You might also like
- Specs Cat 1404Document1 pageSpecs Cat 1404Dingus McGeeNo ratings yet
- Numerical Study On The Effect of Mooring Line Stiffness On Hydrodynamic Performance of Pontoon-Type Floating BreakwaterDocument6 pagesNumerical Study On The Effect of Mooring Line Stiffness On Hydrodynamic Performance of Pontoon-Type Floating Breakwatermostafa shahrabiNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- Keynote Speaker - Prof. S. Talukdar - Vehicle Induced Dynamic Response of A Bridge and Moving Load EstimationDocument6 pagesKeynote Speaker - Prof. S. Talukdar - Vehicle Induced Dynamic Response of A Bridge and Moving Load Estimationdigvijay singhNo ratings yet
- Determination of Optimum Gear Ratios of A Three STDocument9 pagesDetermination of Optimum Gear Ratios of A Three STzul isymaNo ratings yet
- Research of The Stress Condition of The Normal Section of Re - 2016 - Procedia EDocument7 pagesResearch of The Stress Condition of The Normal Section of Re - 2016 - Procedia Epraveen kbabuNo ratings yet
- Simulation and Model Verification of A Vehicle Handling DynamicsDocument6 pagesSimulation and Model Verification of A Vehicle Handling DynamicsGabriel de SáNo ratings yet
- 10.1007@978 981 13 6416 725Document11 pages10.1007@978 981 13 6416 725Ankit Dekhatawala SVNITNo ratings yet
- Computing Experiment For Unloading Dumper Truck at A Sloping PadDocument8 pagesComputing Experiment For Unloading Dumper Truck at A Sloping PadLong ThànhNo ratings yet
- Automatic Determination of PID Controlle PDFDocument20 pagesAutomatic Determination of PID Controlle PDFJosafa AstroNo ratings yet
- The Investigation of Stability of Wheeled Vehicle Model in Curved Sections of OverpassDocument8 pagesThe Investigation of Stability of Wheeled Vehicle Model in Curved Sections of OverpassGogyNo ratings yet
- 2022 Kybernetika UROVDocument17 pages2022 Kybernetika UROVRalph Gerard SangalangNo ratings yet
- Wang 2020Document10 pagesWang 2020JackNo ratings yet
- Transport Phenomena - Fluid Mechanics Problem:: Tangential Annular Flow Between Two Coaxial Rotating CylindersDocument4 pagesTransport Phenomena - Fluid Mechanics Problem:: Tangential Annular Flow Between Two Coaxial Rotating CylindersAmit RaiNo ratings yet
- Achieving Drag Reduction With Hullform ImprovementDocument11 pagesAchieving Drag Reduction With Hullform ImprovementSaidMounsifNo ratings yet
- Computation of Turbulent Jets in Annular Counter FlowDocument8 pagesComputation of Turbulent Jets in Annular Counter FlowKaffelNo ratings yet
- Comparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsDocument10 pagesComparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsengineeringyusufNo ratings yet
- Handle Bar Vibration MmotorcycleDocument12 pagesHandle Bar Vibration MmotorcycleabhijitNo ratings yet
- Analyses of Dynamic Response of Vehicle and Track Coupling System With Random Irregularity of Track Vertical ProfileDocument19 pagesAnalyses of Dynamic Response of Vehicle and Track Coupling System With Random Irregularity of Track Vertical ProfileHemanth C KNo ratings yet
- Coast Down Test - Theoretical and Experimental Approach: October 2010Document9 pagesCoast Down Test - Theoretical and Experimental Approach: October 2010giuliobomberNo ratings yet
- CFD Investigation Ofundergroud Car Park Ventilation With Different Ductless Jet Fan ConfigurationsDocument15 pagesCFD Investigation Ofundergroud Car Park Ventilation With Different Ductless Jet Fan ConfigurationsAnonymous P8Bt46mk5INo ratings yet
- A Numerical Study On Manoeuvrability of Wind Turbine Installation Vessel Using OpenfoamDocument12 pagesA Numerical Study On Manoeuvrability of Wind Turbine Installation Vessel Using OpenfoamJesus CortesNo ratings yet
- 1253-Article Text-2936-1-10-20230907Document12 pages1253-Article Text-2936-1-10-20230907ephremNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document7 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- Coordinated Control of Downshift Powertrain of ComDocument4 pagesCoordinated Control of Downshift Powertrain of Commuhammet fidanNo ratings yet
- Modeling and Simulation of Hydraulic Actuated Multibody Systems by Bond Graphs (Procedia Engineering, Vol. 69) (2014)Document7 pagesModeling and Simulation of Hydraulic Actuated Multibody Systems by Bond Graphs (Procedia Engineering, Vol. 69) (2014)Karim SalesNo ratings yet
- Turbo-Roundabouts Vs Roundabouts Performance LevelDocument11 pagesTurbo-Roundabouts Vs Roundabouts Performance LevelMuhammad Nura100% (1)
- Coupled Effects Between Solid Particles and Gas Velocities On Erosion of Elbows in Natural Gas PipelinesDocument11 pagesCoupled Effects Between Solid Particles and Gas Velocities On Erosion of Elbows in Natural Gas PipelinesDede Si Engghe SurenggheNo ratings yet
- Trajectory Optimization of The Exploration of Asteroids Using Swarm Intelligent AlgorithmsDocument5 pagesTrajectory Optimization of The Exploration of Asteroids Using Swarm Intelligent AlgorithmsArmanNo ratings yet
- Active Suspension SystemDocument10 pagesActive Suspension SystemSohan RaoNo ratings yet
- The Elliptical Trajectory With Modi Fied Sine Motion Pro File For Delta RobotDocument31 pagesThe Elliptical Trajectory With Modi Fied Sine Motion Pro File For Delta RobotDuy KhổngNo ratings yet
- Fong - 2021 - J. - Phys. - Conf. - Ser. - 1777 - 012063Document12 pagesFong - 2021 - J. - Phys. - Conf. - Ser. - 1777 - 012063FrancescoscNo ratings yet
- Friction Effect On Ball Positioning of An Automatic Balancer in Optical Disk DrivesDocument9 pagesFriction Effect On Ball Positioning of An Automatic Balancer in Optical Disk DrivessaurabhchandrakerNo ratings yet
- Hydrodynamic Performance Analysis of Propeller-Rudder System With The Rudder Parameters ChangingDocument7 pagesHydrodynamic Performance Analysis of Propeller-Rudder System With The Rudder Parameters ChangingBayu Pratama WidhiyasaNo ratings yet
- Two Dimensional Simulation of Flows in An Open ChannelDocument24 pagesTwo Dimensional Simulation of Flows in An Open Channeltri radinal saputraNo ratings yet
- Arora 2D ModelDocument15 pagesArora 2D Modelktjayakumar3878No ratings yet
- Zhang Et Al. - 2020 - Numerical Simulation of The Hydraulic Performances and Flow Pattern of Swallow-Tailed Flip BucketDocument14 pagesZhang Et Al. - 2020 - Numerical Simulation of The Hydraulic Performances and Flow Pattern of Swallow-Tailed Flip BucketIvan Buitrago LeonNo ratings yet
- A Multi-Objective Approach For Determining The Num PDFDocument18 pagesA Multi-Objective Approach For Determining The Num PDFbeNo ratings yet
- Investigation of Effect of Cambered Blades On Darrieus VawtsDocument7 pagesInvestigation of Effect of Cambered Blades On Darrieus VawtsPraveenkumar_UNo ratings yet
- Coupled Horizontal and Torsional Vibrations of Container ShipsDocument13 pagesCoupled Horizontal and Torsional Vibrations of Container ShipsJhonatan RosalesNo ratings yet
- Dynamic Response of Free-Span Submarine Pipelines: Integral Transform SolutionDocument14 pagesDynamic Response of Free-Span Submarine Pipelines: Integral Transform Solutionnicholas_j_vaughanNo ratings yet
- Dynamic Modeling of A Springboard During A 3 M Dive: Procedia EngineeringDocument6 pagesDynamic Modeling of A Springboard During A 3 M Dive: Procedia Engineering0paulo0No ratings yet
- Direct Simulation Method For Flutter Stability of Bridge DeckDocument8 pagesDirect Simulation Method For Flutter Stability of Bridge DeckSaang Bum KimNo ratings yet
- CFD Approach To Modelling Hydrodynamic Characteristics of Underwater GliderDocument14 pagesCFD Approach To Modelling Hydrodynamic Characteristics of Underwater GliderAnh NgoNo ratings yet
- Variable Ratio Control Strategy For A Rear Wheel Active SteeringDocument13 pagesVariable Ratio Control Strategy For A Rear Wheel Active SteeringBerkay ÇelikNo ratings yet
- Gajewski2015 PDFDocument8 pagesGajewski2015 PDFanilpradeepNo ratings yet
- Huang 2018 IOP Conf. Ser. Earth Environ. Sci. 108 032045Document8 pagesHuang 2018 IOP Conf. Ser. Earth Environ. Sci. 108 032045Gabriel BancillonNo ratings yet
- Eolica BallenaDocument13 pagesEolica Ballenajulibri30No ratings yet
- Urai 2017 7992893Document6 pagesUrai 2017 7992893Sama AshleighNo ratings yet
- Sensors: Neural Network-Based Self-Tuning PID Control For Underwater VehiclesDocument18 pagesSensors: Neural Network-Based Self-Tuning PID Control For Underwater VehiclesMiguel Angel GualitoNo ratings yet
- Application of An Improved Ant Colony Optimization On General - 2012 - Energy PRDocument7 pagesApplication of An Improved Ant Colony Optimization On General - 2012 - Energy PRGiang LêNo ratings yet
- Design and Control of Hybrid Underwater GliderDocument9 pagesDesign and Control of Hybrid Underwater GliderAnh NgoNo ratings yet
- Sun 2020 J. Phys. Conf. Ser. 1650 032079Document13 pagesSun 2020 J. Phys. Conf. Ser. 1650 032079AmpNo ratings yet
- Solid-Liquid Two-Phase Flow Numerical Simulation Around Guide Vanes of Mixed-Flow Water TurbineDocument5 pagesSolid-Liquid Two-Phase Flow Numerical Simulation Around Guide Vanes of Mixed-Flow Water TurbineKevin Valiant CahyaNo ratings yet
- V4N2Document6 pagesV4N2Muh IchsanNo ratings yet
- A Study of The In-Plane Force Transmission of Tires: H. R. DorfiDocument26 pagesA Study of The In-Plane Force Transmission of Tires: H. R. DorfisiritapeNo ratings yet
- 547 002 PDFDocument19 pages547 002 PDFLikhon BiswasNo ratings yet
- Curved I-Girder Design: Esign TheDocument19 pagesCurved I-Girder Design: Esign TheLikhon BiswasNo ratings yet
- Dumitriu 2018 IOP Conf. Ser. Mater. Sci. Eng. 400 042020 PDFDocument10 pagesDumitriu 2018 IOP Conf. Ser. Mater. Sci. Eng. 400 042020 PDFFabiano OliveiraNo ratings yet
- SpacecraftattitudefaultDocument15 pagesSpacecraftattitudefaultGodwin TheckinethNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- XCMG Xct25l5 y ArsanDocument6 pagesXCMG Xct25l5 y ArsanNaufal Raihan RiandiNo ratings yet
- Fs 6406aDocument20 pagesFs 6406aMiguelLalanguiNo ratings yet
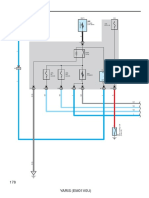
- Power Window: 178 YARIS (EM01V0U)Document5 pagesPower Window: 178 YARIS (EM01V0U)tharngalNo ratings yet
- 1998 Terex T340 Electric Schematic Lower-2Document2 pages1998 Terex T340 Electric Schematic Lower-2RussMahn100% (1)
- Intake Manifold Air Pressure Is HighDocument2 pagesIntake Manifold Air Pressure Is Highnay hlaing SoeNo ratings yet
- Catalogo Bujes SuspensionDocument36 pagesCatalogo Bujes SuspensionCARLOS SALGADONo ratings yet
- Jet EngineDocument15 pagesJet EngineViswanathan SrkNo ratings yet
- sv621 1905Document2 pagessv621 1905yanwu shangNo ratings yet
- Diagramas+Eléctricos+FORD+FOCUS+L4-2 0L+2013Document94 pagesDiagramas+Eléctricos+FORD+FOCUS+L4-2 0L+2013jmiltonh100% (1)
- Hyundai Nexo Technical SpecificationsDocument3 pagesHyundai Nexo Technical SpecificationsJonas Rayet100% (1)
- 5-Disc Brake - Types and Constructional Details, Relative Advantages and DisDocument46 pages5-Disc Brake - Types and Constructional Details, Relative Advantages and DisYASH JITENDRA BHAKATNo ratings yet
- Haldex Air Brake Systen and ProductsDocument164 pagesHaldex Air Brake Systen and Productshebert perezNo ratings yet
- BDET Knowl QuestDocument3 pagesBDET Knowl QuestenjoythedocsNo ratings yet
- Engine Manual OM460 KM OM460 E 00Document247 pagesEngine Manual OM460 KM OM460 E 00HANAFI YUSUF100% (1)
- HF25Document8 pagesHF25marran almarranyNo ratings yet
- Get PDFDocument5 pagesGet PDFRonald Moon100% (1)
- Yanmar SC 2400 Operator's ManualDocument133 pagesYanmar SC 2400 Operator's ManualplbeauregardNo ratings yet
- Formatos de Mtto Ejemplo Pm500hrs TRACSADocument5 pagesFormatos de Mtto Ejemplo Pm500hrs TRACSAKYPCONNo ratings yet
- Mounting Accessories: Loader CraneDocument45 pagesMounting Accessories: Loader Cranevictor hugoNo ratings yet
- Fuel Consumption by EngineDocument2 pagesFuel Consumption by EngineRie ReiNo ratings yet
- Engine Parts ManualDocument70 pagesEngine Parts ManualElvis Culma GallegoNo ratings yet
- Husqvarna TC 142T - 96051014600 (2016-08) Parts Diagram For DRIVEDocument6 pagesHusqvarna TC 142T - 96051014600 (2016-08) Parts Diagram For DRIVEmarcos garciaNo ratings yet
- Install Instructions ! Billet Power Blocks (BPB) ! 2013-2017 Subaru Crosstrek / 2012-2016 Impreza 2.0i !Document13 pagesInstall Instructions ! Billet Power Blocks (BPB) ! 2013-2017 Subaru Crosstrek / 2012-2016 Impreza 2.0i !Mauriece CarrilloNo ratings yet
- Mitsubishi-Canter 2015 EN US D9c70c6a1d (001-100)Document100 pagesMitsubishi-Canter 2015 EN US D9c70c6a1d (001-100)Omar Espinoza SanchezNo ratings yet
- 16V2000M93Document226 pages16V2000M93jm teknik dizel motor jeneratör teknik servisiNo ratings yet
- Aw55-50 SNDocument15 pagesAw55-50 SNactiongb1100% (3)
- Mitsubishi Elenessa (001-184) (165-184)Document20 pagesMitsubishi Elenessa (001-184) (165-184)Marco AlgueraNo ratings yet
- Point FormDocument19 pagesPoint FormEric TalaidNo ratings yet
- Aircraft Characteristics Affecting Airport Design: Gaurav Srivastava Civil Engg Deptt. Foet, LuDocument36 pagesAircraft Characteristics Affecting Airport Design: Gaurav Srivastava Civil Engg Deptt. Foet, LuGAURAV SRIVASTAVANo ratings yet