You might also like
- Relating Cultural Identity and Identity As Art TherapisDocument6 pagesRelating Cultural Identity and Identity As Art TherapisAnonymous oAGumZoNo ratings yet
- Lecture 14Document73 pagesLecture 14Sourabh Sisodia SrßNo ratings yet
- Hough Transform: Presentation by Sumit TandonDocument27 pagesHough Transform: Presentation by Sumit TandonpsnvaratharajanNo ratings yet
- Hough TransformDocument19 pagesHough TransformSmitha VasNo ratings yet
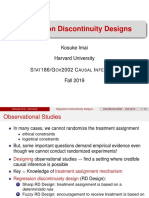
- EECE 5639 Computer Vision I: Hough Transform, Model Fitting, Planar Unwarping Hw3 Has Been PostedDocument62 pagesEECE 5639 Computer Vision I: Hough Transform, Model Fitting, Planar Unwarping Hw3 Has Been PostedSourabh Sisodia SrßNo ratings yet
- Hough TransformDocument20 pagesHough Transformr10aldinhoNo ratings yet
- Stockman MeasureDocument32 pagesStockman MeasureHammad HassanNo ratings yet
- 5 Hough TransformDocument27 pages5 Hough TransformsujithaNo ratings yet
- Hough TransformDocument16 pagesHough TransformFateeha Fatima TurkNo ratings yet
- CH 16 Part II Ag2018Document27 pagesCH 16 Part II Ag2018HumbertoNo ratings yet
- 10 RDDocument16 pages10 RDGing lonmnNo ratings yet
- Beamteam3 Report FinalDocument11 pagesBeamteam3 Report Finalapi-385778309No ratings yet
- Quant Formula HandbookDocument29 pagesQuant Formula HandbookKarthikPillaiNo ratings yet
- ScaraDocument8 pagesScararwurdigNo ratings yet
- AdsconvexhullDocument32 pagesAdsconvexhullKrishan Pal SinghNo ratings yet
- Fiitjee All India Test Series: JEE (Advanced) - 2020Document23 pagesFiitjee All India Test Series: JEE (Advanced) - 2020Surendra KumarNo ratings yet
- CG Exp5 C28Document24 pagesCG Exp5 C28Prathmesh GaikwadNo ratings yet
- 12 Math Notes CHP 9Document13 pages12 Math Notes CHP 9Shah KavishNo ratings yet
- Printable Week 1 SlidesDocument16 pagesPrintable Week 1 SlidesSpencer gamingNo ratings yet
- 8 Chapter SummaryDocument3 pages8 Chapter SummaryJob PolvorizaNo ratings yet
- Mathematical Modeling of Electrical Machines Using Circle Diagram R S ShekhawatDocument10 pagesMathematical Modeling of Electrical Machines Using Circle Diagram R S ShekhawatPrakash SoniNo ratings yet
- CS341 Lec17 Annotated Apr02Document14 pagesCS341 Lec17 Annotated Apr02artemNo ratings yet
- FinalpresentationDocument21 pagesFinalpresentationapi-617547727No ratings yet
- Forward and Inverse Kinematics of A Delta Robot With CGA5Document13 pagesForward and Inverse Kinematics of A Delta Robot With CGA5Nguyen Tran Buu ThachNo ratings yet
- Some Properties of Finite Morphisms On Double PoinDocument23 pagesSome Properties of Finite Morphisms On Double PoinshahriyarpourakbarsaffarNo ratings yet
- Unit - 1 - EM - Theory - Lecture 5Document36 pagesUnit - 1 - EM - Theory - Lecture 5krishnakowsik24No ratings yet
- Lec 2 - Polar Co-OrdinatesDocument24 pagesLec 2 - Polar Co-Ordinatesojaswi pratap singhNo ratings yet
- It6502 DSP Iq April May 2017Document3 pagesIt6502 DSP Iq April May 2017Pratheev SNo ratings yet
- Berry PhaseDocument53 pagesBerry PhaseMarc HellstroemNo ratings yet
- Aodtangentnormal-Synopsis FinalDocument10 pagesAodtangentnormal-Synopsis FinalprekshithreddygattlaNo ratings yet
- Algebra and Trigonometry Part IDocument3 pagesAlgebra and Trigonometry Part ITushar KanojiyaNo ratings yet
- Mathematics Notes and Formula For Class 12 Chapter 8 App20IntegralsDocument14 pagesMathematics Notes and Formula For Class 12 Chapter 8 App20IntegralsOmelNo ratings yet
- Anderson Chapter 6Document22 pagesAnderson Chapter 6saintanddevilNo ratings yet
- A Search With Inconsistent HeuristicsDocument6 pagesA Search With Inconsistent HeuristicsIslam HaffiedNo ratings yet
- Mse Paper - QM Phys4003 - 2022Document3 pagesMse Paper - QM Phys4003 - 2022MANISH SINGHNo ratings yet
- Ch4-Seepage Through SoilsDocument29 pagesCh4-Seepage Through SoilsRafi Sulaiman100% (1)
- Ch10 - Curve FittingDocument157 pagesCh10 - Curve FittingshvdoNo ratings yet
- Autopipe Reference Information: Straight Pipe Forces and Moments: Local OptionDocument2 pagesAutopipe Reference Information: Straight Pipe Forces and Moments: Local Option聂lNo ratings yet
- Maths FormulaChapter8 Application of IntegralsDocument15 pagesMaths FormulaChapter8 Application of IntegralsShivani BhardwajNo ratings yet
- L8 HeuristicsDocument11 pagesL8 Heuristicsshini s gNo ratings yet
- 05 DraftDocument68 pages05 Draft歐怡君No ratings yet
- Improved General Solution For The Dynamic Modeling of Gough-Stewart Platform Based On Principle of Virtual WorkDocument27 pagesImproved General Solution For The Dynamic Modeling of Gough-Stewart Platform Based On Principle of Virtual WorkReal FanNo ratings yet
- Linear FunctionsDocument4 pagesLinear Functionscockbob71No ratings yet
- Trigonometric Graphs: Algebra 2Document35 pagesTrigonometric Graphs: Algebra 2kamal arabNo ratings yet
- 20 Multiscale Vessel EnhancementDocument13 pages20 Multiscale Vessel EnhancementM Rameez Ur RehmanNo ratings yet
- Line IntegralDocument69 pagesLine Integralduongquocanh08092003No ratings yet
- A New Approach To Find Roots of Nonlinear Equations by Hybrid Algorithm To Bisection and Newton-Raphson AlgorithmsDocument9 pagesA New Approach To Find Roots of Nonlinear Equations by Hybrid Algorithm To Bisection and Newton-Raphson AlgorithmsFish MenuNo ratings yet
- Which Search Strategy Is Also Called As Blind Search? A. Uninformed Search B. Exhaustive Search C. Simple Reflex Search D. Heuristic SearchDocument9 pagesWhich Search Strategy Is Also Called As Blind Search? A. Uninformed Search B. Exhaustive Search C. Simple Reflex Search D. Heuristic SearchAnush BhatiaNo ratings yet
- II. Solve The Following Problems WITH COMPLETE SOLUTION. DO NOT ROUND Off Your Answers. Strictly No CheatingDocument1 pageII. Solve The Following Problems WITH COMPLETE SOLUTION. DO NOT ROUND Off Your Answers. Strictly No CheatingGilagidkidNo ratings yet
- Fiitjee All India Test Series: JEE (Advanced) - 2019Document20 pagesFiitjee All India Test Series: JEE (Advanced) - 2019bhav100% (1)
- Real Flows: (Continued)Document17 pagesReal Flows: (Continued)Sattar Al-JabairNo ratings yet
- On The P-ValueDocument15 pagesOn The P-ValuealbgomezNo ratings yet
- Optik: Original Research ArticleDocument7 pagesOptik: Original Research ArticleImran FareedNo ratings yet
- FiltersDocument34 pagesFiltersPrashant ChaharNo ratings yet
- Modelling and Upscaling Unsaturated Flow Through Randomly Heterogeneous SoilsDocument10 pagesModelling and Upscaling Unsaturated Flow Through Randomly Heterogeneous Soilsveena_snvNo ratings yet
- Application of Galerkin's Procedure To Aquifer Analysis: Oh K (H HW) 0Document13 pagesApplication of Galerkin's Procedure To Aquifer Analysis: Oh K (H HW) 0Juan Manuel Martínez RiveraNo ratings yet
- Sum of A Sin X +B Cos XDocument2 pagesSum of A Sin X +B Cos XBabu ReddyNo ratings yet
- ISI JRF Quantitative EconomicsDocument11 pagesISI JRF Quantitative Economicsapi-26401608No ratings yet
- Hough Transform: Unveiling the Magic of Hough Transform in Computer VisionFrom EverandHough Transform: Unveiling the Magic of Hough Transform in Computer VisionNo ratings yet
- Analysis and Computation of Fixed Points: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin—Madison, May 7-8, 1979From EverandAnalysis and Computation of Fixed Points: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin—Madison, May 7-8, 1979Stephen M. RobinsonNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- DL4CV Week03 Part01Document57 pagesDL4CV Week03 Part01muhammad syaukaniNo ratings yet
- From Points To Images: Bag-of-Words and VLAD RepresentationsDocument42 pagesFrom Points To Images: Bag-of-Words and VLAD Representationsmuhammad syaukaniNo ratings yet
- Image Descriptor Matching: Vineeth N BalasubramanianDocument20 pagesImage Descriptor Matching: Vineeth N Balasubramanianmuhammad syaukaniNo ratings yet
- Vision: Suryo Adhi Wibowo, PH.DDocument51 pagesVision: Suryo Adhi Wibowo, PH.Dmuhammad syaukaniNo ratings yet
- Peony Patterns Myrtle Printable Skirt PiecesDocument30 pagesPeony Patterns Myrtle Printable Skirt PiecesVanessa PinedaNo ratings yet
- Ao 2008 0004Document2 pagesAo 2008 0004Glenn Carlo PanesNo ratings yet
- Radiologi Kedaruratan & Traumatologi-Prof. Dr. Bachtiar MDocument55 pagesRadiologi Kedaruratan & Traumatologi-Prof. Dr. Bachtiar MMonazzt AsshagabNo ratings yet
- 2019 Ndlambe Municipality Integrated Land Use SchemeDocument90 pages2019 Ndlambe Municipality Integrated Land Use SchemerichardkrigeNo ratings yet
- Greenhalgh L and Rosenblatt Z Job InsecurityDocument12 pagesGreenhalgh L and Rosenblatt Z Job InsecurityyunusanterNo ratings yet
- Colorful Brush Strokes Presentation TemplateDocument12 pagesColorful Brush Strokes Presentation TemplateEllen Mae M. CabadingNo ratings yet
- FOCGB1 Utest VG 7ADocument2 pagesFOCGB1 Utest VG 7Auattt07No ratings yet
- CobraNet CNTraining2Document95 pagesCobraNet CNTraining2Stephen RaymondNo ratings yet
- Product Information: Universal Gripper EGLDocument12 pagesProduct Information: Universal Gripper EGLoualid zouggarNo ratings yet
- Yang Yan, Bin Wang, Jun Zou - Blockchain - Empowering Digital Economy-World Scientific Publishing (2021)Document267 pagesYang Yan, Bin Wang, Jun Zou - Blockchain - Empowering Digital Economy-World Scientific Publishing (2021)Nicole HartNo ratings yet
- IOSD Mini User Manual v1.06 enDocument5 pagesIOSD Mini User Manual v1.06 enM D. M.No ratings yet
- Lipoprotein Tests: Cholesterol (140-199 MG/DL)Document3 pagesLipoprotein Tests: Cholesterol (140-199 MG/DL)imperiouxxNo ratings yet
- Marketing - Nature & ScopeDocument5 pagesMarketing - Nature & ScopeDIVINE INSTITUTE OF MANAGEMENT & STUDIESNo ratings yet
- This Study Resource Was: Significant ZerosDocument6 pagesThis Study Resource Was: Significant ZerosSmartunblurrNo ratings yet
- C1C DatasheetDocument6 pagesC1C DatasheetAnirudh DeoNo ratings yet
- Marine Engineering Reference To Marina Exam QuestionnairreDocument5,156 pagesMarine Engineering Reference To Marina Exam QuestionnairrePaul Gerald DelgadoNo ratings yet
- CCTV CameraDocument3 pagesCCTV CameraRuchit SankhesaraNo ratings yet
- General Requirements For Flares and Flare StacksDocument9 pagesGeneral Requirements For Flares and Flare StacksReza100% (1)
- Chen's Spiritual and Psychic Teachings by Andy Porter V3Document123 pagesChen's Spiritual and Psychic Teachings by Andy Porter V3Kristin MurphyNo ratings yet
- 2 Listening (Riddles)Document2 pages2 Listening (Riddles)Ahmad Shahrani MusaNo ratings yet
- Financial Accounting and Reporting - SLK - 02Document9 pagesFinancial Accounting and Reporting - SLK - 02Its Nico & SandyNo ratings yet
- IP Search ReportDocument47 pagesIP Search ReportAhmed Ali AreebNo ratings yet
- Transformer Life ManagementDocument20 pagesTransformer Life ManagementwiyatnoNo ratings yet
- Open GL Macos X Objective CDocument183 pagesOpen GL Macos X Objective Cराहुल कुमारNo ratings yet
- Fine Woodworking: Photos: Anissa KapsalesDocument8 pagesFine Woodworking: Photos: Anissa Kapsalesjpl.guedes6842No ratings yet
- Pas 1Document1 pagePas 1Elisha ENo ratings yet
- Exposé DNLDocument4 pagesExposé DNLBelletier GasparNo ratings yet
- You Must Be A Big GiverDocument1 pageYou Must Be A Big GiverEricBoamahNo ratings yet