You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Orange Key Guide For GuidesDocument93 pagesOrange Key Guide For GuidesJake CorreiaNo ratings yet
- Bolton Footwear Company Profile 1 1Document11 pagesBolton Footwear Company Profile 1 1Amaljith AnuNo ratings yet
- Irjet V7i6184Document6 pagesIrjet V7i6184tran the bao100% (1)
- Dallali ICM 2013Document6 pagesDallali ICM 2013tran the baoNo ratings yet
- Tu Dong Hoa Qua Trinh San Xuat Nguyen Anh Duy Altivar 11 Quick Reference Guide en T8841ho0701ep r0 (Cuuduongthancong - Com)Document2 pagesTu Dong Hoa Qua Trinh San Xuat Nguyen Anh Duy Altivar 11 Quick Reference Guide en T8841ho0701ep r0 (Cuuduongthancong - Com)tran the baoNo ratings yet
- Towards Safety in Human Robot InteractionDocument4 pagesTowards Safety in Human Robot Interactiontran the baoNo ratings yet
- Algorithms For Building Annular Structures With Minimalist Robots Inspired by Brood Sorting in Ant ColoniesDocument22 pagesAlgorithms For Building Annular Structures With Minimalist Robots Inspired by Brood Sorting in Ant Coloniestran the baoNo ratings yet
- Dynamic Stair Walking of Biped Humanoid RobotsDocument6 pagesDynamic Stair Walking of Biped Humanoid Robotstran the baoNo ratings yet
- Bosaeng JayaDocument8 pagesBosaeng JayaiqbalarianNo ratings yet
- SP16 RCDocument1 pageSP16 RCmaheshu78No ratings yet
- Microprocessor Knee UnitsDocument54 pagesMicroprocessor Knee UnitsKumar BalramNo ratings yet
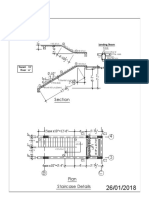
- Typical Staircase Structural DetailsDocument1 pageTypical Staircase Structural DetailsINIMFON JAMESNo ratings yet
- Leather Exporters DataDocument44 pagesLeather Exporters DataPranav khullarNo ratings yet
- PE Scheme Junior InfantsDocument3 pagesPE Scheme Junior InfantsfionamacoscarNo ratings yet
- Morgan, Louisa J. - Walking + For Health and Fitness (2021)Document179 pagesMorgan, Louisa J. - Walking + For Health and Fitness (2021)tomarentNo ratings yet
- Delaying Mobility Disability in People With Parkinson Disease Using A Sensorimotor Agility Exercise ProgramDocument11 pagesDelaying Mobility Disability in People With Parkinson Disease Using A Sensorimotor Agility Exercise ProgramemilyballNo ratings yet
- Fascia Sport ZornDocument11 pagesFascia Sport ZornJennifer EdwardsNo ratings yet
- Electrical Resistant Heavy Duty Safety Shoes With MidsoleDocument3 pagesElectrical Resistant Heavy Duty Safety Shoes With MidsoleEunice GayetaNo ratings yet
- Post Operative Management - TKRDocument31 pagesPost Operative Management - TKRselva5252No ratings yet
- HydraulicallyDocument285 pagesHydraulicallyChinh Hoang QuangNo ratings yet
- Research Paper On Klann MechanismDocument8 pagesResearch Paper On Klann Mechanismaflbtcxfc100% (1)
- Of In: To OnDocument3 pagesOf In: To OnRayudu VVSNo ratings yet
- Carnival MaskDocument22 pagesCarnival Maskapi-341401536No ratings yet
- Second Floor Plan of Shopping Mall: DN DN DN DN DN DN DNDocument1 pageSecond Floor Plan of Shopping Mall: DN DN DN DN DN DN DNKripasindhu BordoloiNo ratings yet
- Multiple Sclerosis and Mobility-Related Assistive Technology: Systematic Review of LiteratureDocument12 pagesMultiple Sclerosis and Mobility-Related Assistive Technology: Systematic Review of LiteratureVhiena ShittaNo ratings yet
- Myntra DatasetDocument291 pagesMyntra Datasetrajatshubham.sharma9No ratings yet
- Return DemonstrationDocument8 pagesReturn DemonstrationCDT Feliciano Fernando JardelezaNo ratings yet
- Gait Based Biometric SystemDocument41 pagesGait Based Biometric SystemSwastikNo ratings yet
- Easy Shoe Size Conversion Charts US UK EURODocument1 pageEasy Shoe Size Conversion Charts US UK EUROkaiNo ratings yet
- Otago Exercise ProgrammeDocument71 pagesOtago Exercise Programmesavvy_as_98-1100% (1)
- Book 7Document96 pagesBook 7Diamond Footwear KhadimsNo ratings yet
- The Developement of Mature GaitDocument8 pagesThe Developement of Mature GaitBoris lanchovNo ratings yet
- Loake Aw18 CollectionDocument2 pagesLoake Aw18 Collectionmartin9947No ratings yet
- 2001 Ewing Cervero - Travel and Built Environment - A SynthesisDocument28 pages2001 Ewing Cervero - Travel and Built Environment - A SynthesisIrfan Rachman Widjaja K.No ratings yet
- Inglês Aceleração WhereDocument1 pageInglês Aceleração WhereALENo ratings yet
- 3D L-Shaped Winder Staircase Calculator - Building Materials & Winder Staircase Dimensions Calculator Online - Perpendicular - ProDocument5 pages3D L-Shaped Winder Staircase Calculator - Building Materials & Winder Staircase Dimensions Calculator Online - Perpendicular - ProMarx QuebralNo ratings yet