lect 09 PDFDocument64 pagesLect 09 PDFVijendra PandeyNo ratings yet
- Lect 03 PDFDocument30 pagesLect 03 PDFVijendra PandeyNo ratings yet
- Lect 01 PDFDocument33 pagesLect 01 PDFVijendra PandeyNo ratings yet
- Lect 06 PDFDocument44 pagesLect 06 PDFVijendra PandeyNo ratings yet
- Product Description ZXA10 C350M v4 0 2Document108 pagesProduct Description ZXA10 C350M v4 0 2Oscar Martinez100% (2)
- Ezcap 269 ManualDocument21 pagesEzcap 269 ManualSYAHRUL ROFIQ ABDILLAH FADLINo ratings yet
- ISA100Document37 pagesISA100Victor Rubilar BobadillaNo ratings yet
- H22N Series 201508Document2 pagesH22N Series 201508TRIINETNo ratings yet
- Industrial Communication: Chapter 2: Modbus SerialDocument33 pagesIndustrial Communication: Chapter 2: Modbus Serialatmoko2No ratings yet
- ADM-12 Annunciator Driver Module 15634 DatashetDocument2 pagesADM-12 Annunciator Driver Module 15634 DatashetSaid RomeroNo ratings yet
- T2FD - The Forgotten Antenna: by Guy AtkinsDocument6 pagesT2FD - The Forgotten Antenna: by Guy AtkinsStroie Claudiu CristianNo ratings yet
- TCEEDocument2 pagesTCEEekta desaiNo ratings yet
- Atria 300Document40 pagesAtria 300Daniel GonzalezNo ratings yet
- JBL Prof. SeriesDocument32 pagesJBL Prof. SeriesMarius GligorNo ratings yet
- Flex I/O 32di 24V DC Sink Module Catalogue NoDocument1 pageFlex I/O 32di 24V DC Sink Module Catalogue NoMùa ThuNo ratings yet
- Quectel EC25 LTE Standard Specification V2.0Document4 pagesQuectel EC25 LTE Standard Specification V2.0tenry_03No ratings yet
- WCP Outdoor Call Point Range: WCP3 NO/NC Contact Model (Red Versions)Document2 pagesWCP Outdoor Call Point Range: WCP3 NO/NC Contact Model (Red Versions)Ovidiu GavrilasNo ratings yet
- TBC UE-9000 ManualDocument367 pagesTBC UE-9000 ManualEmil Abbasov100% (3)
- R00 Ind231-Ind236 TM enDocument159 pagesR00 Ind231-Ind236 TM enpablosandoNo ratings yet
- Nem Prospectus and Fees Structure (1) .Document21 pagesNem Prospectus and Fees Structure (1) .ravikant18180No ratings yet
- Uwb CWD EssayDocument14 pagesUwb CWD EssayEugenio PasquaNo ratings yet
- Automatic Pet Feeder: Manoj MDocument3 pagesAutomatic Pet Feeder: Manoj MRiron CassandraNo ratings yet
- Product Data Sheet 5SY4510-7: Circuit Breaker 230V 10ka, 1+N-Pole, C, 10A, D 70MMDocument4 pagesProduct Data Sheet 5SY4510-7: Circuit Breaker 230V 10ka, 1+N-Pole, C, 10A, D 70MMZallesNo ratings yet
- Protection Arrangements and SettingsDocument3 pagesProtection Arrangements and SettingsJoeDabidNo ratings yet
- Alarm HandlingDocument18 pagesAlarm HandlingPetyo GeorgievNo ratings yet
- BF245 NewJerseySemiconductorDocument1 pageBF245 NewJerseySemiconductorconta temporariaNo ratings yet
- Guild Line 9334 A Data SheetDocument3 pagesGuild Line 9334 A Data SheetLEDNo ratings yet
- What Is A PLCDocument8 pagesWhat Is A PLChafizarslanmushtaq0No ratings yet
- T359 T403 T409 T409SAR T609 T659 T909 C509 MODELS With Bulkhead Connections From Aug 2010 K108Ex & K200 Models From March 2012Document2 pagesT359 T403 T409 T409SAR T609 T659 T909 C509 MODELS With Bulkhead Connections From Aug 2010 K108Ex & K200 Models From March 2012Андрей100% (1)
- Effect of Dielectric Permittivity and Height On A Microstrip-Fed Rectangular Patch AntennaDocument2 pagesEffect of Dielectric Permittivity and Height On A Microstrip-Fed Rectangular Patch AntennarajbabuNo ratings yet
- Ect201 Solid State Devices L-T-P: 3-1-0 SyllabusDocument1 pageEct201 Solid State Devices L-T-P: 3-1-0 SyllabusDr. Rakesh SNo ratings yet
- WiFi Supporting MaterialDocument89 pagesWiFi Supporting MaterialP. SteenNo ratings yet
- Marantz SR7000 8000 Av SMDocument59 pagesMarantz SR7000 8000 Av SMCasteloencantadoNo ratings yet
- Partial Discharge Diagnostic Testing and Monitoring Solutions For High Voltage CablesDocument55 pagesPartial Discharge Diagnostic Testing and Monitoring Solutions For High Voltage CablesElsan BalucanNo ratings yet