You might also like
- Elementary Vector AnalysisDocument6 pagesElementary Vector AnalysisrieeNo ratings yet
- Vectors and Matrices, Problem Set 1Document3 pagesVectors and Matrices, Problem Set 1Roy VeseyNo ratings yet
- Lecture3 PDFDocument19 pagesLecture3 PDFM Salman RyanNo ratings yet
- Chapter 3 Vectors in 2-Space and 3-SpaceDocument68 pagesChapter 3 Vectors in 2-Space and 3-SpacesugandirezifNo ratings yet
- Single Mathematics B: Vectors Summary Notes: Ruth GregoryDocument8 pagesSingle Mathematics B: Vectors Summary Notes: Ruth Gregorymuhammad awaisNo ratings yet
- Vectors and TensorsDocument13 pagesVectors and TensorsNithinNo ratings yet
- Chapter 3 Vectors inDocument62 pagesChapter 3 Vectors inAdo ElnandoNo ratings yet
- 07 3DElasticity CompleteDocument45 pages07 3DElasticity CompleteSüleyman TüreNo ratings yet
- MA1513 Chapter 2 Lecture NoteDocument40 pagesMA1513 Chapter 2 Lecture NoteJustin NgNo ratings yet
- Geometry 03Document10 pagesGeometry 03GabiandoNo ratings yet
- Chapter 3Document65 pagesChapter 3LEE LEE LAUNo ratings yet
- AlgadDocument88 pagesAlgadSchiopu GeorgeNo ratings yet
- Section 3: Cross Product of Vectors: Vector AlgebraDocument6 pagesSection 3: Cross Product of Vectors: Vector AlgebraArnab DipraNo ratings yet
- Chapter 2Document35 pagesChapter 2Jihan KwonNo ratings yet
- Modeling of The Musculoskeletal Systems (Supplementary 1)Document6 pagesModeling of The Musculoskeletal Systems (Supplementary 1)Shyam PolacondaNo ratings yet
- Vectors Tensors Cartesian VectorsDocument7 pagesVectors Tensors Cartesian VectorsfransbeNo ratings yet
- Determinants: 1 The Determinant of A 2 × 2 MatrixDocument17 pagesDeterminants: 1 The Determinant of A 2 × 2 MatrixJuan Ignacio RamirezNo ratings yet
- Linear Dependence and SpamDocument5 pagesLinear Dependence and SpamcrisandyNo ratings yet
- Practice Questions Vec Norm CorrDocument1 pagePractice Questions Vec Norm CorrirfanNo ratings yet
- Chapter 3Document154 pagesChapter 3Lucas WeeNo ratings yet
- Tarea 1 - CDVVDocument6 pagesTarea 1 - CDVVAristoteles Flores BravoNo ratings yet
- Lecture2 (Vectors and Tensors)Document18 pagesLecture2 (Vectors and Tensors)entesar kareemNo ratings yet
- Tutorial 2Document3 pagesTutorial 2Sahil YardiNo ratings yet
- 3.1 Definition and Examples of A Vector SpaceDocument21 pages3.1 Definition and Examples of A Vector SpacewilhelmstudyNo ratings yet
- Applied Mathematics I (Lecture - Notes)Document318 pagesApplied Mathematics I (Lecture - Notes)Hadera GebremariamNo ratings yet
- Practice Questions VectorandnormsDocument1 pagePractice Questions VectorandnormsirfanNo ratings yet
- Combine PDFDocument117 pagesCombine PDFAlexander MonroeNo ratings yet
- LAG ProblemSheet3Document2 pagesLAG ProblemSheet3Dominic Wynes-DevlinNo ratings yet
- Chapter 3Document155 pagesChapter 3andyNo ratings yet
- Lecture 2Document5 pagesLecture 2RishitaNo ratings yet
- Linear Combination: 3.4 Linear Dependence and Span P. DanzigerDocument14 pagesLinear Combination: 3.4 Linear Dependence and Span P. DanzigerzjnsrbtNo ratings yet
- Topic 1.1: Vector: 1. Introduction To Vectors Geometric VectorsDocument13 pagesTopic 1.1: Vector: 1. Introduction To Vectors Geometric VectorsJeevan KrishnanNo ratings yet
- Linear Algebra Exercise Sheet 7Document5 pagesLinear Algebra Exercise Sheet 7alexis marasiganNo ratings yet
- Math 215 Fall 2011 Homework 9Document1 pageMath 215 Fall 2011 Homework 9Mark John Servado AgsalogNo ratings yet
- Vector Spaces PDFDocument22 pagesVector Spaces PDFSyed AkramNo ratings yet
- The Solution of Transformation ParametersDocument8 pagesThe Solution of Transformation Parametersulastuna2001No ratings yet
- L2 Vector AlgebraDocument28 pagesL2 Vector AlgebraRyan Jhay YangNo ratings yet
- Apuntes de Algebra MultilinearDocument100 pagesApuntes de Algebra MultilinearHeraclio ßernalNo ratings yet
- @vector PropertiesDocument10 pages@vector PropertiesAbhishekNo ratings yet
- Basic Matrix Operations and Geometric InterpretationsDocument8 pagesBasic Matrix Operations and Geometric Interpretationsaysun.ragipiNo ratings yet
- Chapter14 PDFDocument6 pagesChapter14 PDFHina DollyNo ratings yet
- First Year: Vectors, Dot and Cross ProductDocument6 pagesFirst Year: Vectors, Dot and Cross Productbaxreyn yareNo ratings yet
- Homework 0Document6 pagesHomework 0jerryNo ratings yet
- Darve Cme100 NotesDocument131 pagesDarve Cme100 Notesأحمد علي الفاخريNo ratings yet
- Diff GeometryDocument78 pagesDiff GeometrysidkodlekereNo ratings yet
- IC114 Tutorial 3Document2 pagesIC114 Tutorial 3Yadnyit PanchbhaiNo ratings yet
- Span BASISDocument45 pagesSpan BASISHarsh VermaNo ratings yet
- Vector SpacesDocument10 pagesVector SpacesAbsensi RidwanNo ratings yet
- Homework 1Document5 pagesHomework 1Stacy TashNo ratings yet
- 1192-PDF File-1271-1-10-20120117Document8 pages1192-PDF File-1271-1-10-20120117bwzfacgbdjapqbpuywNo ratings yet
- Unit I Ax B and The Four Subspaces PDFDocument57 pagesUnit I Ax B and The Four Subspaces PDFAhmed Al SayedNo ratings yet
- Fall2013math290lecture17 PDFDocument28 pagesFall2013math290lecture17 PDFGetachew TadesseNo ratings yet
- Continuum Mechanics - TensorsDocument12 pagesContinuum Mechanics - TensorsBrian WoodNo ratings yet
- General Vector Spaces (CTD) : Linear Independence (Section 4.4 Continued)Document8 pagesGeneral Vector Spaces (CTD) : Linear Independence (Section 4.4 Continued)asahNo ratings yet
- WS 1Document1 pageWS 1Beth RankinNo ratings yet
- Basics of Affine GeometryDocument52 pagesBasics of Affine GeometrySeidKršićNo ratings yet
- Basics of Affine GeometryDocument56 pagesBasics of Affine GeometryThanh Ha NguyenNo ratings yet
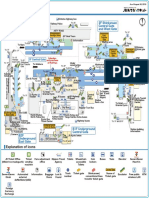
- Station Exit: Mitsukoshimae Station (Z9/ G12) : 0.3 KM Shin-Nihombashi Station: (JO20) : 0.40 KMDocument5 pagesStation Exit: Mitsukoshimae Station (Z9/ G12) : 0.3 KM Shin-Nihombashi Station: (JO20) : 0.40 KMSuhas NatuNo ratings yet
- ICA - Visa Free Transit FacilityDocument2 pagesICA - Visa Free Transit FacilitySuhas NatuNo ratings yet
- KyotoDocument15 pagesKyotoSuhas NatuNo ratings yet
- Russian Numbers - Russian Language Lesson 2 PDFDocument1 pageRussian Numbers - Russian Language Lesson 2 PDFSuhas Natu100% (1)
- 2F Shinkansen Central Gate and West GateDocument2 pages2F Shinkansen Central Gate and West GateSuhas NatuNo ratings yet
- Matheran Review: Matheran Facts For First Time VisitorDocument2 pagesMatheran Review: Matheran Facts For First Time VisitorSuhas NatuNo ratings yet
- Matheran Travel Guide - WikitravelDocument5 pagesMatheran Travel Guide - WikitravelSuhas NatuNo ratings yet
- Trabajos de InglésDocument6 pagesTrabajos de Inglésliztmmm35No ratings yet
- FABM 1-Answer Sheet-Q1 - Summative TestDocument2 pagesFABM 1-Answer Sheet-Q1 - Summative TestFlorante De Leon100% (2)
- Federal Election Commission Complaint Filed Against Tennessee State Sen. Brian Kelsey, OthersDocument66 pagesFederal Election Commission Complaint Filed Against Tennessee State Sen. Brian Kelsey, OthersUSA TODAY NetworkNo ratings yet
- Age of Sigmar AoS - Battletome - Hedonites of Slaanesh - Errata 2023-01Document4 pagesAge of Sigmar AoS - Battletome - Hedonites of Slaanesh - Errata 2023-01Ughu RajaNo ratings yet
- Frost Academy All Boys SchoolDocument361 pagesFrost Academy All Boys Schoolcam UyangurenNo ratings yet
- Students Name - Kendrick Joel Fernandes ROLL NO. 8250 Semester Vi Subject - Turnaround Management Topic-Industrial SicknessDocument15 pagesStudents Name - Kendrick Joel Fernandes ROLL NO. 8250 Semester Vi Subject - Turnaround Management Topic-Industrial SicknesskarenNo ratings yet
- Kuis 4Document10 pagesKuis 4Deri AntoNo ratings yet
- Business Communication and Behavioural StudiesDocument10 pagesBusiness Communication and Behavioural StudiesBhujangam NaiduNo ratings yet
- The Convergent Parallel DesignDocument8 pagesThe Convergent Parallel Designghina88% (8)
- Car Radiator AssignmentDocument25 pagesCar Radiator AssignmentKamran ZafarNo ratings yet
- MacDonald, J.& MacDonald, L. (1974)Document17 pagesMacDonald, J.& MacDonald, L. (1974)Mariuca PopescuNo ratings yet
- Kumpulan Soal UPDocument16 pagesKumpulan Soal UPTriono SusantoNo ratings yet
- IEEE 802.1adDocument7 pagesIEEE 802.1adLe Viet HaNo ratings yet
- Rhavif's ResumeDocument1 pageRhavif's ResumeRhavif BudiboyNo ratings yet
- Registrable and Non-Registrable Adverse ClaimsDocument18 pagesRegistrable and Non-Registrable Adverse ClaimsJacob Castro100% (1)
- Eastwoods: College of Science and Technology, IncDocument2 pagesEastwoods: College of Science and Technology, IncMichael AustriaNo ratings yet
- ADVOCATE ACT - Smart Notes PDFDocument30 pagesADVOCATE ACT - Smart Notes PDFAnonymous n7rLIWi7100% (2)
- Ventures Onsite Market Awards 22062023 64935868dDocument163 pagesVentures Onsite Market Awards 22062023 64935868dhamzarababa21No ratings yet
- Mind Map PredictionsDocument3 pagesMind Map PredictionsIvonne HernándezNo ratings yet
- 12 Angry Men AnalysisDocument9 pages12 Angry Men AnalysisShubhpreet Singh100% (1)
- Enter Pre NaurDocument82 pagesEnter Pre NaurNeha singhalNo ratings yet
- 3D Picture: The Acts of The Apostles: A Miraculous EscapeDocument6 pages3D Picture: The Acts of The Apostles: A Miraculous EscapeMyWonderStudio100% (7)
- James Burt HistoryDocument9 pagesJames Burt HistoryJan GarbettNo ratings yet
- Practice 3Document7 pagesPractice 3NinhNo ratings yet
- 1416490317Document2 pages1416490317Anonymous sRkitXNo ratings yet
- Lpm2.1theoryDocument85 pagesLpm2.1theoryvetprabu34No ratings yet
- Fruit LeathersDocument4 pagesFruit LeathersAmmon FelixNo ratings yet
- Apollo Hospital Chennai: NO: 16, BSNL TELESHOPPE, Greams Road 044 2999 1606Document9 pagesApollo Hospital Chennai: NO: 16, BSNL TELESHOPPE, Greams Road 044 2999 1606Manas ChandaNo ratings yet
- Reply Speeches What Are They?Document2 pagesReply Speeches What Are They?Yan Hao Nam89% (9)
- Ps 202PET Manual enDocument7 pagesPs 202PET Manual enStiv KisNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (80)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)From EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No ratings yet
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- Classroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyFrom EverandClassroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyNo ratings yet
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)