You might also like
- Stuckpipe Course by IPM Schlumberger PDFDocument23 pagesStuckpipe Course by IPM Schlumberger PDFddiazveNo ratings yet
- Jediism Pocket Book - Church of JediismDocument7 pagesJediism Pocket Book - Church of JediismANo ratings yet
- Matlab Robotics ToolboxDocument20 pagesMatlab Robotics ToolboxRajesh RavindranNo ratings yet
- Design of Oressurized Irrigation SystemsDocument413 pagesDesign of Oressurized Irrigation SystemsCisse Twizeyimana100% (7)
- Reviewing Data EmpowerDocument48 pagesReviewing Data Empowersaldanhalopes6660% (1)
- New Yellow Book 01-07-2014Document115 pagesNew Yellow Book 01-07-2014scegts100% (2)
- 10-Ion Exchange F11Document11 pages10-Ion Exchange F11Fitra Isni Rosita100% (2)
- Fundamental of Robotics: Lab ReportDocument9 pagesFundamental of Robotics: Lab Reportjawad naseerNo ratings yet
- Fundamentals of Robotics: Lab ReportDocument13 pagesFundamentals of Robotics: Lab ReportTayyab KhalilNo ratings yet
- Fundamentals of Robotics: Lab ReportDocument13 pagesFundamentals of Robotics: Lab ReportTayyab KhalilNo ratings yet
- Computer Graphics Notes Unit - 1 & 2Document41 pagesComputer Graphics Notes Unit - 1 & 2Gowtham SKNo ratings yet
- Constant Kinetic Energy Robot Trajectory PlanningDocument16 pagesConstant Kinetic Energy Robot Trajectory PlanningstaktikaNo ratings yet
- Path Tracking For A Miniature RobotDocument9 pagesPath Tracking For A Miniature RobotDarshan Rai KanungoNo ratings yet
- Velocity Motion Model: x x y θ v ω r= v ω xDocument3 pagesVelocity Motion Model: x x y θ v ω r= v ω xJay WooNo ratings yet
- Motion Planning As Probabilistic Inference Using Gaussian Processes and Factor GraphsDocument9 pagesMotion Planning As Probabilistic Inference Using Gaussian Processes and Factor GraphsmusikmitmartinNo ratings yet
- Equations of Motion NotesDocument12 pagesEquations of Motion NotesSurya Phani Krishna NukalaNo ratings yet
- Applications of Space Science PHYC40730 Satellite Navigation Assignment (Submission Deadline: See Module's Brightspace)Document6 pagesApplications of Space Science PHYC40730 Satellite Navigation Assignment (Submission Deadline: See Module's Brightspace)krishnaNo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- Mechanical Engineering Department, IST, IslamabadDocument9 pagesMechanical Engineering Department, IST, Islamabadengr2487No ratings yet
- RoboticsDocument9 pagesRoboticsKrishna Prakash NanduriNo ratings yet
- 747 ProjectDocument9 pages747 ProjectYvan PierreNo ratings yet
- Autonomous Robot Motion Path Planning Using Shortest Path Planning AlgorithmsDocument5 pagesAutonomous Robot Motion Path Planning Using Shortest Path Planning AlgorithmsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Path Following Mobile Robot in The Presence of Velocity ConstraintsDocument12 pagesPath Following Mobile Robot in The Presence of Velocity ConstraintsmonikNo ratings yet
- Assinment 1Document4 pagesAssinment 1Abhijit AroopNo ratings yet
- Laboratorium Teknik Kimia: Fakultas Teknik Upn "Veteran" Jawa TimurDocument17 pagesLaboratorium Teknik Kimia: Fakultas Teknik Upn "Veteran" Jawa TimurNur Rokhma SNo ratings yet
- On Algorithms For Planning S-Curve Motion ProfilesDocument8 pagesOn Algorithms For Planning S-Curve Motion Profilessadiqaftab786No ratings yet
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocument49 pages19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- Determining The Magnetic Field of A Circular Current Using Biot-Savart's LawDocument2 pagesDetermining The Magnetic Field of A Circular Current Using Biot-Savart's LawPhạm Hoàng SơnNo ratings yet
- SlamDocument16 pagesSlamHemasagar RajuNo ratings yet
- ATT13 IeconDocument6 pagesATT13 IeconJohn ArvanitakisNo ratings yet
- S Curve AlgorithDocument8 pagesS Curve AlgorithfmjmxNo ratings yet
- Isise 2012 59Document4 pagesIsise 2012 59Duy KhổngNo ratings yet
- Rectilinear Kinematics PDFDocument15 pagesRectilinear Kinematics PDFDaniel Naoe FestinNo ratings yet
- Name:Ishwor Acharya Rollno: 076MSMDE008 Matlab Code For Non-Lifting Cylinder Velocity PotentialDocument6 pagesName:Ishwor Acharya Rollno: 076MSMDE008 Matlab Code For Non-Lifting Cylinder Velocity PotentialishworNo ratings yet
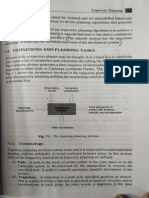
- Definitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which TheDocument7 pagesDefinitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which The20131A5327 KONDETI SHIVA NARASIMHANo ratings yet
- Unit 3 Overview of Transformation SayliDocument30 pagesUnit 3 Overview of Transformation SayliKrishnaNo ratings yet
- Eru 2010 SLAM PaperDocument3 pagesEru 2010 SLAM PaperHasala DharmawardenaNo ratings yet
- Richter 2016Document18 pagesRichter 2016Dedy BehiNo ratings yet
- Computer GraphicsDocument59 pagesComputer GraphicsKanika KadianNo ratings yet
- Engg100 Project 08 HDocument13 pagesEngg100 Project 08 HSean Kurian George100% (1)
- Adaptive Optimal Path Following For High Wind FlightsDocument6 pagesAdaptive Optimal Path Following For High Wind FlightsirqoviNo ratings yet
- Stewart Platform Resumen KinematicsDocument5 pagesStewart Platform Resumen KinematicsMontserrat Franco DelgadoNo ratings yet
- Trajectory Planning in Cartesian Space: Robotics 1Document21 pagesTrajectory Planning in Cartesian Space: Robotics 1Krisandi AgustoNo ratings yet
- Stochastic Multi-Depot Capacitated Vehicle Routing Problem With Pickup and Delivery: Heuristic ApproachesDocument4 pagesStochastic Multi-Depot Capacitated Vehicle Routing Problem With Pickup and Delivery: Heuristic Approachesataide.gustavoNo ratings yet
- MATLAB Programs, For 7th Sem CSE Students - Tushar KantDocument4 pagesMATLAB Programs, For 7th Sem CSE Students - Tushar KantJámès KõstãNo ratings yet
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDocument3 pages3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNo ratings yet
- Algorithms For Planning S-CurveDocument8 pagesAlgorithms For Planning S-Curvebeemer03No ratings yet
- ENGR 058 (Control Theory) Final: 1) Define The SystemDocument24 pagesENGR 058 (Control Theory) Final: 1) Define The SystemBizzleJohnNo ratings yet
- Instantaneous Frequency Estimation Using TVAR ModelingDocument22 pagesInstantaneous Frequency Estimation Using TVAR ModelingravitadishettiNo ratings yet
- A Novel Implementation of GEO Satellite Step Track SubsystemDocument6 pagesA Novel Implementation of GEO Satellite Step Track SubsystemAnastasis MpelesiwthsNo ratings yet
- LAB 11: Implementation of Forward Kinematics and Inverse Kinematics On 3 DOF Serial Manipulator in MatlabDocument3 pagesLAB 11: Implementation of Forward Kinematics and Inverse Kinematics On 3 DOF Serial Manipulator in MatlabUsman IlamdinNo ratings yet
- AIT Lab ManualDocument38 pagesAIT Lab ManualHari KrishnaNo ratings yet
- Trajectory Planning of A SCARA Manipulator Using PRM For Collision AvoidanceDocument6 pagesTrajectory Planning of A SCARA Manipulator Using PRM For Collision AvoidancedoglasnegriNo ratings yet
- Multi-Rate Path Following ControlDocument6 pagesMulti-Rate Path Following ControlBinhMinh NguyenNo ratings yet
- Class Notes, Trajectory Planning, COMS4733: 1 TrajectoriesDocument9 pagesClass Notes, Trajectory Planning, COMS4733: 1 TrajectoriesVashish RamrechaNo ratings yet
- Curvilinear Motion PDFDocument49 pagesCurvilinear Motion PDFDaniel Naoe FestinNo ratings yet
- PS2 Lab ManualDocument37 pagesPS2 Lab ManualFariha shaikhNo ratings yet
- Clemson University College of Engineering and Science Control and Robotics (CRB) Technical ReportDocument8 pagesClemson University College of Engineering and Science Control and Robotics (CRB) Technical ReportMazin el-HagNo ratings yet
- SN Sec 12-4 12-5Document19 pagesSN Sec 12-4 12-5bigbangmelvanNo ratings yet
- Lab 1Document7 pagesLab 1mo2419270No ratings yet
- Improved PFM MRPPDocument6 pagesImproved PFM MRPPSercan ArslanNo ratings yet
- Global Institute of Engineering and TechnologyDocument13 pagesGlobal Institute of Engineering and TechnologyMeer Mustafa AliNo ratings yet
- FOR ppt5Document10 pagesFOR ppt55002- Ajay.RNo ratings yet
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackDocument5 pagesPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotNo ratings yet
- Astm E10 23Document15 pagesAstm E10 23misterwhiddenNo ratings yet
- Odd Sem Class Time Table 2023-24Document4 pagesOdd Sem Class Time Table 2023-24Sudip NeupaneNo ratings yet
- Idle Speed: Testing and InspectionDocument1 pageIdle Speed: Testing and InspectionDaniel GarciaNo ratings yet
- Sound in ArchitectureDocument11 pagesSound in ArchitectureSush SampathNo ratings yet
- A Review: Phase Transformation and Wear Mechanisms of Single-Step and Dual-Step Austempered Ductile IronsDocument16 pagesA Review: Phase Transformation and Wear Mechanisms of Single-Step and Dual-Step Austempered Ductile IronsHandcrafting BeautiesNo ratings yet
- Module 2 (Answered)Document33 pagesModule 2 (Answered)Roland Paul PrincipeNo ratings yet
- Kisi-Kisi Matematika - 9.2Document5 pagesKisi-Kisi Matematika - 9.2Doni Dounkink DounutsNo ratings yet
- Westinghouse Lighting Price List Industrial HID Lighting 6-79Document4 pagesWestinghouse Lighting Price List Industrial HID Lighting 6-79Alan MastersNo ratings yet
- Acid-Base Crime Scene TitrationDocument6 pagesAcid-Base Crime Scene TitrationTracy RojasNo ratings yet
- The Z-Transform and Discrete-Time Lti SystemsDocument78 pagesThe Z-Transform and Discrete-Time Lti SystemsKevin Angelo MaNo ratings yet
- Acterna OLS15Document4 pagesActerna OLS15Hai MaiNo ratings yet
- Greenhouse Gases 2017Document11 pagesGreenhouse Gases 2017AnusheenNo ratings yet
- Information About PVDocument2 pagesInformation About PVpasistNo ratings yet
- Zalamea Seminar ReadingsDocument28 pagesZalamea Seminar ReadingstmfjonesNo ratings yet
- C1 2005 JunDocument11 pagesC1 2005 JunBasile SymNo ratings yet
- 0606 w14 QP 13Document16 pages0606 w14 QP 13AKRAMNo ratings yet
- Sheet-Piles Design Using Free-Earth Support MethodDocument7 pagesSheet-Piles Design Using Free-Earth Support MethodJulien MhannaNo ratings yet
- Draft Franck HertzDocument2 pagesDraft Franck HertzDini IstiqomahNo ratings yet
- Chlorobenzene From Benzene and Chlorine: Design of A Chlorobenzene Distillation UnitDocument14 pagesChlorobenzene From Benzene and Chlorine: Design of A Chlorobenzene Distillation UnitJabel PatesNo ratings yet
- Suwanasri ThanapongDocument137 pagesSuwanasri ThanapongrobertosavaNo ratings yet
- Analisis Kesulitan Siswa Dalam Mempelajari SPLTVDocument16 pagesAnalisis Kesulitan Siswa Dalam Mempelajari SPLTVbaon26_872384938No ratings yet
- HW3 Spring19Document2 pagesHW3 Spring19Alex Williams0% (1)
- Solutions To Concepts: Chapter - 3Document16 pagesSolutions To Concepts: Chapter - 3Ramesh BadamNo ratings yet
- From Spaceships To Orbiting StationsDocument136 pagesFrom Spaceships To Orbiting StationsBob Andrepont100% (1)