You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Engine Instruction Manual: G26 Air G26/G231 Marine G26/G231 Heli G38 G62 GT80 Twin G45Document24 pagesEngine Instruction Manual: G26 Air G26/G231 Marine G26/G231 Heli G38 G62 GT80 Twin G45Brendan ChongNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Vcs DomesticusDocument780 pagesVcs DomesticusStanley Ochieng' OumaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- ONVIF Core Specification v1606Document150 pagesONVIF Core Specification v1606Stanley Ochieng' OumaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
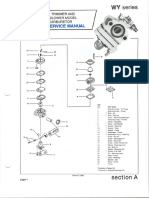
- Wy SeriesDocument6 pagesWy SeriesStanley Ochieng' OumaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Zen UAV Mission Simulator BrochureDocument2 pagesZen UAV Mission Simulator BrochurevenkyymdNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- ONVIF Core Specification v1606Document150 pagesONVIF Core Specification v1606Stanley Ochieng' OumaNo ratings yet
- Up 3ghatDocument1 pageUp 3ghatStanley Ochieng' OumaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- X-Plane Ac3d Plugin Manual Ver 1 2Document21 pagesX-Plane Ac3d Plugin Manual Ver 1 2Stanley Ochieng' OumaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Rugged & Ready: ADLINK Solutions For Data-Driven Defense and Aerospace ApplicationsDocument10 pagesRugged & Ready: ADLINK Solutions For Data-Driven Defense and Aerospace ApplicationsStanley Ochieng' OumaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- LTS 2016 Q1Q2 CatalogDocument35 pagesLTS 2016 Q1Q2 CatalogStanley Ochieng' OumaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Compact 1.8" Height Standardized Installation 9 Months To Flight Powerful and LightweightDocument2 pagesCompact 1.8" Height Standardized Installation 9 Months To Flight Powerful and LightweightStanley Ochieng' OumaNo ratings yet
- Wiatag 1.3: User GuideDocument26 pagesWiatag 1.3: User GuideStanley Ochieng' OumaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Laser Altimeter: Product ManualDocument16 pagesLaser Altimeter: Product ManualStanley Ochieng' OumaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Wiatag 1.3: User GuideDocument26 pagesWiatag 1.3: User GuideStanley Ochieng' OumaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Narrow Band Radio Transceiver 434 MHZ: PreliminaryDocument1 pageNarrow Band Radio Transceiver 434 MHZ: PreliminaryStanley Ochieng' OumaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Temp-1Wire-Outdoor 3m: Environment: Indoor or Outdoor Use Input Temperature Range: - 5 Interface: 1wire RJ11, 3 M CableDocument1 pageTemp-1Wire-Outdoor 3m: Environment: Indoor or Outdoor Use Input Temperature Range: - 5 Interface: 1wire RJ11, 3 M CableStanley Ochieng' OumaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- TM-901 Miniature Video TransmitterDocument2 pagesTM-901 Miniature Video TransmitterStanley Ochieng' OumaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- VSP Aircraft Analysis User ManualDocument58 pagesVSP Aircraft Analysis User ManualStanley Ochieng' OumaNo ratings yet
- RF Video Distribution SystemDocument23 pagesRF Video Distribution SystemStanley Ochieng' OumaNo ratings yet
- Intro To Network Analysis 2nd Ed. - L. Chappell (Podbooks, 2001) WW PDFDocument205 pagesIntro To Network Analysis 2nd Ed. - L. Chappell (Podbooks, 2001) WW PDFStanley Ochieng' OumaNo ratings yet
- Mason - Applied Computational Aerodynamics PDFDocument450 pagesMason - Applied Computational Aerodynamics PDFDiana DumitrascuNo ratings yet
- Automotive Electrical Handbook PDFDocument132 pagesAutomotive Electrical Handbook PDFStanley Ochieng' Ouma0% (1)
- Weierman Okstate 0664M 10946 PDFDocument107 pagesWeierman Okstate 0664M 10946 PDFAEROWORKERNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Bible King James Version PDFDocument2,652 pagesBible King James Version PDFStanley Ochieng' OumaNo ratings yet
- Zama 2011 Service ManualDocument170 pagesZama 2011 Service ManualHans Hansen100% (1)
- HowToAccelerate YourInternetDocument313 pagesHowToAccelerate YourInternetAnurag PandeNo ratings yet
- (BOSCH2002) BOSCH Automotive HandbookDocument1,391 pages(BOSCH2002) BOSCH Automotive HandbookBalaji RamanNo ratings yet
- PING-2020 ADS-B Transceiver: VerviewDocument2 pagesPING-2020 ADS-B Transceiver: VerviewshombisNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- MaxonECmotor NotesDocument24 pagesMaxonECmotor NotesErhan GencNo ratings yet
- GSSI SIR 20 ManualDocument100 pagesGSSI SIR 20 ManualLuis Pacheco GonzálezNo ratings yet
- D73668GC21 AppdDocument10 pagesD73668GC21 Appdpraveen2kumar5733No ratings yet
- TAW11 - 2 - ABAP Types and Data ObjectsDocument47 pagesTAW11 - 2 - ABAP Types and Data ObjectsJosé VicenteNo ratings yet
- Unit - 4 XMLDocument82 pagesUnit - 4 XMLsrinivas890No ratings yet
- Flushing + Livorno paper pallet deliveriesDocument26 pagesFlushing + Livorno paper pallet deliveriesArief Rakhman HidayatNo ratings yet
- PYTHON FUNCTIONS GUIDEDocument18 pagesPYTHON FUNCTIONS GUIDEVeeranan SenniahNo ratings yet
- Struts 2Document69 pagesStruts 2arvindkumar1086No ratings yet
- 71noptnms Am ADocument280 pages71noptnms Am Aarismendyt06No ratings yet
- 5.3. Guideline For Navisworks Manage (4D Simulation)Document32 pages5.3. Guideline For Navisworks Manage (4D Simulation)hanNo ratings yet
- 7th Grade 20 Day Homework Day 8Document8 pages7th Grade 20 Day Homework Day 8g3v3q3ng100% (1)
- Ebikemotion Tech APP Framework PDFDocument72 pagesEbikemotion Tech APP Framework PDFJose GarciaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TafjDocument4 pagesTafjgnana_sam100% (2)
- MDAT Step-by-Step GuideDocument47 pagesMDAT Step-by-Step GuideRonabelle T. OliverosNo ratings yet
- Sms 2700 Intro XXXX Ud10Document124 pagesSms 2700 Intro XXXX Ud10dilush ranathunge RanathungeNo ratings yet
- Ent-Factsheet Network Security 7100 Series 01-2005.en-UsDocument7 pagesEnt-Factsheet Network Security 7100 Series 01-2005.en-UsLawrence O OgunsusiNo ratings yet
- EGCB, PGCB, DPDC Full Question Pattern Free PDF by BUETDocument6 pagesEGCB, PGCB, DPDC Full Question Pattern Free PDF by BUETexplorer.asifNo ratings yet
- OKIOK Focal Point Evaluators GuideDocument15 pagesOKIOK Focal Point Evaluators GuideAtticus DBNo ratings yet
- Data Mining With Weka: Ian H. WittenDocument33 pagesData Mining With Weka: Ian H. WittenQuân PhạmNo ratings yet
- Year 10 Ict CourseworkDocument6 pagesYear 10 Ict Courseworkbcr9srp4100% (2)
- TSR-IEEE TemplateDocument11 pagesTSR-IEEE TemplateAfrina ZainudiNo ratings yet
- Mechatronic System Design Project: A 3D Printer Case Study: November 2015Document7 pagesMechatronic System Design Project: A 3D Printer Case Study: November 2015maitham100No ratings yet
- Question # 1: (Answer The Question On The Excel Answer Sheet) (40 Marks)Document1 pageQuestion # 1: (Answer The Question On The Excel Answer Sheet) (40 Marks)علي عليNo ratings yet
- LTC2410 Datasheet and Product Info - Analog DevicesDocument6 pagesLTC2410 Datasheet and Product Info - Analog DevicesdonatoNo ratings yet
- STM32Journal DSPC PDFDocument9 pagesSTM32Journal DSPC PDFNguyen Ho LongNo ratings yet
- SEGA Mega Drive - Assembly WorkshopDocument87 pagesSEGA Mega Drive - Assembly WorkshopdotemacsNo ratings yet
- PLC and HMI Development With Siemens TIA Portal Develop PLC and HMI Programs - Bibis - Ir 1 200 PDFDocument200 pagesPLC and HMI Development With Siemens TIA Portal Develop PLC and HMI Programs - Bibis - Ir 1 200 PDFBruno Jonko Duarte100% (1)
- Using Python and Sockets: System Power Supply ProgrammingDocument6 pagesUsing Python and Sockets: System Power Supply ProgramminghigocNo ratings yet
- Chapter 3 - Data Security &integrityDocument18 pagesChapter 3 - Data Security &integrityGetnete degemuNo ratings yet
- The Whale Rider - Witi Ihimaera - PDF - Whales - SeaDocument135 pagesThe Whale Rider - Witi Ihimaera - PDF - Whales - SeaPriya Mohinani0% (1)
- MongoDB Multi-Document ACID Transactions ExplainedDocument45 pagesMongoDB Multi-Document ACID Transactions Explainedjesus romel mendoza huillcaNo ratings yet
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)