You might also like
- CCNA 1 - ITN Final PT Skills Assessment ID111Document3 pagesCCNA 1 - ITN Final PT Skills Assessment ID111F gomesNo ratings yet
- Zhen Xian BaoDocument5 pagesZhen Xian Baonoelia cortez100% (2)
- APM 2.5 Arducopter Guide v1.4Document42 pagesAPM 2.5 Arducopter Guide v1.4muhammadjadidNo ratings yet
- Quad-Copter Project 2014Document57 pagesQuad-Copter Project 2014ShaunNo ratings yet
- TB6600 User Guide V1.2Document11 pagesTB6600 User Guide V1.2apic20No ratings yet
- Stepper Motor Drive For Robotic ApplicationsDocument11 pagesStepper Motor Drive For Robotic ApplicationsPrerith Subramanya100% (2)
- K31 ManualDocument3 pagesK31 ManualDavid KasaiNo ratings yet
- Rick Stein - The Road To Mexico - Rick SteinDocument423 pagesRick Stein - The Road To Mexico - Rick Steinpixtaccio75% (4)
- Servo Motor Control With Raspberry Pi: by Lanc1999Document6 pagesServo Motor Control With Raspberry Pi: by Lanc1999Hans Sebastian Navarrete LopezNo ratings yet
- How To Make A Quadcopter at Home PDFDocument10 pagesHow To Make A Quadcopter at Home PDFKULDEEP KUMARNo ratings yet
- Quadcopter PDFDocument14 pagesQuadcopter PDFabhiarora4100% (1)
- DHT Humidity Sensing On Raspberry Pi With Gdocs LoggingDocument15 pagesDHT Humidity Sensing On Raspberry Pi With Gdocs LoggingEdgar RodriguezNo ratings yet
- Drone Build Diagramsv4 PDFDocument60 pagesDrone Build Diagramsv4 PDFDimitri Kabore100% (2)
- Jetson Nano Developer Kit User GuideDocument24 pagesJetson Nano Developer Kit User GuideTamires BernoNo ratings yet
- Raspberry PiDocument12 pagesRaspberry PiYuvaraj YuvarajNo ratings yet
- Hot Wire CNC Foam CutterDocument12 pagesHot Wire CNC Foam CutterrevildaNo ratings yet
- Install OpenCV and Python On Your Raspberry Pi 2 and BDocument41 pagesInstall OpenCV and Python On Your Raspberry Pi 2 and BFranklin Cardeñoso FernándezNo ratings yet
- Raspberry PI RadioDocument241 pagesRaspberry PI RadioAdrian Racataian100% (1)
- Bipolar Stepper Motor Driver 74194Document12 pagesBipolar Stepper Motor Driver 74194mekuannintmesfin100% (2)
- CNC G-Code and M-Code Reference List For CNC MillsDocument5 pagesCNC G-Code and M-Code Reference List For CNC Millssangu1434No ratings yet
- How Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerDocument8 pagesHow Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerSubham GhoshNo ratings yet
- Design of A High Altitude Long Endurance Solar Powered UAVDocument84 pagesDesign of A High Altitude Long Endurance Solar Powered UAVmegustalazorraNo ratings yet
- BeagleBoneBlack TutorialsDocument24 pagesBeagleBoneBlack Tutorialstuyen1989100% (1)
- Using The Raspberry Pi GPIO With Python MaxEmbeddedDocument11 pagesUsing The Raspberry Pi GPIO With Python MaxEmbeddeddanNo ratings yet
- An Itroductory Guide For Operating RC HelicoptersDocument52 pagesAn Itroductory Guide For Operating RC Helicoptersbont3ks100% (2)
- Arduino Uno: Dissolved Oxygen Sample CodeDocument1 pageArduino Uno: Dissolved Oxygen Sample CodeNasyith Hananur RohiemNo ratings yet
- Torque of ThreePhase Induction Motor ExplainedDocument2 pagesTorque of ThreePhase Induction Motor Explainedsaga2000cnNo ratings yet
- Controlling A Stepper Motor With An Arduino - All As PDFDocument11 pagesControlling A Stepper Motor With An Arduino - All As PDFEnnio Antonio100% (2)
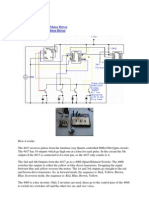
- Unipolar Stepper Motor Driver Bipolar Stepper Motor DriverDocument3 pagesUnipolar Stepper Motor Driver Bipolar Stepper Motor DriverjsriNo ratings yet
- Bluetooth TechnologyDocument23 pagesBluetooth TechnologyBittuNo ratings yet
- Build A Simple PLC Using ArduinoDocument7 pagesBuild A Simple PLC Using ArduinoFredy Peñafiel Paz100% (2)
- Gyro Camera For Motorcycle Using ArduinoDocument8 pagesGyro Camera For Motorcycle Using ArduinoCUIDAITONo ratings yet
- DTPADocument8 pagesDTPAsivamadhaviyamNo ratings yet
- Operating Parameter Programming Module Wam 1019 Indramat Manual PDFDocument11 pagesOperating Parameter Programming Module Wam 1019 Indramat Manual PDFremus popescuNo ratings yet
- Pixhawk Manual Rev3 3Document12 pagesPixhawk Manual Rev3 3Galih NugrahaNo ratings yet
- Programming Manual Mavlink MessageDocument5 pagesProgramming Manual Mavlink MessageMohd Fazri SedanNo ratings yet
- Adafruit Motor Shield v2 For ArduinoDocument47 pagesAdafruit Motor Shield v2 For ArduinoBrandon EricksonNo ratings yet
- KemppiDocument28 pagesKemppiFábio MarquesNo ratings yet
- Smart Home Security System Using Iot, Face Recognition and Raspberry PiDocument4 pagesSmart Home Security System Using Iot, Face Recognition and Raspberry PiBhanu B PrakashNo ratings yet
- Raspberry Pi Zero - Programming Over USB! (Part 2) - Andrew's BlogDocument72 pagesRaspberry Pi Zero - Programming Over USB! (Part 2) - Andrew's BlogTemp FrocNo ratings yet
- QuadCopter Workshop ProposalDocument6 pagesQuadCopter Workshop ProposalVignesh MeganathanNo ratings yet
- Arduino Wireless Receiver - Transmitter Design - DocumentDocument11 pagesArduino Wireless Receiver - Transmitter Design - DocumentRaja Sekhar BatchuNo ratings yet
- How To Build SMPS Transformer Home Make 12V 10A SWDocument11 pagesHow To Build SMPS Transformer Home Make 12V 10A SWwaseem ul haqueNo ratings yet
- Step by Step Guidance To Build A Drone From ScratcHDocument75 pagesStep by Step Guidance To Build A Drone From ScratcHDunia EngineeringNo ratings yet
- KK 2.1 Multi-Rotor Control Board: User GuideDocument14 pagesKK 2.1 Multi-Rotor Control Board: User GuideSandal MasjidNo ratings yet
- Getting Started With Raspberry Pi PicoDocument20 pagesGetting Started With Raspberry Pi Picogulrez1991No ratings yet
- A Raspberry Pi Controlled Mini CNC Laser Engraver (Last Update Dec 18, 2013) - Fun of DIYDocument30 pagesA Raspberry Pi Controlled Mini CNC Laser Engraver (Last Update Dec 18, 2013) - Fun of DIYazir86No ratings yet
- Military RobotsDocument9 pagesMilitary Robotsvincentpvp890% (1)
- Hackatronics Arduino Multi Function ShieldDocument30 pagesHackatronics Arduino Multi Function ShielddadiwahyudiNo ratings yet
- Raspberry Pi 3 Home Automation Based On IoTDocument6 pagesRaspberry Pi 3 Home Automation Based On IoTAlan SagarNo ratings yet
- Arduino - InterruptsDocument58 pagesArduino - Interrupts18018022 I Made Ngurah Chandra Marutha100% (1)
- Using Raspberry Pi With Flowcode 8Document9 pagesUsing Raspberry Pi With Flowcode 8chadij78No ratings yet
- Autonomous QuadcopterDocument22 pagesAutonomous QuadcopterRohan KoliNo ratings yet
- Building and Running Micropython On The Esp8266Document12 pagesBuilding and Running Micropython On The Esp8266elplutoNo ratings yet
- Servo 2008 - 02Document84 pagesServo 2008 - 02Jose SeVi100% (1)
- Virtual WireDocument13 pagesVirtual WirePedro Nuno Sabugueiro OliveiraNo ratings yet
- Autonomous Aerial Mapping: Team Name: Game of Drones AuthorsDocument11 pagesAutonomous Aerial Mapping: Team Name: Game of Drones AuthorsNewMANNo ratings yet
- Getting Started With Raspberry Pi Zero - Sample ChapterDocument30 pagesGetting Started With Raspberry Pi Zero - Sample ChapterPackt Publishing100% (1)
- Building Wireless Sensor Networks Using Arduino - Sample ChapterDocument23 pagesBuilding Wireless Sensor Networks Using Arduino - Sample ChapterPackt Publishing100% (1)
- CNC G-Code and M-Code Reference For CNC MachinesDocument8 pagesCNC G-Code and M-Code Reference For CNC MachinesShashank PathakNo ratings yet
- Raspberry Pi 3 Model B for Beginners: Explore What Raspberry Pi 3 Model B Can DoFrom EverandRaspberry Pi 3 Model B for Beginners: Explore What Raspberry Pi 3 Model B Can DoNo ratings yet
- Commercial and Industrial Internet of Things Applications with the Raspberry Pi: Prototyping IoT SolutionsFrom EverandCommercial and Industrial Internet of Things Applications with the Raspberry Pi: Prototyping IoT SolutionsNo ratings yet
- DO-160G Section 21 4Document1 pageDO-160G Section 21 4JizzPontesNo ratings yet
- FORM B1 Photocopiables 7BDocument1 pageFORM B1 Photocopiables 7BNilda FerrariNo ratings yet
- Macbeth: Introduction To Shakespeare'sDocument26 pagesMacbeth: Introduction To Shakespeare'sAbhinav MalhotraNo ratings yet
- William StracheyDocument5 pagesWilliam StracheyjackNo ratings yet
- ARTAPP - Mini ResearchDocument5 pagesARTAPP - Mini ResearchLIZA MAE NOOLNo ratings yet
- Zhejiang Dihong Home Textiles Co., LTD: InvoiceDocument2 pagesZhejiang Dihong Home Textiles Co., LTD: InvoiceMohammed AlamiNo ratings yet
- DRESSMAKING-10 Q4 Mod4 USLeM-RTPDocument10 pagesDRESSMAKING-10 Q4 Mod4 USLeM-RTPApsimachiaNo ratings yet
- NC3200S CircuitDocument17 pagesNC3200S CircuitHector PerezNo ratings yet
- Max220 Max249 PDFDocument39 pagesMax220 Max249 PDFRahmad MisinNo ratings yet
- Encyclopedia of Chemical Processing and DesignDocument16 pagesEncyclopedia of Chemical Processing and DesignTony Brown100% (3)
- MAPEH 7 - FestivalsDocument14 pagesMAPEH 7 - FestivalsRescher Kim GalinatoNo ratings yet
- 639 Achievement Genshin Impact (1.0-2.6)Document3 pages639 Achievement Genshin Impact (1.0-2.6)IbnuhamsaNo ratings yet
- 7 Powerful Scriptures To Help You Worship GodDocument7 pages7 Powerful Scriptures To Help You Worship GodJuan BagoNo ratings yet
- FDSD ReviewerDocument5 pagesFDSD Reviewerelsansebstian3506qcNo ratings yet
- Specialist-GDMO-Vacancy List Final PDFDocument26 pagesSpecialist-GDMO-Vacancy List Final PDFMeera GouthamNo ratings yet
- The Multi Sited Domestication of The Tape RecorderDocument18 pagesThe Multi Sited Domestication of The Tape RecorderSergio Alejandro Novoa SuárezNo ratings yet
- Brawl Stars A1Document15 pagesBrawl Stars A1Алла Радиюк100% (1)
- The Lost Caverns of Tsojcanth BestiaryDocument41 pagesThe Lost Caverns of Tsojcanth Bestiaryjeffreyquigley4984No ratings yet
- Dyeing and Bleaching Scheme of Work For 3rd Term 2024.Document21 pagesDyeing and Bleaching Scheme of Work For 3rd Term 2024.olatson2.ooNo ratings yet
- FCE ReadingDocument5 pagesFCE ReadingAndrea SantoNo ratings yet
- DX DiagDocument30 pagesDX DiagGaddam SunderpaulNo ratings yet
- COC RuleBookDocument10 pagesCOC RuleBookHello KhemNo ratings yet
- Migrate From Cisco Catalyst 6500 Series Switches To Cisco Nexus 9000 Series SwitchesDocument15 pagesMigrate From Cisco Catalyst 6500 Series Switches To Cisco Nexus 9000 Series SwitchesMuhammad Nadeem KhanNo ratings yet
- Resultados 9M Meliá Hotels International ENGDocument7 pagesResultados 9M Meliá Hotels International ENGd7oombautista1126No ratings yet
- Mike Tyson FinalDocument5 pagesMike Tyson FinalBrian RameyNo ratings yet
- Designstack Com Project SbiDocument6 pagesDesignstack Com Project SbiDezign JetNo ratings yet
- The Role of Tourism and Hospitality inDocument28 pagesThe Role of Tourism and Hospitality inJiks GalleneroNo ratings yet