You might also like
- Embitel IOT SolarEnergyDocument22 pagesEmbitel IOT SolarEnergyPrasanth VarasalaNo ratings yet
- Coperative Control - PVDocument58 pagesCoperative Control - PVPrasanth VarasalaNo ratings yet
- Energy TransitionDocument30 pagesEnergy TransitionPrasanth VarasalaNo ratings yet
- AICTE-SRKNEC Talk by Saugata S. Biswas - For PostingDocument17 pagesAICTE-SRKNEC Talk by Saugata S. Biswas - For PostingPrasanth VarasalaNo ratings yet
- Aspects of Grid Interfacing of Photovoltaic SystemsDocument71 pagesAspects of Grid Interfacing of Photovoltaic SystemsPrasanth VarasalaNo ratings yet
- Introduction To IoT PlatformDocument17 pagesIntroduction To IoT PlatformPrasanth VarasalaNo ratings yet
- RCoEM FDP Sumedh v2Document24 pagesRCoEM FDP Sumedh v2Prasanth VarasalaNo ratings yet
- Iot - Market, Value Chain, Technology, Solution: December, 2020Document41 pagesIot - Market, Value Chain, Technology, Solution: December, 2020Prasanth VarasalaNo ratings yet
- ECADocument2 pagesECAPrasanth VarasalaNo ratings yet
- Ac LabDocument2 pagesAc LabPrasanth VarasalaNo ratings yet
- CODocument3 pagesCOPrasanth VarasalaNo ratings yet
- Io TDocument2 pagesIo TPrasanth VarasalaNo ratings yet
- Eca LabDocument3 pagesEca LabPrasanth VarasalaNo ratings yet
- SS EceDocument2 pagesSS EcePrasanth VarasalaNo ratings yet
- ACDocument3 pagesACPrasanth VarasalaNo ratings yet
- CSDocument2 pagesCSPrasanth VarasalaNo ratings yet
- Vector Processing-AwareDocument14 pagesVector Processing-AwarePrasanth VarasalaNo ratings yet
- Eee-Easwari Engineering CollegeDocument369 pagesEee-Easwari Engineering CollegePrasanth VarasalaNo ratings yet
- Unit 1 Basic MOS Technology: Figure 1. Moore's LawDocument18 pagesUnit 1 Basic MOS Technology: Figure 1. Moore's LawPrasanth VarasalaNo ratings yet
- STLDDocument2 pagesSTLDPrasanth VarasalaNo ratings yet
- EDCDocument3 pagesEDCPrasanth VarasalaNo ratings yet
- 7.2 Academic AuditDocument2 pages7.2 Academic AuditPrasanth Varasala100% (1)
- Tier 1 Ece-Sona College of Technology PDFDocument698 pagesTier 1 Ece-Sona College of Technology PDFPrasanth Varasala100% (2)
- Lab7 Honors PDFDocument19 pagesLab7 Honors PDFPrasanth VarasalaNo ratings yet
- Digital Design Using Verilog HDL Quick Reference Q&A Short AnswersDocument60 pagesDigital Design Using Verilog HDL Quick Reference Q&A Short Answersmunna1523No ratings yet
- VerilogDocument46 pagesVerilogkritti11100% (3)
- 4-1 Ece-R10Document14 pages4-1 Ece-R10Prasanth VarasalaNo ratings yet
- Vivado Simple Verilog Test FixtureDocument7 pagesVivado Simple Verilog Test FixturePrasanth VarasalaNo ratings yet
- Lab Manual VerilogDocument34 pagesLab Manual VerilogAlexiaVangNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dont Sweat The Small Stuff For Men - Richard CarlsonDocument226 pagesDont Sweat The Small Stuff For Men - Richard CarlsonAaliyah Csmrt100% (1)
- Judicial Affidavit - P:CPL PolutanDocument2 pagesJudicial Affidavit - P:CPL PolutanRain HofileñaNo ratings yet
- Personal and Social AdjustmentDocument10 pagesPersonal and Social AdjustmentMobin AlamNo ratings yet
- HY Endocrine UsmleDocument22 pagesHY Endocrine UsmleNakhal JararNo ratings yet
- Kaos PriaDocument133 pagesKaos PriaUrieNo ratings yet
- ASTM C309: Do Liquid Hardeners Meet This Standard?Document2 pagesASTM C309: Do Liquid Hardeners Meet This Standard?Kishore Nayak kNo ratings yet
- IWGIA Book The Indigenous World 2021 ENGDocument824 pagesIWGIA Book The Indigenous World 2021 ENGREy FOxNo ratings yet
- Sample Cylinders - PGI-CYLDocument8 pagesSample Cylinders - PGI-CYLcalpeeNo ratings yet
- The Production of ParacetamolDocument4 pagesThe Production of ParacetamolBryan Tan100% (2)
- MSDS TSHDocument8 pagesMSDS TSHdwiNo ratings yet
- Pengertian Recount Text Kls 9Document26 pagesPengertian Recount Text Kls 9MARINDRA RETNONo ratings yet
- Kurt SaxonDocument15 pagesKurt Saxonjast_80No ratings yet
- ES 92.05 D1 Fire ProofingDocument18 pagesES 92.05 D1 Fire ProofingKanjana LeardrakNo ratings yet
- Metrel Mi 3290 Earth AnalyserDocument4 pagesMetrel Mi 3290 Earth AnalyserMarijan MustačNo ratings yet
- Retention and Relapse in OrthodonticsDocument48 pagesRetention and Relapse in OrthodonticsSurabhi roy33% (3)
- Master of International HealthDocument5 pagesMaster of International HealthJesper Domincil BayauaNo ratings yet
- Comparative Study of Different Varieties of Rice For Making Homemade Instant CoffeeDocument9 pagesComparative Study of Different Varieties of Rice For Making Homemade Instant CoffeeJhon Kyle RoblesNo ratings yet
- Paper - Impact of Rapid Urbanization On Agricultural LandsDocument10 pagesPaper - Impact of Rapid Urbanization On Agricultural LandsKosar Jabeen100% (1)
- First Quarter Examination For AP 10Document4 pagesFirst Quarter Examination For AP 10Reynan Orillos HorohoroNo ratings yet
- Income Taxation Module Compilation FinalsDocument107 pagesIncome Taxation Module Compilation FinalsJasmine CardinalNo ratings yet
- Key MechanicalDocument72 pagesKey MechanicalDasuki FahmiNo ratings yet
- Paper 4 Nov 2000Document2 pagesPaper 4 Nov 2000MSHNo ratings yet
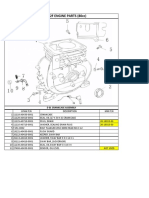
- Lifan 152F Engine Parts (80Cc) : E 01 Crankcase AssemblyDocument13 pagesLifan 152F Engine Parts (80Cc) : E 01 Crankcase AssemblySean MurrayNo ratings yet
- Alcohol Facts and Statistics: Alcohol Use in The United StatesDocument6 pagesAlcohol Facts and Statistics: Alcohol Use in The United StatesVictor EnemNo ratings yet
- Unit of PowerDocument9 pagesUnit of PowerSarathrv RvNo ratings yet
- B SC EVS PDFDocument35 pagesB SC EVS PDFAfroz alamNo ratings yet
- 3RD Summative Exam in Science 6Document6 pages3RD Summative Exam in Science 6Maricris Palermo SancioNo ratings yet
- Method For Emission Spectrometric Analysis of Plain Carbon and Low Alloy Steels Point To Plane Technique (Document8 pagesMethod For Emission Spectrometric Analysis of Plain Carbon and Low Alloy Steels Point To Plane Technique (DiptiNo ratings yet
- Goat Science and Production PDFDocument446 pagesGoat Science and Production PDFRiyaz Khan100% (1)
- Pressure Regulator FRSDocument6 pagesPressure Regulator FRSTobiasAngererNo ratings yet