You might also like
- CIS Control Technology-Theory-Spring-2021Document6 pagesCIS Control Technology-Theory-Spring-2021mishal shakeelNo ratings yet
- Epdu Et - 273 Lecture 1Document15 pagesEpdu Et - 273 Lecture 1mishal shakeelNo ratings yet
- Communication Technology: M. AhmedDocument30 pagesCommunication Technology: M. Ahmedmishal shakeelNo ratings yet
- I Today's TopicDocument17 pagesI Today's Topicmishal shakeelNo ratings yet
- Section 5 Block DiagramsDocument41 pagesSection 5 Block Diagramsmishal shakeelNo ratings yet
- 351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram ReductionDocument70 pages351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram Reductionmishal shakeelNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lab 9 GraphDocument9 pagesLab 9 GraphThanh NhànNo ratings yet
- TNTHHTDocument18 pagesTNTHHTNguyễn Hữu ThắngNo ratings yet
- Alg of Inf 1Document579 pagesAlg of Inf 1tamiratNo ratings yet
- Elementary Algebra Graphs and Authentic Applications 2nd Edition Lehmann Test BankDocument46 pagesElementary Algebra Graphs and Authentic Applications 2nd Edition Lehmann Test Bankhillyobsidian8hi42g100% (32)
- ML - LAB - 7 - Jupyter NotebookDocument7 pagesML - LAB - 7 - Jupyter Notebooksuman100% (1)
- Linear Algebra With ApplicationsDocument5 pagesLinear Algebra With ApplicationsOscar FernandezNo ratings yet
- Trees: Binary Search (BST), Insertion and Deletion in BST: Unit VDocument26 pagesTrees: Binary Search (BST), Insertion and Deletion in BST: Unit VDheresh SoniNo ratings yet
- Matlab Questions PDFDocument2 pagesMatlab Questions PDFMuhammad AbbasNo ratings yet
- GraphsDocument32 pagesGraphsPuneet MittalNo ratings yet
- 108 Module 1 QuizDocument8 pages108 Module 1 QuizVivien VilladelreyNo ratings yet
- ECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)Document8 pagesECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)Filmann SimpaoNo ratings yet
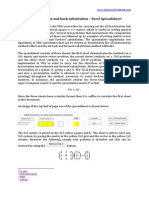
- LU Factorisation and Forward and Back Substitution - ExcelDocument4 pagesLU Factorisation and Forward and Back Substitution - ExcelrodwellheadNo ratings yet
- Detection of Brain Tumor From MRI Images by Using Segmentation &SVMDocument7 pagesDetection of Brain Tumor From MRI Images by Using Segmentation &SVMAashika GopalNo ratings yet
- Motion Estimation Algorithm Using Block-Matching and Harmony Search OptimizationDocument33 pagesMotion Estimation Algorithm Using Block-Matching and Harmony Search Optimizationking of boomNo ratings yet
- Decimation in Time and Frequency: Dr. C. Saritha Lecturer in Electronics SSBN Degree & PG College AnantapurDocument37 pagesDecimation in Time and Frequency: Dr. C. Saritha Lecturer in Electronics SSBN Degree & PG College Anantapurkibrom atsbhaNo ratings yet
- Lab 4 Discrete ConvolutionDocument12 pagesLab 4 Discrete Convolutionziafat shehzadNo ratings yet
- 3-4 - Polynomial Functions - Guided NotesDocument2 pages3-4 - Polynomial Functions - Guided Notesoceanolive2No ratings yet
- Ehlers. RSI SmoothingDocument7 pagesEhlers. RSI SmoothingalpepezNo ratings yet
- Signals and Systems Lab Manual Print PDFDocument27 pagesSignals and Systems Lab Manual Print PDFTejhas Kapoor100% (2)
- A First Course in Linear OptimizationDocument196 pagesA First Course in Linear OptimizationGaryNo ratings yet
- Discrete Hartley TransformDocument7 pagesDiscrete Hartley Transformbesty666No ratings yet
- USTH Algorithm AnalysisDocument78 pagesUSTH Algorithm Analysisnhng2421No ratings yet
- Ee364a Homework 2 SolutionsDocument4 pagesEe364a Homework 2 Solutionsnjxkgnwhf100% (1)
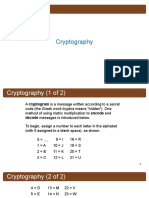
- CryptographyDocument10 pagesCryptographyKarylle AquinoNo ratings yet
- COL106: Data Structures and Algorithms: Ragesh Jaiswal, IIT DelhiDocument35 pagesCOL106: Data Structures and Algorithms: Ragesh Jaiswal, IIT DelhiAbhimanyu BalyanNo ratings yet
- Ci Seee2073 202220231Document5 pagesCi Seee2073 202220231lee shengquanNo ratings yet
- Constrained Cubic Spline Interpolation: For Chemical Engineering Applications by CJC KrugerDocument5 pagesConstrained Cubic Spline Interpolation: For Chemical Engineering Applications by CJC Krugerghorfrusty88No ratings yet
- DaaDocument3 pagesDaaArun KumarNo ratings yet
- Image Recognition Using Neural NetworksDocument18 pagesImage Recognition Using Neural NetworksAkásh SrívástávNo ratings yet
- Design and Analysis of Algorithms: Divide and Conquer MethodologyDocument17 pagesDesign and Analysis of Algorithms: Divide and Conquer Methodologyhyrax123No ratings yet