You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hacker's WhiteBook 2 - 2021 - ANGELSECURITYTEAM PDFDocument304 pagesHacker's WhiteBook 2 - 2021 - ANGELSECURITYTEAM PDFluisNo ratings yet
- Steel PurlinsDocument2 pagesSteel PurlinsZherwin Pascual100% (1)
- 2016 MSC Cut-Off Grade Optimisation For A Bimetallic DepositDocument126 pages2016 MSC Cut-Off Grade Optimisation For A Bimetallic DepositYusuf Efe OzdemirNo ratings yet
- The Impact of Information Technology On PrivacyDocument24 pagesThe Impact of Information Technology On PrivacyMitchelleNo ratings yet
- P4MN Openpit Design by Emma AppianingDocument10 pagesP4MN Openpit Design by Emma AppianingFriederich MarcossyNo ratings yet
- 2019 - Environmental Optimisation of Mine Scheduling Through Life Cycle Assessment IntegrationDocument10 pages2019 - Environmental Optimisation of Mine Scheduling Through Life Cycle Assessment IntegrationYusuf Efe OzdemirNo ratings yet
- 2013 MSC Surface Constrained Stochastic Life-of-Mine Production SchedulingDocument119 pages2013 MSC Surface Constrained Stochastic Life-of-Mine Production SchedulingYusuf Efe OzdemirNo ratings yet
- Inventory: Material Flow SystemsDocument47 pagesInventory: Material Flow Systemsdaniel dongNo ratings yet
- Official Soldier Clerk Paper - (RO (HQ), Danapur) - 1 Nov 2020Document10 pagesOfficial Soldier Clerk Paper - (RO (HQ), Danapur) - 1 Nov 2020Golu SinghNo ratings yet
- HLASM R3 Toolkit Functions Technical OverviewDocument39 pagesHLASM R3 Toolkit Functions Technical Overviewgborja8881331No ratings yet
- Saravali PrathinidhiDocument21 pagesSaravali PrathinidhiJagadish KoppartiNo ratings yet
- Primary 3 Class Allocation 2020: Learning For An Innovative Generation With Handheld Technology (LIGHT)Document49 pagesPrimary 3 Class Allocation 2020: Learning For An Innovative Generation With Handheld Technology (LIGHT)Roslee Bin JalieNo ratings yet
- Product Highlights - 21-02-2023Document60 pagesProduct Highlights - 21-02-2023Deepak SinghNo ratings yet
- QNX Neutrino RTOS Audio Developers GuideDocument344 pagesQNX Neutrino RTOS Audio Developers GuideLarken BradynNo ratings yet
- CEH V11 PRACTICE Practice Test 8Document21 pagesCEH V11 PRACTICE Practice Test 8Alexandros KavNo ratings yet
- ICT581Document8 pagesICT581Keka Sam100% (1)
- CT9 PDFDocument4 pagesCT9 PDFDevendra ShakyawarNo ratings yet
- Aman DT 3.2Document12 pagesAman DT 3.2Dipak RajbharNo ratings yet
- GR 5 - Like Terms Pages 1 - 4 (Merged)Document74 pagesGR 5 - Like Terms Pages 1 - 4 (Merged)svenkatk737No ratings yet
- Libellula - Wizard English ManualDocument46 pagesLibellula - Wizard English ManualodairNo ratings yet
- Elementor Mastery - Build Amazing Websites With Elementor - Master How To Use The Elementor Plugin To Build Amazing Pages and Implement Great Design On Your WordPress Website.Document196 pagesElementor Mastery - Build Amazing Websites With Elementor - Master How To Use The Elementor Plugin To Build Amazing Pages and Implement Great Design On Your WordPress Website.squidxpNo ratings yet
- Only Cash Back Offers April 2022Document22 pagesOnly Cash Back Offers April 2022Hamechander ChanderNo ratings yet
- Laprf Personal Timing System: Operator'S ManualDocument22 pagesLaprf Personal Timing System: Operator'S Manualdbsi batamNo ratings yet
- XDA 1 ManualDocument22 pagesXDA 1 Manualneo2025No ratings yet
- Optima Cat (Print)Document12 pagesOptima Cat (Print)Daniel VargasNo ratings yet
- MTR2000 SCM Field Service 6881096E32-EDocument16 pagesMTR2000 SCM Field Service 6881096E32-EOscar EscobarNo ratings yet
- Recollected - Questions para RepasarDocument8 pagesRecollected - Questions para RepasarEdgar JamilNo ratings yet
- Good Practices PowerPoint TipsDocument1 pageGood Practices PowerPoint TipseildonNo ratings yet
- Space Invaders Shooter TutorialDocument3 pagesSpace Invaders Shooter TutorialKeenan Lucas DarlingtonNo ratings yet
- LogDocument47 pagesLogAgus66 WibowoNo ratings yet
- Azure Portal TerminologyDocument2 pagesAzure Portal TerminologyyNo ratings yet
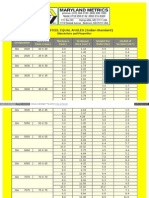
- Rolled Steel Equal Angles (Indian Standard)Document4 pagesRolled Steel Equal Angles (Indian Standard)sandeepricky3dNo ratings yet
- FPC1000 Datasheet ENDocument16 pagesFPC1000 Datasheet ENDidofido FidodidoNo ratings yet
- DBMS Lab Manual-CseDocument45 pagesDBMS Lab Manual-Cse20BECSE028 KIRUBANANDHAM KNo ratings yet