You might also like
- Eastern College Project on Electricity Billing SystemDocument25 pagesEastern College Project on Electricity Billing SystemAnil Rajbanshi100% (2)
- PF753 QuickConfig Analog Setup ReducedDocument4 pagesPF753 QuickConfig Analog Setup ReducedsulemankhalidNo ratings yet
- S601 Series metal access control manualDocument12 pagesS601 Series metal access control manualNiceMen SafaniNo ratings yet
- Guess Papers Computer Class 10Document4 pagesGuess Papers Computer Class 10Sania Ashir100% (3)
- PS-Full Turnkey Msedcl ProjectDocument46 pagesPS-Full Turnkey Msedcl Projectsachin tiwade67% (6)
- LP7516 Usermanual11.03.02Document54 pagesLP7516 Usermanual11.03.02cristoba muñozNo ratings yet
- P-Series VFD: New Firmware Makes Setup A SnapDocument5 pagesP-Series VFD: New Firmware Makes Setup A SnapConde Garcia CalderonNo ratings yet
- 42pt250b Manual ServicioDocument63 pages42pt250b Manual ServicioLuis Carlos Bonilla AldanaNo ratings yet
- Digital Temperature Controller Operation ManualDocument47 pagesDigital Temperature Controller Operation ManualMADS LABNo ratings yet
- Lp7516 - User ManualDocument28 pagesLp7516 - User Manualabo ziadNo ratings yet
- 890023-03-00 MX Quick StartDocument12 pages890023-03-00 MX Quick StartJose G LopezNo ratings yet
- Service Manual: Home Audio SystemDocument104 pagesService Manual: Home Audio SystemGiancarloRichardRivadeneyraMiranda100% (1)
- LP7510 Manual PDFDocument32 pagesLP7510 Manual PDFIvan Agreda SalvadorNo ratings yet
- RISH Relay Manual Covers Voltage and Current ProtectionDocument68 pagesRISH Relay Manual Covers Voltage and Current ProtectionNguyễn Đức LâmNo ratings yet
- Samsung173Pplus ServiceManualDocument64 pagesSamsung173Pplus ServiceManualcheongiNo ratings yet
- Introduction Features: Ultra Fast High PSRR Low Noise CMOS Voltage RegulatorDocument11 pagesIntroduction Features: Ultra Fast High PSRR Low Noise CMOS Voltage RegulatorkalanghoNo ratings yet
- TPD4134KDocument24 pagesTPD4134KMolnar LeventeNo ratings yet
- Heidenhain TNC 151 BQ Conversational ProgrammingDocument371 pagesHeidenhain TNC 151 BQ Conversational ProgrammingFranGiga100% (1)
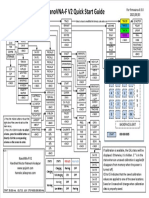
- NanoVNA-F V2 Quick Start Guide - For Firmware v0.3.0Document1 pageNanoVNA-F V2 Quick Start Guide - For Firmware v0.3.0Sasha PkhidenkoNo ratings yet
- GSP-2463 LNL-1320 Series 3 Data Sheet Web PDFDocument2 pagesGSP-2463 LNL-1320 Series 3 Data Sheet Web PDFNainAltuveNo ratings yet
- Manual Teclado Ligthsys - RiscoDocument32 pagesManual Teclado Ligthsys - RiscoLuis Oliver Neciosup VasquezNo ratings yet
- DSE335 Operators ManualDocument2 pagesDSE335 Operators ManualArc HieNo ratings yet
- Sony hcd-d590 xb4Document88 pagesSony hcd-d590 xb4miguel angel jaramilloNo ratings yet
- Sliding Door Control Board SL1600 User Maunal A7Document2 pagesSliding Door Control Board SL1600 User Maunal A7joya100% (1)
- 01 - Cms502-Esquema de Conexion PDFDocument35 pages01 - Cms502-Esquema de Conexion PDFJonas Mendibil PazNo ratings yet
- ForewordDocument199 pagesForeworddavid mauricio0% (2)
- Dy4300 enDocument9 pagesDy4300 enelektrmixNo ratings yet
- Control de Flama Honeywell 215Document12 pagesControl de Flama Honeywell 215Moreno NuevoNo ratings yet
- Sencon Product Guide 5.5.2 1Document64 pagesSencon Product Guide 5.5.2 1letrunghaNo ratings yet
- 74HC373Document5 pages74HC373aasadadNo ratings yet
- Mypin: Resistance Controller User ManualDocument1 pageMypin: Resistance Controller User ManualMarcos Luiz AlvesNo ratings yet
- User Manual Cp1e PDFDocument326 pagesUser Manual Cp1e PDFBagus Dharmawan HadiNo ratings yet
- LG 60PN6500Document34 pagesLG 60PN6500Luis SantosNo ratings yet
- Semikron Datasheet SKKQ 1200 14e 08890060Document4 pagesSemikron Datasheet SKKQ 1200 14e 08890060carlos enrique cuzco garciaNo ratings yet
- RE-2554/8 Fire Alarm PanelDocument2 pagesRE-2554/8 Fire Alarm PanelHamilton GutierrezNo ratings yet
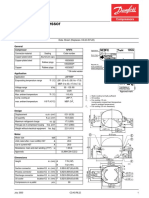
- Nf9Fx Standard Compressor R134a 115-127V 60Hz: CompressorsDocument2 pagesNf9Fx Standard Compressor R134a 115-127V 60Hz: CompressorsGregory Hernandez0% (1)
- Encoder S Short FormDocument2 pagesEncoder S Short FormelecompinnNo ratings yet
- SA-AKX38PH - AKX38PN (sm-PSG1402005CE) PDFDocument70 pagesSA-AKX38PH - AKX38PN (sm-PSG1402005CE) PDFJory2005100% (2)
- BLR CXD Short ManualDocument4 pagesBLR CXD Short ManualRnDES1 CML100% (1)
- XIO Family of Remote BACnet Input - Output Devices Mounting & Wiring InstructionsDocument17 pagesXIO Family of Remote BACnet Input - Output Devices Mounting & Wiring InstructionsSakahi SharmaNo ratings yet
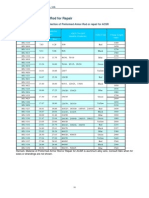
- HX-HR Series Preformed Armor Rods For RepairDocument3 pagesHX-HR Series Preformed Armor Rods For RepairhcindustryNo ratings yet
- xk3102 v60.5Document43 pagesxk3102 v60.5Sach Nguyen100% (1)
- Manual Placa Mãe X10SLL-F Super Micro PDFDocument111 pagesManual Placa Mãe X10SLL-F Super Micro PDFMarceloNo ratings yet
- Gefran 2400Document4 pagesGefran 2400Alexandre CamposNo ratings yet
- Gamewell 7100 Manual PDFDocument50 pagesGamewell 7100 Manual PDFHenrySiviraNo ratings yet
- Yamaha+Htr 3064Document104 pagesYamaha+Htr 3064aainstenNo ratings yet
- 1/16 - 1/8 - 1/4 DIN PROCESS CONTROLLERS MANUALDocument2 pages1/16 - 1/8 - 1/4 DIN PROCESS CONTROLLERS MANUALAnonymous 1aEDoGQNo ratings yet
- Catálogo de Fallas Caterpillar Hombre A Pie NR4500Document20 pagesCatálogo de Fallas Caterpillar Hombre A Pie NR4500Gerardo50% (2)
- SMD-24B-2020-00 Driver: Basic Installation InstructionsDocument3 pagesSMD-24B-2020-00 Driver: Basic Installation InstructionsKien Nguyen TrungNo ratings yet
- Sony KDL - 32L4000 Chasis MA2Document84 pagesSony KDL - 32L4000 Chasis MA2GustavoTovarNo ratings yet
- 1.evolution and Improvement of ARM ArchitectDocument35 pages1.evolution and Improvement of ARM ArchitectRohini0% (1)
- Arm FundamentalsDocument32 pagesArm FundamentalsSatyanarayana SankuNo ratings yet
- Microprocessor Systems & Interfacing EEE-342: Comsats UniversityDocument10 pagesMicroprocessor Systems & Interfacing EEE-342: Comsats UniversityBilal HabibNo ratings yet
- IFAS System Troubleshooting Guide DraftDocument18 pagesIFAS System Troubleshooting Guide Draftsoumya pattanaikNo ratings yet
- ACE201slides 8Document75 pagesACE201slides 8alexistheNo ratings yet
- ARMDocument40 pagesARMhifazat aliNo ratings yet
- E Status ErrorCode r5Document152 pagesE Status ErrorCode r5jesus abel cavazosNo ratings yet
- Install VISTA 4120EC Security SystemDocument17 pagesInstall VISTA 4120EC Security SystemlevitagamerNo ratings yet
- 8259 Complete NotesDocument34 pages8259 Complete NotesAntra GurainNo ratings yet
- How To Analyse and Solve RTWP IssueDocument16 pagesHow To Analyse and Solve RTWP IssuerimouchaNo ratings yet
- v1.0 IWM-LR3 LR4 UM ENDocument21 pagesv1.0 IWM-LR3 LR4 UM ENCarlos LeyvaNo ratings yet
- ArmDocument44 pagesArmSiva SankaranNo ratings yet
- Valve Brevini 2 PDFDocument274 pagesValve Brevini 2 PDFJose100% (1)
- DIA5ED2121212ENDocument118 pagesDIA5ED2121212ENNoe CastroNo ratings yet
- Manual Fallos Hidramat Español PDFDocument114 pagesManual Fallos Hidramat Español PDFNoe CastroNo ratings yet
- Manual Fallos Hidramat Español PDFDocument114 pagesManual Fallos Hidramat Español PDFNoe CastroNo ratings yet
- DIA5ED2121212ENDocument118 pagesDIA5ED2121212ENNoe CastroNo ratings yet
- Datalogic Safety Light Curtains - Advanced Series, Hand-SafeDocument17 pagesDatalogic Safety Light Curtains - Advanced Series, Hand-SafeNoe CastroNo ratings yet
- Introduction To Computer Science - Mark McIlroyDocument280 pagesIntroduction To Computer Science - Mark McIlroyRajNo ratings yet
- Unit 4 (C++) - Part TwoDocument54 pagesUnit 4 (C++) - Part TwoabdiNo ratings yet
- A Cracking Tutorial For NewbiesDocument18 pagesA Cracking Tutorial For NewbiesDio NgapokinNo ratings yet
- LMDB - How To Assign Product System in SOL..Document15 pagesLMDB - How To Assign Product System in SOL..vaibhav_taNo ratings yet
- Page Break Per No of RecordsDocument9 pagesPage Break Per No of RecordsRam PraneethNo ratings yet
- Understanding Structure: Instructor's Manual Table of ContentsDocument10 pagesUnderstanding Structure: Instructor's Manual Table of ContentsLeonard GojerNo ratings yet
- 18CS61 - SS and C - Module 5Document36 pages18CS61 - SS and C - Module 5Juice KudityaNo ratings yet
- Getting StartedDocument10 pagesGetting StartedBryan Tevillo100% (1)
- Siren Project With Pic MicrocontrollerDocument12 pagesSiren Project With Pic MicrocontrollerMatthew Hunter100% (1)
- Wiley - Macromedia Flash MX Actionscript For DummiesDocument39 pagesWiley - Macromedia Flash MX Actionscript For DummiesleustaquiosNo ratings yet
- Funbasicf 77Document4 pagesFunbasicf 77Emmanuel Olguin CallejasNo ratings yet
- 10th Class Computer Science Notes by Sir TahirDocument15 pages10th Class Computer Science Notes by Sir TahirTahir MehmoodNo ratings yet
- How To Add Custom Field To Condition TableDocument4 pagesHow To Add Custom Field To Condition Tableumesh.soniNo ratings yet
- IV. Go To Statement.: Goto GotoDocument2 pagesIV. Go To Statement.: Goto GotosrivatsaNo ratings yet
- PLSQL CoursewareDocument82 pagesPLSQL CoursewareVeerendra BodduNo ratings yet
- BADI Vs Customer ExitDocument4 pagesBADI Vs Customer Exitnithesh nithuNo ratings yet
- 03 - Control Statements - Selection PDFDocument7 pages03 - Control Statements - Selection PDFNicuNo ratings yet
- IRC5 Additional Options 3HAC023668 001 - RevDocument66 pagesIRC5 Additional Options 3HAC023668 001 - RevyangardaixNo ratings yet
- RFC For CRM & IS-UDocument76 pagesRFC For CRM & IS-URajkumar Deshetti100% (1)
- CPP Unit 2 SlidesDocument65 pagesCPP Unit 2 SlidesChinmayee BhatNo ratings yet
- 10 - Debugging and Error HandlingDocument41 pages10 - Debugging and Error HandlingDoolaNo ratings yet
- Intermidiate Code GeneratorDocument29 pagesIntermidiate Code GeneratorAkshat MittalNo ratings yet
- Programming in CDocument56 pagesProgramming in CJazz Virak100% (1)
- J 3675 6Document146 pagesJ 3675 6Hamza Younes BlanghapsNo ratings yet
- PERL Cheat SheetDocument3 pagesPERL Cheat SheetAnupam LalitNo ratings yet
- Adding Vendor Details to CJI3 ReportDocument53 pagesAdding Vendor Details to CJI3 ReportKamalakar NowgaroNo ratings yet
- Document 1344854 - Customize Project Supplier Invoice Account Generator WorkflowDocument23 pagesDocument 1344854 - Customize Project Supplier Invoice Account Generator WorkflowNgọc Hoàng TrầnNo ratings yet