You might also like
- 2017 BD With Rician ChannelDocument6 pages2017 BD With Rician ChannelHadeer Hussein Ali AliNo ratings yet
- 2021_D. Lian_Federated Learning Over Cellular-Connected UAV Networks With Non-IID DatasetsDocument6 pages2021_D. Lian_Federated Learning Over Cellular-Connected UAV Networks With Non-IID DatasetsRUSLAN ZHAGYPARNo ratings yet
- Distributed Beamforming Techniques For Cell-Free Wireless Networks Using Deep Reinforcement LearningDocument16 pagesDistributed Beamforming Techniques For Cell-Free Wireless Networks Using Deep Reinforcement Learningwho3No ratings yet
- Joint Training and Resource Ation Optimization For Federated Learning in UAV SwarmDocument12 pagesJoint Training and Resource Ation Optimization For Federated Learning in UAV Swarmba beshaNo ratings yet
- Downlink MIMO HetNets - Dhillon Et All 2013Document13 pagesDownlink MIMO HetNets - Dhillon Et All 2013Coché HawkNo ratings yet
- BAZ20 - User-Centric 5G Cellular NetworksDocument15 pagesBAZ20 - User-Centric 5G Cellular Networksdharasingh949No ratings yet
- Digital Beamforming For Antenna ArraysDocument5 pagesDigital Beamforming For Antenna ArraysakashNo ratings yet
- Sensors 23 02772Document15 pagesSensors 23 02772hmalrizzoNo ratings yet
- Adaptive Perturbation-Aided Opportunistic Hybrid Beamforming For Mmwave SystemsDocument9 pagesAdaptive Perturbation-Aided Opportunistic Hybrid Beamforming For Mmwave SystemsRibhu ChopraNo ratings yet
- Limited Feedback Hybrid Precoding For Multi-User Millimeter Wave SystemsDocument14 pagesLimited Feedback Hybrid Precoding For Multi-User Millimeter Wave SystemsAhmet Sacit SümerNo ratings yet
- Hierarchical Federated Learning Across Heterogeneous Cellular NetworksDocument10 pagesHierarchical Federated Learning Across Heterogeneous Cellular NetworksOwais HakeemNo ratings yet
- Deep Multimodal Learning for Massive MIMO Channel PredictionDocument14 pagesDeep Multimodal Learning for Massive MIMO Channel PredictionDr Harjit Pal SinghNo ratings yet
- Spawc 2018 8446023Document5 pagesSpawc 2018 8446023bassamrehman11No ratings yet
- Access 2019 2899663Document11 pagesAccess 2019 2899663Chakri ChakradharNo ratings yet
- EBF-FD MIMO For 5G-A Tutorial PDFDocument35 pagesEBF-FD MIMO For 5G-A Tutorial PDFSayee KompalliNo ratings yet
- 2021 - A Survey On Reinforcement Learning-Aided Caching in Heterogeneous Mobile Edge NetworksDocument33 pages2021 - A Survey On Reinforcement Learning-Aided Caching in Heterogeneous Mobile Edge NetworksFarzad MehrabiNo ratings yet
- Cell-Free Massive MIMO A SurveyDocument32 pagesCell-Free Massive MIMO A Surveycansu ecemişNo ratings yet
- 2310.13830 -RiceDocument5 pages2310.13830 -Riceadeyimika.ipayeNo ratings yet
- Performance Analysis of NOMA in Training Based Multiuser MIMO SystemsDocument13 pagesPerformance Analysis of NOMA in Training Based Multiuser MIMO Systemshendra lamNo ratings yet
- Cell-Free Millimeter-Wave Massive MIMO Systems With Limited Fronthaul CapacityDocument16 pagesCell-Free Millimeter-Wave Massive MIMO Systems With Limited Fronthaul CapacitySofia Kara MostefaNo ratings yet
- Deep Learning For Signal Demodulation in PDFDocument10 pagesDeep Learning For Signal Demodulation in PDFrajaavikhram3719No ratings yet
- Accelerating Federated Learning with Cluster Construction and Hierarchical AggregationDocument18 pagesAccelerating Federated Learning with Cluster Construction and Hierarchical AggregationAmardip Kumar SinghNo ratings yet
- In-Network Angle Approximation For Supporting Adaptive BeamformingDocument6 pagesIn-Network Angle Approximation For Supporting Adaptive BeamformingPanagiotis FamelisNo ratings yet
- Deep-Learning Based Linear Precoding For MIMO Channels With Finite-Alphabet SignalingDocument4 pagesDeep-Learning Based Linear Precoding For MIMO Channels With Finite-Alphabet SignalingZorba ZorbaNo ratings yet
- User-Centric Communications Versus Cell-Free Massive MIMO For 5G Cellular NetworksDocument6 pagesUser-Centric Communications Versus Cell-Free Massive MIMO For 5G Cellular NetworksHAMEED ULLAHNo ratings yet
- Digital Twin Based Beam Prediction: Can We Train in The Digital World and Deploy in Reality?Document6 pagesDigital Twin Based Beam Prediction: Can We Train in The Digital World and Deploy in Reality?MOHNo ratings yet
- Sum-Rate Maximization and Leakage Minimization For Multi-User Cell-Free Massive MIMO SystemsDocument17 pagesSum-Rate Maximization and Leakage Minimization For Multi-User Cell-Free Massive MIMO SystemsAlfredo TiMendzNo ratings yet
- User Coordination For Fast Beam Training in FDD Multi-User Massive MIMODocument16 pagesUser Coordination For Fast Beam Training in FDD Multi-User Massive MIMObassamrehman11No ratings yet
- Learning How To Transfer From Uplink To Downlink Via Hyper-Recurrent Neural Network For FDD Massive MIMODocument15 pagesLearning How To Transfer From Uplink To Downlink Via Hyper-Recurrent Neural Network For FDD Massive MIMOelsieduNo ratings yet
- RIS-Assisted Multi-User MIMO Systems Exploiting Extreme Learning MachineDocument8 pagesRIS-Assisted Multi-User MIMO Systems Exploiting Extreme Learning MachineSotiris GoudosNo ratings yet
- 2022 - Survey On Positioning Information Assisted MmWave Beamforming TrainingDocument18 pages2022 - Survey On Positioning Information Assisted MmWave Beamforming Trainingveteg67000No ratings yet
- Coordinated Multi-Point Clustering Schemes A SurveyDocument22 pagesCoordinated Multi-Point Clustering Schemes A SurveySourabh BNo ratings yet
- Deep Learning Model for Mobile Network Throughput Root Cause AnalysisDocument6 pagesDeep Learning Model for Mobile Network Throughput Root Cause AnalysisRedamichael JemberuNo ratings yet
- Secure Index and Data Symbol Modulation For Ofdm-Im: Yonggu Lee, Hanseong Jo, Youngwook Ko, and Jinho ChoiDocument15 pagesSecure Index and Data Symbol Modulation For Ofdm-Im: Yonggu Lee, Hanseong Jo, Youngwook Ko, and Jinho ChoiEagle MadridestaNo ratings yet
- Massive MU-MIMO Downlink TDD Systems With Linear Precoding and Downlink PilotsDocument6 pagesMassive MU-MIMO Downlink TDD Systems With Linear Precoding and Downlink PilotssowNo ratings yet
- Dynamic Sidelobe Multiplexing in Beamspace MIMO SystemsDocument4 pagesDynamic Sidelobe Multiplexing in Beamspace MIMO SystemsPalungan KecilNo ratings yet
- Collaborative Mobile Edge Computing in 5G Networks: New Paradigms, Scenarios, and ChallengesDocument7 pagesCollaborative Mobile Edge Computing in 5G Networks: New Paradigms, Scenarios, and Challengesمحمد توفيقNo ratings yet
- 10 1109@jsac 2019 2929404Document15 pages10 1109@jsac 2019 2929404Sofia BouchenakNo ratings yet
- Energy Efficient Federated Learning Over WirelessDocument14 pagesEnergy Efficient Federated Learning Over WirelessQuỳnh SeanNo ratings yet
- Federated Learning For RAN Slicing in Beyond 5G NeDocument10 pagesFederated Learning For RAN Slicing in Beyond 5G NemoustaphaNo ratings yet
- Meng 2018Document14 pagesMeng 2018Sofia BouchenakNo ratings yet
- Provisioning of 5G Services Employing MachineDocument6 pagesProvisioning of 5G Services Employing MachinepathmakerpkNo ratings yet
- Selective DF Protocol For MIMO STBC BasedDocument17 pagesSelective DF Protocol For MIMO STBC BasedMehmet KibarNo ratings yet
- Particle Swarm Optimization-Long Shortterm Memory Based Channel Estimation With Hybrid Beam Forming Power Transfer in Wsn-Iot ApplicationsDocument15 pagesParticle Swarm Optimization-Long Shortterm Memory Based Channel Estimation With Hybrid Beam Forming Power Transfer in Wsn-Iot ApplicationsAIRCC - IJCNCNo ratings yet
- I Jcs It 2016070167Document4 pagesI Jcs It 2016070167Anup PandeyNo ratings yet
- Joint CSIT Acquisition Based On Low-Rank Matrix Completion For FDD Massive MIMO SystemsDocument4 pagesJoint CSIT Acquisition Based On Low-Rank Matrix Completion For FDD Massive MIMO Systemshendra lamNo ratings yet
- Design of UWB Antenna Based On Improved Deep Belief Network and Extreme Learning Machine Surrogate ModelsDocument9 pagesDesign of UWB Antenna Based On Improved Deep Belief Network and Extreme Learning Machine Surrogate ModelsPonduri SivaprasadNo ratings yet
- A Review On Cell-Free Massive MIMO SystemsDocument18 pagesA Review On Cell-Free Massive MIMO SystemsTea BegolliNo ratings yet
- Bidirectional Optical Spatial Modulation For Mobile Users: Towards A Practical Design For Lifi SystemsDocument30 pagesBidirectional Optical Spatial Modulation For Mobile Users: Towards A Practical Design For Lifi SystemsMilica PopadicNo ratings yet
- Deep Learning Channel EstimationDocument5 pagesDeep Learning Channel EstimationTim MazumdarNo ratings yet
- Centralized and Distributed Power Allocation For Max-Min Fairness in Cell-Free Massive MIMODocument5 pagesCentralized and Distributed Power Allocation For Max-Min Fairness in Cell-Free Massive MIMOcansu ecemişNo ratings yet
- Hybrid Precoding For Multi-User Millimeter Wave Massive MIMO Systems: A Deep Learning ApproachDocument11 pagesHybrid Precoding For Multi-User Millimeter Wave Massive MIMO Systems: A Deep Learning ApproachZorba ZorbaNo ratings yet
- Edge Computing-Enabled Cell-Free Massive MIMO SystemsDocument16 pagesEdge Computing-Enabled Cell-Free Massive MIMO SystemsSurya Shekhar singh sssNo ratings yet
- Prototype Filter Design For FBMC in Massive MIMO Channels: NtroductionDocument6 pagesPrototype Filter Design For FBMC in Massive MIMO Channels: NtroductiondfhgNo ratings yet
- Beyond-5G Massive MIMO Co-Prime Arrays Using Deep LearningDocument11 pagesBeyond-5G Massive MIMO Co-Prime Arrays Using Deep LearningSura MohammedNo ratings yet
- Deep MIMIO Data SetDocument8 pagesDeep MIMIO Data SetNadisanka RupasingheNo ratings yet
- 2018 - Differential Subcarrier Index ModulationDocument16 pages2018 - Differential Subcarrier Index ModulationAsma Bouhlel YounesNo ratings yet
- Qian 2019Document6 pagesQian 2019obithiusNo ratings yet
- A Matching Based Coexistence Mechanism Between eMBB and uRLLC in 5G Wireless NetworksDocument8 pagesA Matching Based Coexistence Mechanism Between eMBB and uRLLC in 5G Wireless NetworksAhmad JaradatNo ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Sinhala: VerseDocument368 pagesSinhala: VerseInsaf Ismath100% (2)
- Firearm Safety Certificate: Stud Y G UideDocument50 pagesFirearm Safety Certificate: Stud Y G UideInsaf IsmathNo ratings yet
- h2020 Guide Appl Msca If 2018 20 - enDocument69 pagesh2020 Guide Appl Msca If 2018 20 - enInsaf IsmathNo ratings yet
- Asdasd: All EventsDocument4 pagesAsdasd: All EventsInsaf IsmathNo ratings yet
- t2 PDFDocument1 paget2 PDFInsaf IsmathNo ratings yet
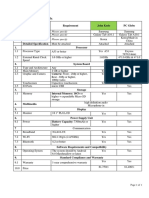
- Specification for Tablet PCDocument1 pageSpecification for Tablet PCInsaf IsmathNo ratings yet
- Wireless Past PapersDocument4 pagesWireless Past PapersInsaf IsmathNo ratings yet
- Neovarsity BrochureDocument24 pagesNeovarsity BrochureSriparna ChowdhuryNo ratings yet
- Financial Modelling - 3Document13 pagesFinancial Modelling - 3Hemo BoghosianNo ratings yet
- Moxa Mgate 5103 Series Tech Note v1.0Document27 pagesMoxa Mgate 5103 Series Tech Note v1.0Bejo SudobolNo ratings yet
- Val Dcf+ManualDocument675 pagesVal Dcf+ManualLarry GoodNo ratings yet
- Remotely Control The IC-R8600 Through An IP Network: Main FeaturesDocument2 pagesRemotely Control The IC-R8600 Through An IP Network: Main FeaturesanhxcoNo ratings yet
- HDD Bad Sector Recovery SOPDocument6 pagesHDD Bad Sector Recovery SOPTan Sen WieNo ratings yet
- Sports Registration TrendsDocument5 pagesSports Registration TrendsAnnaNo ratings yet
- Moodle LMS: An Open Source Learning PlatformDocument11 pagesMoodle LMS: An Open Source Learning PlatformschtiksNo ratings yet
- Microsoft Biztalk Server BasicsDocument40 pagesMicrosoft Biztalk Server Basicsk.sandeepjen100% (1)
- Applications 3Document16 pagesApplications 3Abu AliNo ratings yet
- SOP-04-Proses Penanganan Malicious CodeDocument2 pagesSOP-04-Proses Penanganan Malicious CodeNoval Saputra AjjahNo ratings yet
- Uganda Christian University Implements Online Graduation Clearance SystemDocument39 pagesUganda Christian University Implements Online Graduation Clearance Systemwaniaye derickNo ratings yet
- What Are The Steps To Create DblinkDocument3 pagesWhat Are The Steps To Create DblinkSHAHID FAROOQNo ratings yet
- Locale Literature and Studies on Hotel Inventory SystemsDocument2 pagesLocale Literature and Studies on Hotel Inventory SystemsKim Russel A. CruzadaNo ratings yet
- E-Tech HBA No. 1Document3 pagesE-Tech HBA No. 1Luke LopezNo ratings yet
- CompTIA Network+ Certification Practice Test 1 (Exam N10-006)Document10 pagesCompTIA Network+ Certification Practice Test 1 (Exam N10-006)LostbyondthevoidNo ratings yet
- Mini Case Study: Expenditure CycleDocument2 pagesMini Case Study: Expenditure CycleShenShen LynwellNo ratings yet
- XC9572XL Application NoteDocument3 pagesXC9572XL Application NoteSidharth ChaturvedyNo ratings yet
- Compiler Design Synopsis PresentationDocument11 pagesCompiler Design Synopsis Presentationvision_2050No ratings yet
- Python Quant Platform: Web-Based Financial Analytics and Rapid Financial Engineering With PythonDocument20 pagesPython Quant Platform: Web-Based Financial Analytics and Rapid Financial Engineering With Pythonkhprash100% (1)
- Rockschool PDF Drums Torrent PDFDocument5 pagesRockschool PDF Drums Torrent PDFစိန္ အုံး0% (1)
- Configure and Troubleshoot PTP in NexusDocument4 pagesConfigure and Troubleshoot PTP in Nexusabbyy36No ratings yet
- CSEC SocStud CoverSheetForESBA Fillable Dec2019Document1 pageCSEC SocStud CoverSheetForESBA Fillable Dec2019chrissaineNo ratings yet
- FDFFDDocument203 pagesFDFFDapi-234072634No ratings yet
- OSN 8800 V100R010C00 Product Overview 01Document57 pagesOSN 8800 V100R010C00 Product Overview 01Md Alamgir HossainNo ratings yet
- Creating a Hyperlink from WebI to an ECC TransactionDocument9 pagesCreating a Hyperlink from WebI to an ECC Transactionnatyp2021No ratings yet
- CODE Magazine - January-February 2020 PDFDocument78 pagesCODE Magazine - January-February 2020 PDFSAEL SOLARNo ratings yet
- Automatic Timetable Generator ReportDocument37 pagesAutomatic Timetable Generator ReportGAMING TAMIZHAN ARMYNo ratings yet
- Basic 8 Computer 1st Term E-NotesDocument30 pagesBasic 8 Computer 1st Term E-NotesAirhienbuwa Osahon91% (23)
- Part 3. Multiplexing PDH SDHDocument59 pagesPart 3. Multiplexing PDH SDHMahesh SinghNo ratings yet