You might also like
- Akiyama - Pulsar LE PDFDocument1 pageAkiyama - Pulsar LE PDFEsthevan CevallosNo ratings yet
- Modeling The Impact of Substations On Distribution ReliabilityDocument1 pageModeling The Impact of Substations On Distribution ReliabilityEsthevan CevallosNo ratings yet
- Reliability Modeling and Criticality Ranking of Power SubstationDocument5 pagesReliability Modeling and Criticality Ranking of Power SubstationEsthevan CevallosNo ratings yet
- IEEE 34 Node Test Feede - 2Document6 pagesIEEE 34 Node Test Feede - 2Esthevan CevallosNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Adobe Premiere PreciceDocument7 pagesAdobe Premiere Preciceivicans2972No ratings yet
- 2.3.3.5 Lab - Configuring A Switch Management AddressDocument8 pages2.3.3.5 Lab - Configuring A Switch Management AddressNicolas Bonina33% (3)
- VXI-11 SpecDocument66 pagesVXI-11 SpecppatstewNo ratings yet
- Ch02 1 Decision Modelling With Excel Part One Ver2 0506Document4 pagesCh02 1 Decision Modelling With Excel Part One Ver2 0506Jai GaizinNo ratings yet
- RATAN CHANDRA ROY - CVDocument3 pagesRATAN CHANDRA ROY - CVRatan RoyNo ratings yet
- Srinivas ResumeDocument3 pagesSrinivas Resumeanon-758886No ratings yet
- File Transfer ProtocolDocument7 pagesFile Transfer ProtocolKrishnasami. SNo ratings yet
- GlobalLogic Sample Programming Placement Paper Level1Document20 pagesGlobalLogic Sample Programming Placement Paper Level1placementpapersampleNo ratings yet
- AISG Antenna Port Color Coding Paper TP PDFDocument22 pagesAISG Antenna Port Color Coding Paper TP PDFSudipto MitraNo ratings yet
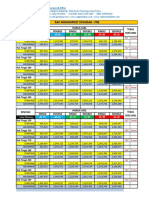
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDocument6 pagesRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraNo ratings yet
- CCNP Examen 5Document10 pagesCCNP Examen 5pardoloNo ratings yet
- Arch Linux Handbook A Simple Lightweight Linux Handbook: Read/DownloadDocument3 pagesArch Linux Handbook A Simple Lightweight Linux Handbook: Read/Downloadnurcholis majidNo ratings yet
- T3TWS1.Introduction To SOA-R15Document34 pagesT3TWS1.Introduction To SOA-R15federsNo ratings yet
- 2018 Salman Sarfraz Implementinga Preventive Maintenance Planning ModelDocument5 pages2018 Salman Sarfraz Implementinga Preventive Maintenance Planning ModelRudi SuherlanNo ratings yet
- Cicero - de Officiis - Ed. Miller 1913 (Loeb)Document452 pagesCicero - de Officiis - Ed. Miller 1913 (Loeb)pincemesterNo ratings yet
- Current ConveyorDocument7 pagesCurrent ConveyorAvinash SinghNo ratings yet
- c0918170 RPG 400 ReferenceDocument486 pagesc0918170 RPG 400 ReferencedsilvaptNo ratings yet
- Module 1 ITC 111Document30 pagesModule 1 ITC 111Mike OrdonioNo ratings yet
- Chapter14 Information Systems Security and ControlDocument44 pagesChapter14 Information Systems Security and ControlVijesh KumarNo ratings yet
- HDR ExplainedDocument16 pagesHDR ExplaineddulishaNo ratings yet
- Ip Camera ManualDocument66 pagesIp Camera ManualEinar RolandNo ratings yet
- S - 4 HANA Credit CardDocument14 pagesS - 4 HANA Credit CardSurani shaiNo ratings yet
- SYS210 Final Revision 2021-2022 SpringDocument11 pagesSYS210 Final Revision 2021-2022 SpringRefalz AlkhoNo ratings yet
- Facets Test Factory PDFDocument4 pagesFacets Test Factory PDFArnabNo ratings yet
- Csc101 Ict Lab Manual v2.0Document117 pagesCsc101 Ict Lab Manual v2.0Asjad HashmiNo ratings yet
- 3rd Sem Practical ListDocument9 pages3rd Sem Practical ListJignesh MahajanNo ratings yet
- India Insurance Perspective PDFDocument24 pagesIndia Insurance Perspective PDFaishwarya raikarNo ratings yet
- Kubernetes Threat ModelDocument56 pagesKubernetes Threat ModelSudeep BatraNo ratings yet
- ApekshaDocument2 pagesApekshaShubh TripathiNo ratings yet
- PriceList - 2016 July 15Document30 pagesPriceList - 2016 July 15crys suryo prayogoNo ratings yet