Professional Documents
Culture Documents
Devoir de Synthèse N°1 2017 2018 (MR Ben Abdallah Marouan)
Devoir de Synthèse N°1 2017 2018 (MR Ben Abdallah Marouan)
Uploaded by
Piere Ebrahim0 ratings0% found this document useful (0 votes)
74 views12 pagesOriginal Title
devoir-de-synthèse-n°1--2017-2018(mr-ben-abdallah-marouan)
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
74 views12 pagesDevoir de Synthèse N°1 2017 2018 (MR Ben Abdallah Marouan)
Devoir de Synthèse N°1 2017 2018 (MR Ben Abdallah Marouan)
Uploaded by
Piere EbrahimCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 12
Devoir DE SYNTHESE N°1
Proposé par les enseignants :
M" BEN ABDALLAH MAROUAN
Pour la date de : Mardi 23 - Janvier - 2018
SYSTEME D’ ETUDE
UNITE DE PRODUCTION De Pots DE MIEL
Classe : 4° SeT
Année Scolaire : 2017-2018
Devoir.tn
toutes les matiéres, tous les niveaux
DossttR TECHNIQUE
1- PRESENTATION DU SYSTEME :
La- DESCRIPTIO’
L'unité de production de pots de miel se compose de quatre modules distinets
‘© Module de fabrication des pots par thermoformage :
Module de remplissage des pots en miel
Module de fermeture des pots par soudage et découpage par groupe de 4 pots ;
Module dlempaquetage par paquet de 12 groupes
Le pot est le contenant dans
lequel est injecté le mie
© Bandes de plastique.
© Bandes de 4 pots vides
© Bandes de 4 pots pleins.
© Groupes de 4 pots soudés.
© Paquets contenant 12 groupes de 4 pots chacun.
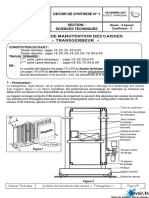
Liétude va porter sur le poste de remplissage des pots, quatre pots sont remplis en méme temps,
Ce poste se compose de trois parties:
+ Un module de production d'eau chaude pour faite fondre le miel;
+ Un module du dosage et d'injection du miet dans les pots actionné par le vérin Cx;
* Une carte a microcontréleur permettant la gestion de l'ensemble.
L.b- FONCTIONNEMENT DU POSTE DE REMPLISSAGE :
Cuve de miel
Vérin C,
Vérin Cy
[J+ Moteur réducteur frein Mt Tapis roulant Tp
Le miel injecté est d'abord amené a une température de 74°C pour le liquéfier grace 4 un circuit d'eau chaude
circulant autour de la cuve de miel (Cette température doit ére maintenue constante afin de faire fondre le miel sans
déformer les pots)
Devoir de Symhése N°I (2017-2018) Page 1/6 Unité De Peopuction Dr Pots DE)
Labo de Technologie de KORBA. ‘htp://mimfsjimdo,com! Propose par M' Diervoies har
toutes les matiéres, tous les niveaux
DossieR TECHNIQUE
[arrivée des pots du poste de fabrication auprés dtm eaptenr S, et la condition initiale démarrent le eycle snivant
‘© Amener les pots sous les pistons seringues par le tapis roulant Tp; entrainé par un moteur réducteur frein Mt,
avec une vitesse lente jsqu’a Paction sur le capteur Sp
o Descendre l'ensemble (cuve + buses + vérin C2) par le vérin C; ;
co Remplir au miel les quatre pots par la rentrée puis la sortie du vérin C2 ;
co Remonter ensemble (cuve + buses + vérin C3) en position haute par la rentrée du vérin Cy :
co Amener les pots remplis par le tapis Tp; avec une vitesse rapide jusqu’au poste de soudage et de contrile détectés
par un capteur S5.
Le eycle de remplissage se répéte a chaque fois qu'un groupe de quatre pots vides se présente auprés du capteur Sy
Remarque:
“ Lors de la mise au point du poste, un probléme est apart : le mie! étant visqueux, un fil de miel restait la fin du
remplissage entre les buses et le haut des pots. Pour résoudre ce probléme, un temporisateur T(15s) a été rajouté.
La régulation de la température du miel n’apparait pas dans le GRAFCET.
2- CHOIX TECHNOLOGIQUES :
Tableau d’identification des Entrées/Sorties :
‘AcTION —[_ACTIONNEURS PREACTIONNEURS (CAPTEURS
Mty: Moteur x
we KM1 [Contacteur vitesse rapide |S: présence pots,
e KM2: [Contacteur vitesse lente | Ss: pots au poste de soudage
permanent,
Denlacer Te, vsin 14M fy zcuve en bas
ee bu m pneumatique | Distributeur 5/2
cuve * buses double effet 1ML L yg: cuve en haut
vérin Cy
Doser et [Cx Verin 14M2 ‘oy: fin injection du miel
Injecter le | pneumatique | Distributeur 5/2 ——
miel double effet 12M2 4p : fin d’aspiration du miel
Temporisateur T t
3- CONTROLE DE LA TEMPERATURE DE_LA LIQUEFACTION DU MIEL
fin de pouvoir remplir les pots en miel, ce demier doit étre liquefié. Pour cela Veau chaude circulant autour de la
cuve de miel doit étre amenée & une température de 74°C #1 °C.
Le schéma structurel de Ia carte qui gére la régulation en température du circuit deau chaude est le suivant
ssY
sav
V-12,8V
je —_Aément
chauffane
&
Vr
v| Dar RO= 1000
®% a= 04 (coefficient)
1Ka = 0 : Température
RT= RO(I+a.06) Fioure2
Le capteur de température utilisé est une sonde P1100, la résistance RT de ce capteur varie en fonction de la
température selon la relation suivante RT= RO (I +a.)
Devoir de Symhése N°I (2017-2018) Page2/6 Unit De PRopuc tion Dr Bors DE
Labo de Technologie de KORBA. ‘tp://mimfsjimdo,com! __Proposé par M* Demeaien tri
toutes les matiéres, tous les niveaux
Dossier TEct
4- COMPTAGE DES POTS :
Le comptage des groupes de quatre pots est réalisé & l'aide d’un capteur optique associé 4 un compteur
la synoptique suivante
Capteur Circuit de mise
optique en forme Compteur modulo 12
Q0 QI Q2 3
On utilise un compteur 4 base de circuit intégré 74161 dont le document constructeur est le suivant
‘CLEAR
‘ouTeuT ia 1s 07 2
it Comoe |, Beat
Datasheet du constructeur du compteur programmable 4029
5- UNITE DE TRAITEMENT NUMERIQUE, == ~~~-~-~~-
| Unité logique
Figure 3 (Ly
UntTé Dé Propuction DE Pots DE
Propose par M' Benen ht
toutes les matiéres, tous les niveaux
Devoir de Synthése N°I (2017-2018)
Labo de Technologie de KORBA
DossieR TECHNIQUE
- Document constructeur du 7485 :
Entrées des nombres Entrées de mise Sorties
en cascade
Ao, 0p | A>D | aco | AqD | a> | aco | a-
x
x) | >) >
c= Bo
Ac= Bo
A= Be
As=Bs | A= Be
As=Bs | Ao= Be |Ac= Bo
ASB: [As= Bs [Ac= Be
As=Bs | Az= Bz |A:=B: | Ac= Bo
2
| 4] >] of of =} ><] >} ><] ><] ><] >] of ><
| =] ><] of 3] of ><] ><] ><] ><] ><] oc] of ><
of of =] =} of of >| >} x] ><] >] >] of ><
6- DISPOSITIF D’ENTRAINEMENT DU TAPIS ROULANT :
Voir figure 4 et figure 5 ci-dessous et dessin d'ensemble pages 5/6 et 6/6 du dossier technique
5.a- MOTORISATION:
motoréducteur frein (Mt)) transmet son mouvement de rotation tambour de tapis
roulant TP, par:
~ Un systéme pignons et chaine & rouleaux double (4-47-56);
- Un engrenage cylindrique & denture droite (8-12)
5.b- EREINAGE: Le motoréducteur est équipé d'un frein a disque a manque de courant qui fonctionne comme suit:
Ala n du motoréducteur frein,
comprime le ressort 32 et libere le disque
A la mise hors tension, I'électro-aimant 31 n'est plus aliments, il libére le plateau mobile 33 qui, sous la
pression du ressort 32. presse le disque sur le plateau fixe 23 pour arréter le tapis roulant.
sous te lectro-aimant 31 attire le plateau mobil
le frein est alors hors service.
Bai
Devoir de Symhése N°I (2017-2018) Page 4/6 Uniti Dé PRopucttoN Dr Bors DE
Labo de Technologie de KORBA. ‘htp://mimsjimdo,com! __Proposé par M* Demeaien tri
toutes les matiéres, tous les niveaux
DossieR TECHNIQUE
7- COMPOS:
Circlips Extérieurs (Pour arbres)
Qs
‘Clavettes paralléles
ales Dimensions Norm:
a afots
Circlips extérieurs Tebitimins [2] 2 oe
Principales Dimensions Normalisées #10 3
a Tae] |S a
[fo [esl ok a a
m9 fae fi3 [12 17a22 els
as [asf a2 [is | 12 2a sts
30 [82 [402 [16 [12 Ae woe
3s [33 [4o2 [16 [1s iw rr
a0 [372 [322 [ass [175 ia iat
48 [2.2 [991 [ass [15 ae a
50 642 2 SBA6S is
ss | 52 [702 2 wars | 0 | 2
8- NOMENCLATURE Z5A8S 2
19 [1 [ Arbre du tambour 381 J Caner
18 [1 | Goupille lastique 371 | Ventiateur 56 [1 | Chaine
1T [1 J Goupitle élastique 36 [1 | Clavette poralale Forme A [$5 [1 [Joint plat
16 [1 | Manchon 35[1 | Disque fein S4[ 3 | Vis 3 téte evindrique Cle
15 [1 | Arbre de sorte 34 [2 | Gamiture 53[ 1 | Stator
14 [1 [Joints tévres| 33 | 2 | Plateau mobile 52.1 | Rotor
131 | Clavette parailgle Forme A 32. 1 | Ressort, S1[1 | Anneau Glastigque pour arbre
12 [1 | Rove deneée 31 [1 | Blectronaimane S0| 1 | Asnoas dlastique pour arbre
TTT | Couvercle 301 J Comps ponte dlecto-aimant [49 [1 | Arbre moteur
10 [3 | Roulement BC 29 [1 | Berou hexagonal 48 [1 | Clavette paralléle Forme A
2 28 [1 | Vis spéciale 47 [1 | Pignon double pour chaine
| Pignon arbré 271 Cache 46 [1 | Joint tevres
| Carter 26] 3 | Berou hexagonal 45 [1 | Roulemen BC
1 | Ronlement RC 25 [3 | Rondolle Grower 44 | 2 [Visa tte eylindrique CHe
4 | Visa te cylindrique CHe [243 | Goujon 43 | 2 | Rondelle plate
| Roue doubie pour chaine 231 | Plateau fixe 42[3 | Goujon
T [Comps 22 [6 | Bloc en eaoutehoue 41 [3 | Ferou hexagonal
[Vis 6 tie eylindrigue CHe J Flasque 3_[ Rondelle Grower
1 [ Cache, 1 [Douite 1 J Bloc moteur
Désignation Désignation Désignation
MOTOREDUCTEUR —_[Dessine Far: 0
Echelle 1:2
FREIN Date: 23 Janvier 2018 o
a)
‘Ag OL] |Nom & Prénom: Classe: 4° SeT
Devoir de Symhése N°I (2017-2018) PageS/6 Unit De PRopuc tion Dr Bors DE
Labo de Technologie de KORBA. ‘tp://mimfsjimdo,com! __Proposé par M* Demeaien tri
toutes les matiéres, tous les niveaux
DossieR TECHNIQUE
DESSIN D'ENSEMBLE
eae)
z
%
ee ~_¥e
~~
\
TIA R\ Hz
\\
\\
|
heb
A [f Lie ‘Ss
Devoir de Synthese N°I (2017-2018) Page 6/6 UntTé Dé PRoDucTION Dé Pots DE
Labo de Technologie de KORBA ‘hpi jim com! Proposé par M'
toutes les matiéres, tous les niveaux
LABORATOIRE MECANIQUE DE KORBA
Devoir de Synthése N’l
2017-2018
gue de Génga ,
Me Sysieme Détude :
~. Unité DE PRODUCTION De Pots DE MIEL
Pour la Date de : 23 Janvier 2018
Lat
Dossier REPONSE
T- ANALYSE FONCTIONNELLE:: (4 Points}
II- COTATION FONCTIONNELLE : [2 POINTS]
II-Erupe Cixématiqve pu REDUCTEUR DE VITESSE : [4,5 Points}
TV- Erupe DU FREIN : [4 Points]
‘V- PRODUCTION D'UNE SOLUTION OU D’UNE MODIFICATION : [5,5 Points]
Nom & Prénom: ... . cee ON Classe : 4" Sciences Techniques ...
N. B: Aucune documentation n'est autorisée
Devoir.tn
toutes les matiéres, tous les niveaux
Nom & Prénom iN Classe: 4 ScT.
1- ANALYSE FONCTIONNELLE : [4 Points]
L1- Etude du motoréducteur frein : (voir dossier technique pages 5/6 et 6/6)
En se référant au dessin d'ensemble du motoréducteur frein assurant lentrainement de tambour du tapis Tpt
Compléter le diagramme F.A.S.T relatif& la fonction (.../LSPIs)
FT: Transmettre le mouvement de rotation de l'arbre moteur 49 4 l'arbre du tambour 19.
FT : Transmettre la rotation de larbre moteur 49
alarbre du tambour 19
FT: Transmettre la rotation de l'arbre moteur
49 au pignon arbré 8
FT: Transmettre la rotation du pignon arbré 8
al'arbre de sortie 15,
FIs: Transmetire Ta rotation de Tarbre de sortie |_|
154 tare de arbre de tambour 19 bev veeeeeeeeeeeeeeeees
1.2-Etude de l’'assemblage du couvercle 11 avec le carter 7:
12.-Donner le nom et le réle de l’éhément 9 : Nom :
Réle:...
1
b-Donner le type des ajustements suivants
- Ajustement entre 9 et 7: seré O) libre 0
~ Ajustement entre 9 et 11: serré 0) libre
13-Donner la nature du lubrifiant utilisé pour l'engrenage (8-12) : Huile CI Graisse 0 (.../0,5PH)
TI- COTATION FONCTIONNELLE : [2 POINTS]
IL1-Justifier la présence de la cote condition J,:
p
/0,SPt)
QC Pignon 47, roue 4 et chaine a roulcaux double de rapport r,~ 2/3.
> Pignon 8 ct roue 12 a denture droite de :
~ Rapport ry= 4/15
- Module de denture m= 2 mm;
~ Entraxe a.g=95 mm ;
Le moteur est de puissance Pm=0,55 Kw et de vitesse de rotation Nm=720 tr/min.
Le rendement global du réducteur 1 = 049.
IL1-Calculer les nombres de dents Zs et Zy2 : (...2Pts)
11.2-Calculer le rapport global rg du réducteur (.../0,5P)
=. 10,5Pt)
IL4-Calculer Ia puissance & la sortie du réducteur (../0,5Pt)
Pis=
IL5-Calculer la valeur du couple appliqué sur l'arbre de sortie 15 : (JP)
Devoir de Synthise N°1 (2017-2018) Page 2/4 Unité De Propuctiox Dé Pots Dé
Labo Mécanique de KORBA itty:/mim& jimdo.com/ Proposé par M Byy Ayla fp
toutes les matiéres, tous les niveaux
Nom & Prénom iN Classe: 4 ScT.
1V- ETUDE DU FREIN : [4 Points}
En se référant au dessin d’ensemble (page 6/6) et & la figure 5 (page 5/6) du dossier technique,
IV.1-Donner le réle du ressort 32 (.../0,5P1)
1V.2-Compléter sur la figure b ci-dessous le schéma cinématique correspondant & la position freinge. (.../IPt)
Figure.a : Position libre Eigure b : Position freinge
(Liaisons masquées)
IV3-Calculer la force de freinage F exereée par le ressort 32 pour assurer un couple de freinage adéquat,
sachant que le coefficient de frottement entre la garniture 34 et le plateau fixe 23 et le plateau mobile 33 est
de f= 0.4 et le moteur est de puissance Pm=0,55 Kw et de vitesse de rotation Nm=720 trimin. ——(..../2,5P1)
(NB: prendre les mesures nécessaires directement du dessin d’ensemble)
nombre desurfaces de contact | Rayons della surface de contact (couronne)
Devoir de Synthése Nl (2017-2018) Page 3/4 Unité De Propuctiox De Pots DE.
Labo Mécanique de KORBA ‘p//mimis fimo com’ Proposé par Mt Byy Ayla fp
toutes les matiéres, tous les niveaux
Nom & Prénom Ne Classe : 4 ScT.
V- PRODUCTION D’U LUTION OU DUNE MODIFICATION : [5,5 Points}
TIL.1-Guidage du pignon arbré 8 :
IIL.1.a-Completer la représentation du guidage en rotation du pignon arbré 8 en assurant le montage des
roulements 6 et 10, (... 2Pts)
IIL.1.b-Réaliser I’étanchéité en complétant le montage du joint & lavres 57. (...10,5P1)
Indiquer les cotes tolérancées des portées des roulements et du joint & lévres. (JP)
I11.2-Encastrement de la roue 4:
I11.2.a-Compléter l’encastrement de la roue double pour chaine 4 avec le pignon arbré 8 en utilisant les
composants normalisés fournis & la page 5/6 du dossier technique. (.../15P5s)
.0,5Pt)
T1L.2.b- Indiquer ’ajustement relatif au montage de la roue.
Eetile 1
Devoir de Synthdse N°1 (2017-2018) Page 4/4 Unité De Propuction De Pots De
Labo Mécanique de KORBA tii jim com Proposé par M Bpp Aaah ga
toutes les matiéres, tous les niveaux
You might also like
- Devoir de Synthèse N°1 2018 2019 (MR Bakini) PDFDocument10 pagesDevoir de Synthèse N°1 2018 2019 (MR Bakini) PDFPiere EbrahimNo ratings yet
- 7-UTT Pour Les LyceensDocument25 pages7-UTT Pour Les LyceensPiere EbrahimNo ratings yet
- Manuel Qualite FRANCAISDocument24 pagesManuel Qualite FRANCAISPiere EbrahimNo ratings yet
- 7228 Magazine Micronora Numero 140 PDFDocument44 pages7228 Magazine Micronora Numero 140 PDFPiere EbrahimNo ratings yet
- 10-Elmahdi Korfed, Yohann Moise, Florian Masse Et Aurore Dechamps-Web Cube 3dDocument16 pages10-Elmahdi Korfed, Yohann Moise, Florian Masse Et Aurore Dechamps-Web Cube 3dPiere EbrahimNo ratings yet
- Les 50 Adjectifs Les Plus Courants en AnglaisDocument4 pagesLes 50 Adjectifs Les Plus Courants en AnglaisHerve Julio KamdemNo ratings yet
- Sommm PDFDocument10 pagesSommm PDFPiere EbrahimNo ratings yet
- Page - de - Garde-1.docx - Filename - UTF-8''page de Garde-1 PDFDocument1 pagePage - de - Garde-1.docx - Filename - UTF-8''page de Garde-1 PDFPiere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2017 2018 (MR Ghorbel Mamdouh) PDFDocument7 pagesDevoir de Synthèse N°1 2017 2018 (MR Ghorbel Mamdouh) PDFPiere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2007 2008 (Région Kairouan)Document15 pagesDevoir de Synthèse N°1 2007 2008 (Région Kairouan)Piere Ebrahim50% (2)
- Formations: Tarek SASSI Ingénieur en Génie IndustrielDocument3 pagesFormations: Tarek SASSI Ingénieur en Génie IndustrielPiere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Document10 pagesDevoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Piere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimNo ratings yet
- Sujet Bac Sti 2010 Genie Mecanique Etudes Des Constructions PDFDocument28 pagesSujet Bac Sti 2010 Genie Mecanique Etudes Des Constructions PDFPiere EbrahimNo ratings yet
- Fiche Programme Management de ProjetDocument1 pageFiche Programme Management de ProjetPiere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2013 2014 (Foussana) PDFDocument4 pagesDevoir de Synthèse N°1 2013 2014 (Foussana) PDFPiere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2013 2014 (Foussana)Document4 pagesDevoir de Synthèse N°1 2013 2014 (Foussana)Piere EbrahimNo ratings yet
- Devoir de Synthèse N°1 2012 2013 (Heni Abdellatif)Document8 pagesDevoir de Synthèse N°1 2012 2013 (Heni Abdellatif)Piere EbrahimNo ratings yet