You might also like
- PULSAR 200 DTS-I 200cc SparepartsDocument44 pagesPULSAR 200 DTS-I 200cc SparepartsAlex Rivera50% (2)
- Digital Clock Using ArduinoDocument14 pagesDigital Clock Using Arduinoshivanshu67% (3)
- Manual Manlift 600A - Service - 3120718Document322 pagesManual Manlift 600A - Service - 3120718Yeison RamirezNo ratings yet
- Eye Directive WheelchairDocument4 pagesEye Directive WheelchairRamaswamy SubbiahNo ratings yet
- Eye Directive Wheelchair Project ProgressDocument18 pagesEye Directive Wheelchair Project ProgressSagar walanjNo ratings yet
- Introduction To Accelerometer Controlled Wheel ChairDocument26 pagesIntroduction To Accelerometer Controlled Wheel Chairpradeep100% (1)
- Obstacle avoidance robot using ArduinoDocument7 pagesObstacle avoidance robot using ArduinoPramod TNo ratings yet
- Obstacle Avoidance Robot Using ArduinoDocument5 pagesObstacle Avoidance Robot Using ArduinoRichard Kaven SerquinaNo ratings yet
- Smart Zebra CrossingDocument3 pagesSmart Zebra CrossingInternational Journal of Innovative Science and Research Technology100% (2)
- CCTV Camera Controller Simulation Using Arduino Uno and JoystickDocument10 pagesCCTV Camera Controller Simulation Using Arduino Uno and JoystickEnache AlinNo ratings yet
- EYE DIRECTIVE WHEEL CHAIR MaheshDocument15 pagesEYE DIRECTIVE WHEEL CHAIR MaheshMahesh75% (4)
- Sensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaDocument4 pagesSensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaSwapna GanigaNo ratings yet
- Eye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiraDocument5 pagesEye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiratahaseenNo ratings yet
- Voice Controlled Wheelchair Using Arduino: IarjsetDocument4 pagesVoice Controlled Wheelchair Using Arduino: Iarjsetking girmaNo ratings yet
- .Follower Robotic Cart Using Ultrasonic SensorDocument4 pages.Follower Robotic Cart Using Ultrasonic SensorArvin LanceNo ratings yet
- 61 67Document7 pages61 67VijayNo ratings yet
- Construction and Design of A Camera Stabilizer Based On A Gyroscope and Accelerometer SensorDocument7 pagesConstruction and Design of A Camera Stabilizer Based On A Gyroscope and Accelerometer SensorAyub Anwar M-SalihNo ratings yet
- Automated Gesture Based Wireless Wheelchair Control by Means of AccelerometerDocument5 pagesAutomated Gesture Based Wireless Wheelchair Control by Means of AccelerometerAKHILNo ratings yet
- Autonomous Walking Stick Using Echolocation & Image ProcessingDocument4 pagesAutonomous Walking Stick Using Echolocation & Image ProcessingJaswanth JeshuNo ratings yet
- Line Following For A Mobile Robot: Proceedings of SPIE - The International Society For Optical Engineering October 1995Document9 pagesLine Following For A Mobile Robot: Proceedings of SPIE - The International Society For Optical Engineering October 1995Fayçal BEN HMIDANo ratings yet
- Main Project ReportDocument18 pagesMain Project ReportAbhishek Sai AbhiNo ratings yet
- Brain Controlled Car For Disabled Using Artificial Intelligence IJERTCONV1IS03024Document3 pagesBrain Controlled Car For Disabled Using Artificial Intelligence IJERTCONV1IS03024physics a2100% (1)
- .ZigBee Based Remote Control Automatic Street Light System PDFDocument5 pages.ZigBee Based Remote Control Automatic Street Light System PDFTrầnThanhTấnNo ratings yet
- Intelligent Wireless Video Camera AbstractDocument2 pagesIntelligent Wireless Video Camera Abstractraraju83_366055182No ratings yet
- IR Remote Controlled Dish Positioning System: Kamal Bhatia, Anjana Rani GuptaDocument3 pagesIR Remote Controlled Dish Positioning System: Kamal Bhatia, Anjana Rani GuptaJunias WamilNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- IJCRT2207414 Mini Project Reasearch PaperDocument10 pagesIJCRT2207414 Mini Project Reasearch PaperHimanshu KumarNo ratings yet
- Self Breaking and Safety SystemDocument10 pagesSelf Breaking and Safety SystemTriambikey JoshiNo ratings yet
- Mobility Assistance Robot For Disabled Persons Using Electromyography (EMG) SensorDocument5 pagesMobility Assistance Robot For Disabled Persons Using Electromyography (EMG) SensorMushfiqur Rahman JimNo ratings yet
- Voice Controlled Robotic System Using ArduinoDocument3 pagesVoice Controlled Robotic System Using ArduinoageesNo ratings yet
- Automatic Reverse Braking System: Ketan Meshram, Manish Pawar, Rohan Murkute, Jayesh MahajanDocument3 pagesAutomatic Reverse Braking System: Ketan Meshram, Manish Pawar, Rohan Murkute, Jayesh Mahajanjayesh mahajanNo ratings yet
- Autonomous EyeDocument7 pagesAutonomous EyeAnonymous kw8Yrp0R5rNo ratings yet
- Smart and Safe WheelchairDocument5 pagesSmart and Safe WheelchairAakash SheelvantNo ratings yet
- PC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadDocument4 pagesPC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadRam BadhuNo ratings yet
- Optimization of PID Control For High Speed Line Tracking RobotsDocument8 pagesOptimization of PID Control For High Speed Line Tracking RobotsPiero RaurauNo ratings yet
- Iot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PDocument3 pagesIot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PAhmed ShoeebNo ratings yet
- Collision Avoidance RobotDocument40 pagesCollision Avoidance RobotPraveen ReddyNo ratings yet
- Arduino Obstacle Avoiding Robot ProjectDocument14 pagesArduino Obstacle Avoiding Robot Projecttefflon trolegdyNo ratings yet
- Obstacle Avoiding CarDocument6 pagesObstacle Avoiding CarIJRASETPublicationsNo ratings yet
- Voice Controlled Wheel ChairDocument96 pagesVoice Controlled Wheel ChairbhavanaNo ratings yet
- EEE 3210 Final Project ReportDocument19 pagesEEE 3210 Final Project ReportDerrick ThamNo ratings yet
- Servo Distance 2Document2 pagesServo Distance 2Demon (R.G)No ratings yet
- Intelligent Wireless Video CameraDocument2 pagesIntelligent Wireless Video CameraMurali Sammeta100% (1)
- Arduino Obstacle Avoiding Voice Control Bluetooth Control Robotic Car by Tasfia Sultana 200518Document14 pagesArduino Obstacle Avoiding Voice Control Bluetooth Control Robotic Car by Tasfia Sultana 200518sathiNo ratings yet
- Automatic Braking System: Juwayriyyah Fatima, Muskan Chaudhary, Shweta Singh, Ms Swati SachdevaDocument3 pagesAutomatic Braking System: Juwayriyyah Fatima, Muskan Chaudhary, Shweta Singh, Ms Swati SachdevaKarthik spNo ratings yet
- CE Project-WheelchairDocument24 pagesCE Project-WheelchairHemanth YenniNo ratings yet
- Strike 5 FinalDocument3 pagesStrike 5 FinalAyush ToliaNo ratings yet
- Ijsrp p3807Document4 pagesIjsrp p3807ekyNo ratings yet
- Performance Analysis of Voice Operated Wheel ChairDocument5 pagesPerformance Analysis of Voice Operated Wheel ChairInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Gesture Control RobotDocument17 pagesGesture Control RobotUday Kumar DNo ratings yet
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocument8 pagesBrain Controlled Car For Disabled Using Artificial IntelligenceSrini VasuluNo ratings yet
- Project Report 2Document28 pagesProject Report 2akhileshNo ratings yet
- IRJET - Gesture Controlled Robot With Obs PDFDocument3 pagesIRJET - Gesture Controlled Robot With Obs PDFCarina FelnecanNo ratings yet
- Project MweDocument18 pagesProject Mweanilvs2004No ratings yet
- Bluetooth Controlled 5 Axis Articulated Robot Manipulator With Adaptive GripperDocument5 pagesBluetooth Controlled 5 Axis Articulated Robot Manipulator With Adaptive Grippermb.farooqui02No ratings yet
- Remote-controlled Door Lock System Project ReportDocument7 pagesRemote-controlled Door Lock System Project Reportshruti soniNo ratings yet
- Advance Line Following Robot: Shivam Singh, Prashant KumarDocument3 pagesAdvance Line Following Robot: Shivam Singh, Prashant Kumaranil kasot100% (1)
- Patient Monitoring Smart Wheelchair: September 2015Document5 pagesPatient Monitoring Smart Wheelchair: September 2015morton1472No ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Sem 7 Conference PaperDocument4 pagesSem 7 Conference PaperAmey SawantNo ratings yet
- Voice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoDocument3 pagesVoice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoseventhsensegroupNo ratings yet
- Shen Li Final Paper PDFDocument7 pagesShen Li Final Paper PDFShen LiNo ratings yet
- Rescue Medication and Seizure Emergency Planning in Education SettingsDocument29 pagesRescue Medication and Seizure Emergency Planning in Education SettingsAjeeshNo ratings yet
- Wireless Home Automation System Using ZigBeeDocument6 pagesWireless Home Automation System Using ZigBeeatulNo ratings yet
- Electronic Noses and Their ApplicationsDocument7 pagesElectronic Noses and Their Applicationspavan reddyNo ratings yet
- Electronic Noses and Their ApplicationsDocument7 pagesElectronic Noses and Their Applicationspavan reddyNo ratings yet
- D-I Steering SystemDocument11 pagesD-I Steering SystemTrường Bửu TrầnNo ratings yet
- Telefono Motorola D1001Document45 pagesTelefono Motorola D1001x_crowNo ratings yet
- Gigabyte Ga-h81m-Ds2 Rev. 3.0 - EditDocument29 pagesGigabyte Ga-h81m-Ds2 Rev. 3.0 - Editvandung100% (1)
- CBB21 Metallized Polypropylene Film Capacitor - MPP: Elecsound Electronics Company LimitedDocument2 pagesCBB21 Metallized Polypropylene Film Capacitor - MPP: Elecsound Electronics Company Limitedhamada13No ratings yet
- Lexium 26D Technical DataDocument3 pagesLexium 26D Technical DataLeni Novitasari100% (1)
- CCA India 2020-02-06Document130 pagesCCA India 2020-02-06Vishnupriya Prominance DecoriaNo ratings yet
- Cancoil Fluid Cooler Operate Install ManualDocument4 pagesCancoil Fluid Cooler Operate Install ManualEdgar FloresNo ratings yet
- 7217 en 10Document4 pages7217 en 10AdrianQ.BolivarNo ratings yet
- rc38 Recs For Frost Protection Measures For Sprinklers PDFDocument12 pagesrc38 Recs For Frost Protection Measures For Sprinklers PDFNahado DMNo ratings yet
- 42704-En - FIPWayDocument8 pages42704-En - FIPWayromisfavaNo ratings yet
- Product data sheet specifications analog voltmeter VLTDocument2 pagesProduct data sheet specifications analog voltmeter VLTSajid AkhterNo ratings yet
- 0.0 Koc StdlistDocument13 pages0.0 Koc StdlistMinaAbadirNo ratings yet
- VESDA Laserfocus Trouble Shooting GuideDocument27 pagesVESDA Laserfocus Trouble Shooting Guideesnak62100% (1)
- VM SssssssDocument18 pagesVM Ssssssskalin3169899No ratings yet
- Hardware Staging ChecklistDocument3 pagesHardware Staging ChecklistAlan Mudary100% (1)
- 1997 Harley Davidson Softail Models Parts CatalogDocument498 pages1997 Harley Davidson Softail Models Parts CatalogcoyoteassasinNo ratings yet
- DIY Heated Seats RetrofitDocument27 pagesDIY Heated Seats RetrofitvalymadNo ratings yet
- Tabela de Códigos OBD-2Document4 pagesTabela de Códigos OBD-2RicardoNo ratings yet
- IEC 602dddfdsdDocument2 pagesIEC 602dddfdsdMostafa MohmmedNo ratings yet
- L32W831 L37W8311Document97 pagesL32W831 L37W8311Litman Bocanegra anguloNo ratings yet
- I-V Characteristics of DiodeDocument2 pagesI-V Characteristics of DiodeAsif Zahidul HaqNo ratings yet
- Charge AmpsDocument5 pagesCharge AmpsKrishnamurthy AnantharamakrishnanNo ratings yet
- Three Phase Transformer Connections and BasicsDocument8 pagesThree Phase Transformer Connections and BasicsKarthick RathinasamyNo ratings yet
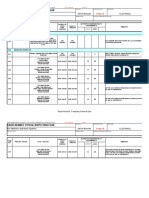
- Saudi Aramco Typical Inspection Plan: Fire Detection and Alarm Systems SATIP-B-014-01 ElectricalDocument18 pagesSaudi Aramco Typical Inspection Plan: Fire Detection and Alarm Systems SATIP-B-014-01 ElectricalSajid ShaikhNo ratings yet
- WEG 10004278046 13617810 r01 CFW700 Adenddum H1as1 en Es PTDocument2 pagesWEG 10004278046 13617810 r01 CFW700 Adenddum H1as1 en Es PTLuanNo ratings yet
- PIC18F24 25Q10 Data Sheet DS40001945B 1365742 PDFDocument770 pagesPIC18F24 25Q10 Data Sheet DS40001945B 1365742 PDFNikhil DeshmukhNo ratings yet
- UsermanualREKA3 3Document8 pagesUsermanualREKA3 3David Lemos Sanchez100% (1)