You might also like
- A Survey of Clustering With Deep Learning From The Perspective of Network ArchitectureDocument14 pagesA Survey of Clustering With Deep Learning From The Perspective of Network ArchitecturezekiNo ratings yet
- Learning To Cluster Faces On An Affinity GraphDocument9 pagesLearning To Cluster Faces On An Affinity GraphSahilKumarNo ratings yet
- DeepSMOTE Fusing Deep Learning and SMOTE For Imbalanced DataDocument15 pagesDeepSMOTE Fusing Deep Learning and SMOTE For Imbalanced DatakeerthanaNo ratings yet
- Neurocomputing: Yi Ding, Xian FuDocument3 pagesNeurocomputing: Yi Ding, Xian FuSelly Anastassia Amellia KharisNo ratings yet
- Clustering With Deep Learning: Taxonomy and New MethodsDocument12 pagesClustering With Deep Learning: Taxonomy and New Methodsrather AarifNo ratings yet
- Applsci 12 09402 v2Document21 pagesApplsci 12 09402 v2Nghiem Quoc AnhNo ratings yet
- FS Embedded MethodsDocument12 pagesFS Embedded Methodskiran munagalaNo ratings yet
- Scalable Fuzzy Clustering With Anchor GraphDocument12 pagesScalable Fuzzy Clustering With Anchor Graphpakardizavand.naserNo ratings yet
- 1 s2.0 S0031320323005459 MainDocument12 pages1 s2.0 S0031320323005459 MainSuman DasNo ratings yet
- Jimaging 09 00046 v2Document26 pagesJimaging 09 00046 v2Rean AndoNo ratings yet
- Generalizability of Semantic Segmentation Techniques: Keshav Bhandari Texas State University, San Marcos, TXDocument6 pagesGeneralizability of Semantic Segmentation Techniques: Keshav Bhandari Texas State University, San Marcos, TXKeshav BhandariNo ratings yet
- 1710 11573 PDFDocument14 pages1710 11573 PDFAshish SharmaNo ratings yet
- Fast Self-Supervised Clustering With Anchor GraphDocument14 pagesFast Self-Supervised Clustering With Anchor Graphpakardizavand.naserNo ratings yet
- 05 (2020) Braso Taixe - Learning A Neural Solver For Multiple Object TrackingDocument11 pages05 (2020) Braso Taixe - Learning A Neural Solver For Multiple Object Trackingmat felNo ratings yet
- Python Machine Learning for Beginners: Unsupervised Learning, Clustering, and Dimensionality Reduction. Part 1From EverandPython Machine Learning for Beginners: Unsupervised Learning, Clustering, and Dimensionality Reduction. Part 1No ratings yet
- Gautam A. KudaleDocument6 pagesGautam A. KudaleHellbuster45No ratings yet
- Deep Network With Support Vector Machines: Abstract. Deep Learning Methods Aims at Learning Features Automatically atDocument2 pagesDeep Network With Support Vector Machines: Abstract. Deep Learning Methods Aims at Learning Features Automatically atAsil AsilaNo ratings yet
- Multi Distance Metric Network For Few Shot Learning: Farong Gao Lijie Cai Zhangyi Yang Shiji Song Cheng WuDocument12 pagesMulti Distance Metric Network For Few Shot Learning: Farong Gao Lijie Cai Zhangyi Yang Shiji Song Cheng WuJavier RojasNo ratings yet
- Deep Learning For Network Analysis: Problems, Approaches and ChallengesDocument6 pagesDeep Learning For Network Analysis: Problems, Approaches and ChallengesrahmatNo ratings yet
- Survey of FNNDocument25 pagesSurvey of FNNsohel ranaNo ratings yet
- Paper Dinesh Clustering TechniquesDocument5 pagesPaper Dinesh Clustering TechniquesdineshNo ratings yet
- Deep Neural Network Regularization For Feature Selection in Learning-to-RankDocument19 pagesDeep Neural Network Regularization For Feature Selection in Learning-to-RankTran QuyNo ratings yet
- Recursive Hierarchical Clustering AlgorithmDocument7 pagesRecursive Hierarchical Clustering Algorithmreader29No ratings yet
- Recent Advances in Clustering A Brief SurveyDocument9 pagesRecent Advances in Clustering A Brief SurveyAnwar ShahNo ratings yet
- A New Method For Dimensionality Reduction Using K-Means Clustering Algorithm For High Dimensional Data SetDocument6 pagesA New Method For Dimensionality Reduction Using K-Means Clustering Algorithm For High Dimensional Data SetM MediaNo ratings yet
- Unsupervised Pre-Training of Image Features On Non-Curated DataDocument10 pagesUnsupervised Pre-Training of Image Features On Non-Curated DataHasham AdeebNo ratings yet
- Novos ClassificadoresDocument38 pagesNovos ClassificadoresHenrique Scheidt KleinNo ratings yet
- A Survey On Image Data Augmentation For Deep LearnDocument49 pagesA Survey On Image Data Augmentation For Deep LearnGabriele CastaldiNo ratings yet
- Paper Web ClusteringDocument3 pagesPaper Web ClusteringshitalNo ratings yet
- Online Nonnegative Matrix Factorization With OutliersDocument28 pagesOnline Nonnegative Matrix Factorization With Outliers余深宝No ratings yet
- Maruti Seminar ReportDocument29 pagesMaruti Seminar Reportsauravd7774No ratings yet
- V3i206 PDFDocument5 pagesV3i206 PDFIJCERT PUBLICATIONSNo ratings yet
- TKDE Waseem PDFDocument16 pagesTKDE Waseem PDFWaseem ShahzadNo ratings yet
- Swarm IntelligenceDocument16 pagesSwarm Intelligencewehiye438No ratings yet
- Do We Really Need Deep Learning Models For Tiem Series Forecasting 2101.02118Document16 pagesDo We Really Need Deep Learning Models For Tiem Series Forecasting 2101.02118heavywaterNo ratings yet
- Ali and Abdullah, 2020 (Big Data, SVM, SparkDocument14 pagesAli and Abdullah, 2020 (Big Data, SVM, Sparkalaketu muyideenNo ratings yet
- Semantic Labeling TVCGDocument14 pagesSemantic Labeling TVCGK. Shankar Naik RathodNo ratings yet
- Active Learning For Entity AlignmentDocument15 pagesActive Learning For Entity Alignmentwalter huNo ratings yet
- Iterative Improved K-Means ClusterinDocument5 pagesIterative Improved K-Means Clusterinmadhuridalal1012No ratings yet
- Domain Generalization On ConstrainedDocument12 pagesDomain Generalization On ConstrainedRandaNo ratings yet
- Dijazi - Deep Clustering Via Joint Convolutional Autoencoder Embedding and Relative Entropy Minimization - 17Document13 pagesDijazi - Deep Clustering Via Joint Convolutional Autoencoder Embedding and Relative Entropy Minimization - 17masoud kiaNo ratings yet
- Capstone Design Project Weekly Progress Report: Dynamic Autoselection of Machine Learning Model in Networks of CloudDocument6 pagesCapstone Design Project Weekly Progress Report: Dynamic Autoselection of Machine Learning Model in Networks of Cloudsudhakar kethanaNo ratings yet
- Deep Clustering For Unsupervised Learning of Visual Features (Caron 2018) PDFDocument30 pagesDeep Clustering For Unsupervised Learning of Visual Features (Caron 2018) PDFcarlosgg33No ratings yet
- (高斯分布 拉普拉斯分布)Document16 pages(高斯分布 拉普拉斯分布)Jiaqi TangNo ratings yet
- Soft Clustering For Very Large Data Sets: State University of New York, New Paltz, NY, USADocument15 pagesSoft Clustering For Very Large Data Sets: State University of New York, New Paltz, NY, USAKaren SanchezNo ratings yet
- 04 Vision WangDocument6 pages04 Vision WanghectorjazzNo ratings yet
- Nguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperDocument10 pagesNguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperVictor LöfgrenNo ratings yet
- Deep ClustersDocument30 pagesDeep ClustersMohsen AnsariNo ratings yet
- 02 Ieee Kadhim2014Document6 pages02 Ieee Kadhim2014Mukhammad Mahmun AminudinNo ratings yet
- SAPENet: Self-Attention Based Prototype Enhancement Network For Few-Shot LearningDocument11 pagesSAPENet: Self-Attention Based Prototype Enhancement Network For Few-Shot Learningnatra2k2No ratings yet
- Pam Clustering Technique: Bachelor of Technology Computer Science and EngineeringDocument11 pagesPam Clustering Technique: Bachelor of Technology Computer Science and EngineeringsamakshNo ratings yet
- Data Science Project Training ReportDocument19 pagesData Science Project Training ReportSunny SharanNo ratings yet
- Experiential Study of Kernel Functions To Design An Optimized Multi-Class SVMDocument6 pagesExperiential Study of Kernel Functions To Design An Optimized Multi-Class SVMAnonymous lPvvgiQjRNo ratings yet
- Survey On Feature Selection in High-Dimensional Data Via Constraint, Relevance and RedundancyDocument4 pagesSurvey On Feature Selection in High-Dimensional Data Via Constraint, Relevance and RedundancyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Benchmark Graph Neural NetworkDocument30 pagesBenchmark Graph Neural NetworkAnh Vuong TuanNo ratings yet
- Clustering Techniques in Data MiningDocument7 pagesClustering Techniques in Data MiningDhekk'iiaah Baruu BangunntNo ratings yet
- Multi-Label Classification With Weighted Labels Using Learning Classifier SystemsDocument7 pagesMulti-Label Classification With Weighted Labels Using Learning Classifier Systemsnadya safitriNo ratings yet
- Online Entropy-Based Discretization For Data Streaming ClassificationDocument12 pagesOnline Entropy-Based Discretization For Data Streaming ClassificationHungNo ratings yet
- Deep Embedding Network For ClusteringDocument6 pagesDeep Embedding Network For Clusteringdonaldo garciaNo ratings yet
- A Review of Supervised Learning Based Classification For Text To Speech SystemDocument8 pagesA Review of Supervised Learning Based Classification For Text To Speech SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1602.06561v2 - Deep Learning in Finance - 2016 PDFDocument20 pages1602.06561v2 - Deep Learning in Finance - 2016 PDFajgallegoNo ratings yet
- Stochastic Variational Deep Kernel LearningDocument13 pagesStochastic Variational Deep Kernel LearningpogNo ratings yet
- Deep Successor Reinforcement Learning: Authors Contributed Equally and Listed AlphabeticallyDocument10 pagesDeep Successor Reinforcement Learning: Authors Contributed Equally and Listed AlphabeticallypogNo ratings yet
- Collaborative Deep Reinforcement LearningDocument9 pagesCollaborative Deep Reinforcement LearningpogNo ratings yet
- DDQN PDFDocument13 pagesDDQN PDFBhanu PriyaNo ratings yet
- Deep Kernel Learning: Mackay 1998Document19 pagesDeep Kernel Learning: Mackay 1998Jane DaneNo ratings yet
- A Study of Deep Learning ApplicationsDocument3 pagesA Study of Deep Learning ApplicationsEditor IJTSRDNo ratings yet
- L D S M: Earning EEP Tructured OdelsDocument11 pagesL D S M: Earning EEP Tructured OdelspogNo ratings yet
- Distributed Deep Q-Learning: Hao Yi Ong, Kevin Chavez, and Augustus HongDocument8 pagesDistributed Deep Q-Learning: Hao Yi Ong, Kevin Chavez, and Augustus HongpogNo ratings yet
- 1107 0037Document38 pages1107 0037pogNo ratings yet
- Quantum Deep LearningDocument34 pagesQuantum Deep LearningpogNo ratings yet
- Matveev Mechanics and Theory of RelativityDocument419 pagesMatveev Mechanics and Theory of Relativityegmont7100% (1)
- Deep Learning in MedicineDocument6 pagesDeep Learning in MedicineEditor IJTSRDNo ratings yet
- Image Classification Using Deep LearningDocument3 pagesImage Classification Using Deep LearningEditor IJTSRDNo ratings yet
- Deep Learning in MedicineDocument6 pagesDeep Learning in MedicineEditor IJTSRDNo ratings yet
- Blender Cheatsheet v1Document7 pagesBlender Cheatsheet v1frankjoss100% (1)
- 43 Deep Learning Based Pain TreatmentDocument19 pages43 Deep Learning Based Pain TreatmentpogNo ratings yet
- Adaptive Flight Control With Living Neuronal Networks On Microelectrode Trays - de Marse, Dockendorf PDFDocument4 pagesAdaptive Flight Control With Living Neuronal Networks On Microelectrode Trays - de Marse, Dockendorf PDFSubham SinghNo ratings yet
- Operation Guide 5245: Things To Check Before Using The Watch About This ManualDocument6 pagesOperation Guide 5245: Things To Check Before Using The Watch About This ManualSulhan SinarliNo ratings yet
- D&D 5e - Xanathar's Guide To EverythingDocument196 pagesD&D 5e - Xanathar's Guide To EverythingLoba96% (305)
- 43 Deep Learning Based Pain TreatmentDocument19 pages43 Deep Learning Based Pain TreatmentpogNo ratings yet
- A Study of Deep Learning ApplicationsDocument3 pagesA Study of Deep Learning ApplicationsEditor IJTSRDNo ratings yet
- Tricks From Deep LearningDocument4 pagesTricks From Deep LearningpogNo ratings yet
- Image Classification Using Deep LearningDocument3 pagesImage Classification Using Deep LearningEditor IJTSRDNo ratings yet
- Upay Department: Frequently Asked Questions (Faqs) - CustomersDocument13 pagesUpay Department: Frequently Asked Questions (Faqs) - CustomerstanvirNo ratings yet
- Let Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre DeploymentDocument3 pagesLet Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre Deploymentrianeprogod3600No ratings yet
- Lab 5: Creating Secure Architectures: A ChallengeDocument14 pagesLab 5: Creating Secure Architectures: A ChallengeLêDương AnhTuấnNo ratings yet
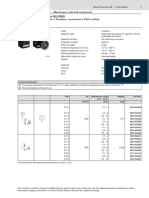
- Pressure Regulator, Series NL2-RGSDocument3 pagesPressure Regulator, Series NL2-RGSHuynh Duc TriNo ratings yet
- Gen Math Rational FunctionsDocument20 pagesGen Math Rational FunctionsMGrace P. VergaraNo ratings yet
- 03-01-01 - SALSA - TRAIN - IW34 - PM Order For NotificationDocument12 pages03-01-01 - SALSA - TRAIN - IW34 - PM Order For NotificationMiguel MenesesNo ratings yet
- Digital Marketing and CommunicationDocument9 pagesDigital Marketing and CommunicationKezaiahNo ratings yet
- Pe1024-Mb-Mfb030-011200 38 GT#1 MBX PDFDocument1 pagePe1024-Mb-Mfb030-011200 38 GT#1 MBX PDFAldo Quispe HuarachiNo ratings yet
- AFO Mains CoursesDocument18 pagesAFO Mains CoursesVishnuNo ratings yet
- Grade 10 Math Q2 FULL Week 1 - WatermarkDocument28 pagesGrade 10 Math Q2 FULL Week 1 - WatermarkSophia Junelle100% (1)
- Array DSDocument10 pagesArray DSsriNo ratings yet
- Real Life Startup Pitch DeckDocument55 pagesReal Life Startup Pitch DeckWalter TenecotaNo ratings yet
- Remote Control For Sulzer Rta EnginesDocument2 pagesRemote Control For Sulzer Rta EnginesRusuVasileCristianNo ratings yet
- Maxtest SoftwareDocument47 pagesMaxtest SoftwareGMAR Comercializadora100% (1)
- Indian Telecom SectorDocument40 pagesIndian Telecom Sectoragrawalrohit_228384No ratings yet
- Wfa - Metric - Tube FittingsDocument75 pagesWfa - Metric - Tube FittingsandywanderNo ratings yet
- DT Coursework ExampleDocument8 pagesDT Coursework Examplefzdpofajd100% (2)
- Germany - TR6 - Rev 9 - Belegexemplar - ENDocument52 pagesGermany - TR6 - Rev 9 - Belegexemplar - ENHéctor LodosoNo ratings yet
- TEMPCORE® Process To Produce Low-Cost High Strength RebarsDocument7 pagesTEMPCORE® Process To Produce Low-Cost High Strength Rebarsamber sareenNo ratings yet
- 09 SlideDocument61 pages09 SlideAbeer MahmoudNo ratings yet
- A Study On Rainfall Prediction Techniques: December 2021Document16 pagesA Study On Rainfall Prediction Techniques: December 2021Suraj JadhavNo ratings yet
- CDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.Document1 pageCDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.ThierryNo ratings yet
- Lecture Notes - Week 2Document13 pagesLecture Notes - Week 2Nathaniel LucasNo ratings yet
- Introduction To Linear Algebra 6th Edition and A CR - 05Document14 pagesIntroduction To Linear Algebra 6th Edition and A CR - 05maviarena44% (9)
- 19me411 QR With AnsDocument43 pages19me411 QR With AnsAravind KumarNo ratings yet
- Bard - Site Rite - Ultrasound-EnDocument42 pagesBard - Site Rite - Ultrasound-EnVicNo ratings yet
- IoT Fundamentals 2.0 Lansing CC - June 6Document38 pagesIoT Fundamentals 2.0 Lansing CC - June 6Cristianovsky CvNo ratings yet
- GreenBiz Baseline Survey 2023Document6 pagesGreenBiz Baseline Survey 2023Maina KanyottuNo ratings yet
- Mic850 E Rev2Document172 pagesMic850 E Rev2donitoticoNo ratings yet
- Netec Video Player Quick Start Guide 5.10Document10 pagesNetec Video Player Quick Start Guide 5.10ubik59No ratings yet