You might also like
- Model Assisted Survey SamplingDocument8 pagesModel Assisted Survey SamplingAnonymous UE1TSL0% (4)
- Static Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALDocument8 pagesStatic Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALjssrikantamurthyNo ratings yet
- Adaptive Control: Presented by Harikrishna Satish.TDocument22 pagesAdaptive Control: Presented by Harikrishna Satish.THari ThotaNo ratings yet
- 2997-Sobolev Spaces - With Applications To Elliptic Partial Differential Equations (2nd)Document896 pages2997-Sobolev Spaces - With Applications To Elliptic Partial Differential Equations (2nd)Shu Shujaat Lin100% (1)
- Fortran Program For Solving 2Document15 pagesFortran Program For Solving 2Abhijit Kushwaha100% (1)
- Symmetrical Faults Part I PDFDocument39 pagesSymmetrical Faults Part I PDFGunjan lalakiya100% (2)
- Unit-VDocument164 pagesUnit-VPoreddy vineelaNo ratings yet
- 07 TT 02 HVT SVCsDocument3 pages07 TT 02 HVT SVCsStevenMvuyanaNo ratings yet
- LCL Filter 2Document5 pagesLCL Filter 2Hasib PeyalNo ratings yet
- Mechanics of MachinesDocument4 pagesMechanics of MachinesKabir Bashir Shariff100% (1)
- Lec 12 Design of An EAFDocument14 pagesLec 12 Design of An EAFSakunaPappu100% (1)
- Energy ConsumptionDocument5 pagesEnergy ConsumptionjeffmathNo ratings yet
- Classification of CostDocument33 pagesClassification of CostGeet SharmaNo ratings yet
- Applied Thermodynamics QBDocument12 pagesApplied Thermodynamics QBapi-25999517100% (1)
- 10.1007@978 3 030 31019 6 PDFDocument784 pages10.1007@978 3 030 31019 6 PDFHAROLD FABIAN MURCIA MORENO100% (1)
- Comms 4 Satcom AnswersDocument5 pagesComms 4 Satcom AnswersKassandra Kay Fabia MislangNo ratings yet
- TeleTraffic For BeginnersDocument22 pagesTeleTraffic For BeginnersSaadat RehmanNo ratings yet
- 7-1 (Combined Bending and Axial Load)Document10 pages7-1 (Combined Bending and Axial Load)Ruben Ham Caba HizukaNo ratings yet
- Automatic Control Systems With MATLAB, 2nd Edition (S. Palani)Document922 pagesAutomatic Control Systems With MATLAB, 2nd Edition (S. Palani)biobalamtechNo ratings yet
- Tsgenco-Exam Syllabus PDFDocument9 pagesTsgenco-Exam Syllabus PDForaclerca1No ratings yet
- Fuzzy CDocument1 pageFuzzy Csageson_m-1No ratings yet
- CHAPTER1 Signals and SpectraDocument38 pagesCHAPTER1 Signals and SpectraGita Eka RamadhaNo ratings yet
- Festo Students enDocument6 pagesFesto Students enEKANSH SHARMANo ratings yet
- Leanix - Agile Enterprise Architecture FrameworkDocument1 pageLeanix - Agile Enterprise Architecture FrameworkPaul Vintimilla CarrascoNo ratings yet
- 716 - UniGear ZS2 With VD4 05Document6 pages716 - UniGear ZS2 With VD4 05srmohapatra5086No ratings yet
- Tip Speed Ratio Pma PDFDocument5 pagesTip Speed Ratio Pma PDF1382aceNo ratings yet
- Thermocouple Type Instruments Construction Principle of Operation - Electrical4uDocument7 pagesThermocouple Type Instruments Construction Principle of Operation - Electrical4unitish kumarNo ratings yet
- Advanced Power ElectronicsDocument4 pagesAdvanced Power ElectronicsLinkan PriyadarsiniNo ratings yet
- Green Steel & Its Production Technologies: Aditya Shankar Routray ROLL NO-26614 REGD NO-0701105140Document28 pagesGreen Steel & Its Production Technologies: Aditya Shankar Routray ROLL NO-26614 REGD NO-0701105140Aditya ShankarNo ratings yet
- 01 Modelling and SimulationDocument18 pages01 Modelling and SimulationMuslihNo ratings yet
- Impact of Artificial Intelligence, and The Fourth Industrial Revolution On Business SuccessDocument1,026 pagesImpact of Artificial Intelligence, and The Fourth Industrial Revolution On Business SuccessMEKamilNo ratings yet
- Integration of IoT and Smart Grid To Reduce Line LossesDocument5 pagesIntegration of IoT and Smart Grid To Reduce Line LossesHgoglezNo ratings yet
- CIM Lecture Notes 12Document13 pagesCIM Lecture Notes 12Babatunde Victor JuniorNo ratings yet
- Smart GridDocument30 pagesSmart GridkumarchaturvedulaNo ratings yet
- Control System II - Lecture NotesDocument78 pagesControl System II - Lecture Notes34plt34No ratings yet
- Table Lamp Project - Isometric DrawingDocument1 pageTable Lamp Project - Isometric DrawingDTSCMSNo ratings yet
- Reflectors DimensionDocument6 pagesReflectors DimensionedumacerenNo ratings yet
- Project SchedulingDocument17 pagesProject SchedulingSolomon W. DemissieNo ratings yet
- Finite Element Methods: Lecture Module 1-1: IntroductionDocument35 pagesFinite Element Methods: Lecture Module 1-1: IntroductionAhmad Faidhi100% (1)
- BJT AC Analysis Part 1 PDFDocument9 pagesBJT AC Analysis Part 1 PDFnupur kesarwaniNo ratings yet
- Classification of Electrical System According To Neutral DistributionDocument36 pagesClassification of Electrical System According To Neutral DistributionMohammedSaadaniHassaniNo ratings yet
- M 307 Inverse Laplace PracticeDocument2 pagesM 307 Inverse Laplace PracticeLesly Ann Pauline ManaoatNo ratings yet
- Thesis Poster FinalDocument1 pageThesis Poster Finalapi-371237588No ratings yet
- Case Study in Industrialized Building System (IBS)Document17 pagesCase Study in Industrialized Building System (IBS)Mohamed A. SattiNo ratings yet
- Project Planning: CIS 375 Bruce R. Maxim UM-DearbornDocument17 pagesProject Planning: CIS 375 Bruce R. Maxim UM-DearbornSolomon W. DemissieNo ratings yet
- Power Theft Detection by Using GSM-IJAERDV05I0558136Document6 pagesPower Theft Detection by Using GSM-IJAERDV05I0558136Urooj ButtNo ratings yet
- Errors in MeasurementDocument35 pagesErrors in MeasurementananthakrishnanNo ratings yet
- Solar Position Algorithm (SPA) : S7-1200 V4.x / TIAP V15.1 / TIAP Library & MATLAB ModelDocument19 pagesSolar Position Algorithm (SPA) : S7-1200 V4.x / TIAP V15.1 / TIAP Library & MATLAB ModelMauricio Parada ZuñigaNo ratings yet
- 12 SC Diode Equivalent CircuitsDocument10 pages12 SC Diode Equivalent CircuitsEng-Mohammed KayedNo ratings yet
- The Role of Mechanical Engineer in Building The SocietyDocument2 pagesThe Role of Mechanical Engineer in Building The SocietyAnand MaldhureNo ratings yet
- Sap DesignDocument1 pageSap DesignCIVIL100No ratings yet
- 5.a Conceptual Framework For Smart GridDocument4 pages5.a Conceptual Framework For Smart GridpaulshuvaNo ratings yet
- Multiple Output Smps Using A Single Cuk Converter: Jbvreddy@nic - in Bhuvan@ee - Iitd.ernet - inDocument6 pagesMultiple Output Smps Using A Single Cuk Converter: Jbvreddy@nic - in Bhuvan@ee - Iitd.ernet - indan1007No ratings yet
- Section 2Document76 pagesSection 2Ting Wee KietNo ratings yet
- Power Plant Instrumentation: Lecture NotesDocument35 pagesPower Plant Instrumentation: Lecture NotesmaanwarNo ratings yet
- Thesis PEMFC Contol PDFDocument98 pagesThesis PEMFC Contol PDFZafar Iqbal KhattakNo ratings yet
- Lecture 6 JointsDocument16 pagesLecture 6 JointsRida E Zahra100% (1)
- Comsol CookbookDocument18 pagesComsol CookbookTochi Krishna AbhishekNo ratings yet
- Difference Between PERT & CPMDocument1 pageDifference Between PERT & CPMChandra Sekhar ChittineniNo ratings yet
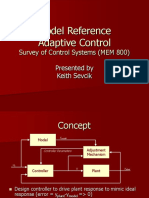
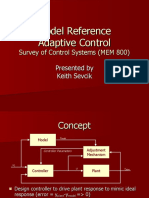
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Document26 pagesModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNo ratings yet
- Survey of Control Systems (MEM 800) PresentedDocument26 pagesSurvey of Control Systems (MEM 800) PresentedvananhbarcaNo ratings yet
- IMC-Based PID Controllers Design For Torsional Vibration SystemDocument4 pagesIMC-Based PID Controllers Design For Torsional Vibration SystemHilton SeheresNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Driving Electrostatic TransducersDocument8 pagesDriving Electrostatic TransducersHữu Thịnh ĐỗNo ratings yet
- Electric Motor Cooling Systems: Welkon LimitedDocument6 pagesElectric Motor Cooling Systems: Welkon LimitedHữu Thịnh ĐỗNo ratings yet
- Newly Developed Motor Cooling Method Using Refrigerant: Hidemasa Fujita, Atsushi Itoh and Tohru UranoDocument10 pagesNewly Developed Motor Cooling Method Using Refrigerant: Hidemasa Fujita, Atsushi Itoh and Tohru UranoHữu Thịnh ĐỗNo ratings yet
- Ed CHM e 1019754 03 2017 V02 PDFDocument40 pagesEd CHM e 1019754 03 2017 V02 PDFHữu Thịnh ĐỗNo ratings yet
- Lecture5 LQR PDFDocument54 pagesLecture5 LQR PDFHữu Thịnh ĐỗNo ratings yet
- Energies 12 02248 PDFDocument18 pagesEnergies 12 02248 PDFHữu Thịnh ĐỗNo ratings yet
- BMD Permanent Magnet AC Synchronous Motors - ENG - R03 - 0 PDFDocument70 pagesBMD Permanent Magnet AC Synchronous Motors - ENG - R03 - 0 PDFHữu Thịnh ĐỗNo ratings yet
- AC Servo Motor & D2 Drive: Technical InformationDocument41 pagesAC Servo Motor & D2 Drive: Technical InformationHữu Thịnh ĐỗNo ratings yet
- Grade 7-Semi-Detailed-Lesson-Plan-In-Measure-Of-Central-TendencyDocument3 pagesGrade 7-Semi-Detailed-Lesson-Plan-In-Measure-Of-Central-TendencyJinky Flores100% (1)
- LQG/LQR Controller Design: Undergraduate Lecture Notes OnDocument37 pagesLQG/LQR Controller Design: Undergraduate Lecture Notes OnJován MéridaNo ratings yet
- Tutorial 2 Integration by Parts, Trigo Integrals, Inverse Trigo and Partial FractionsDocument6 pagesTutorial 2 Integration by Parts, Trigo Integrals, Inverse Trigo and Partial FractionsAinnur SyabihaNo ratings yet
- MATH-351 - Numerical MethodsDocument3 pagesMATH-351 - Numerical MethodsHaris AsifNo ratings yet
- Mathematics Program Afa Semester 1 AM015 Set 6 Session 2020/2021Document2 pagesMathematics Program Afa Semester 1 AM015 Set 6 Session 2020/2021Hyerin ParkNo ratings yet
- Lakmali Jayarathna ThesisDocument209 pagesLakmali Jayarathna ThesisMohammad DalviNo ratings yet
- Fourier Series Notes PDFDocument39 pagesFourier Series Notes PDFsudarshan poojaryNo ratings yet
- 16 - Chapter 6Document5 pages16 - Chapter 6Fasil ParuvanathNo ratings yet
- Data Mining-All CorrectDocument2 pagesData Mining-All CorrectAmit Kumar0% (1)
- ConvolutionDocument5 pagesConvolutionmohanNo ratings yet
- Ichimoku Kinko HyoDocument33 pagesIchimoku Kinko HyoAhmed NabilNo ratings yet
- Class XII AR & CB Question Bank ZIET BhubaneshwarDocument301 pagesClass XII AR & CB Question Bank ZIET Bhubaneshwaranime loverNo ratings yet
- Förster Resonance Energy Transfer (FRET)Document8 pagesFörster Resonance Energy Transfer (FRET)ARUN K CHOCKALINGAMNo ratings yet
- Quantitative Methods - Midterm Exam- شعبة 2Document4 pagesQuantitative Methods - Midterm Exam- شعبة 2Nourhan KhaledNo ratings yet
- Data Analysis: Unit 4 - IIDocument7 pagesData Analysis: Unit 4 - IIFarshan SulaimanNo ratings yet
- Assignment 2 Mat435Document2 pagesAssignment 2 Mat435Arsene LupinNo ratings yet
- PH Lab ReportDocument2 pagesPH Lab Reportapi-252514594No ratings yet
- Chapter 2 (8 Lectures)Document23 pagesChapter 2 (8 Lectures)mayankNo ratings yet
- Deleted Ex Wise Class 12Document2 pagesDeleted Ex Wise Class 1227 ROHIT XII ANo ratings yet
- Null 2Document53 pagesNull 2Rami GhalibNo ratings yet
- Math 104 Final NotesDocument6 pagesMath 104 Final NotesRocky Kamen-Rubio100% (2)
- Arithmetic and Geometric ProgressionsDocument2 pagesArithmetic and Geometric Progressionsapi-3736964No ratings yet
- Chapter 5 &6 Differentiation &its Applications: Quotient RuleDocument2 pagesChapter 5 &6 Differentiation &its Applications: Quotient RuleRahul SinghNo ratings yet
- Oct 2017Document44 pagesOct 2017SandeshNo ratings yet
- Spectral Analysis of SignalsDocument0 pagesSpectral Analysis of Signalssouvik5000No ratings yet
- Partial Differential Equations For Engin PDFDocument141 pagesPartial Differential Equations For Engin PDFمصطفى العباديNo ratings yet
- Critical Path Analysis: Figure 2.1 Activities For Gelletieys Shoes Production ProjectDocument2 pagesCritical Path Analysis: Figure 2.1 Activities For Gelletieys Shoes Production ProjectNUR ASYIQIN BINTI AZAHARNo ratings yet