You might also like
- Seminario 6. Implant Placement Accuracy Using Dynamic NavigationDocument8 pagesSeminario 6. Implant Placement Accuracy Using Dynamic NavigationLenny GrauNo ratings yet
- Jomi 5004Document8 pagesJomi 5004Fernando Ari del CorroNo ratings yet
- X GuideNavigationModelAccuracyJOI10.16Document7 pagesX GuideNavigationModelAccuracyJOI10.16Mrinmayee ThakurNo ratings yet
- Computer Technology Applications in Surgical Implant Dentistry: A Systematic ReviewDocument18 pagesComputer Technology Applications in Surgical Implant Dentistry: A Systematic ReviewsujeetNo ratings yet
- Static or Dynamic Navigation For Implant PlacementDocument9 pagesStatic or Dynamic Navigation For Implant PlacementMrinmayee ThakurNo ratings yet
- Diving Deep Into The Concepts of Dynamic Navigation System in Implant Dentistry A ReviewDocument4 pagesDiving Deep Into The Concepts of Dynamic Navigation System in Implant Dentistry A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dynamic Navigation For Surgical Implant Placement: Overview of Technology, Key Concepts, and A Case ReportDocument9 pagesDynamic Navigation For Surgical Implant Placement: Overview of Technology, Key Concepts, and A Case Reportreem mohamedNo ratings yet
- Block2017 Navigation Is More AccurateDocument10 pagesBlock2017 Navigation Is More AccurateDavid CNo ratings yet
- Aaid Joi D 16 00025Document31 pagesAaid Joi D 16 00025Fernando Ari del CorroNo ratings yet
- S - 2019 - Influence of Implant Macrodesign and Insertion Connection Technology On The Accuracy of Static Computer-Assisted Implant SurgeryDocument7 pagesS - 2019 - Influence of Implant Macrodesign and Insertion Connection Technology On The Accuracy of Static Computer-Assisted Implant SurgeryVõHoàngThủyTiênNo ratings yet
- Efficacy of Implant Placement With Surgical Guides in T 2022 Advances in OraDocument6 pagesEfficacy of Implant Placement With Surgical Guides in T 2022 Advances in OraГне ДзжNo ratings yet
- Panchal 2019Document9 pagesPanchal 2019Fernando Ari del CorroNo ratings yet
- Minimal Invasiveness at Dental Implant Placement A Systematic Review With Meta-Analyses On Flapless Fully Guided SurgeryDocument24 pagesMinimal Invasiveness at Dental Implant Placement A Systematic Review With Meta-Analyses On Flapless Fully Guided Surgerymahesh kumarNo ratings yet
- 2019 - Yeung Et Al - Accuracy and Precision of 3d-Printed Implant Surgical Guideswith Different Implant Systems An in Vitro StudyDocument8 pages2019 - Yeung Et Al - Accuracy and Precision of 3d-Printed Implant Surgical Guideswith Different Implant Systems An in Vitro StudyRafael FedaltoNo ratings yet
- Accuracy of Dental Implant Surgery Using Dynamic Navigation and Robotic Systems - An in Vitro StudyDocument8 pagesAccuracy of Dental Implant Surgery Using Dynamic Navigation and Robotic Systems - An in Vitro StudyAlejandra MonsalveNo ratings yet
- 10 1016@j Prosdent 2019 05 027Document8 pages10 1016@j Prosdent 2019 05 027OctavioJose DuarteFrenkyNo ratings yet
- The Accuracy of Static vs. Dynamic Computer Assisted ImplantDocument10 pagesThe Accuracy of Static vs. Dynamic Computer Assisted ImplantDenisa CorneaNo ratings yet
- Cirugia Asistida Por ComputadoraDocument18 pagesCirugia Asistida Por ComputadoraPaola Alexandra LaguadoNo ratings yet
- Arndt Guentsch An in Vitro Analysis of The Accuracy ofDocument11 pagesArndt Guentsch An in Vitro Analysis of The Accuracy ofHayley NicNo ratings yet
- 2017 Laleman - Guided Implant Surgery in The Edentulous Maxilla - A Systematic ReviewDocument15 pages2017 Laleman - Guided Implant Surgery in The Edentulous Maxilla - A Systematic ReviewFabio FabrettiNo ratings yet
- Accuracy of Computer-Aided Template-Guided Oral Implant Placement A Prospective Clinical StudyDocument10 pagesAccuracy of Computer-Aided Template-Guided Oral Implant Placement A Prospective Clinical StudyMário LúcioNo ratings yet
- S - 2018 - Accuracy of Newly Developed Sleeve-Designed Templates For Insertion of Dental ImplantsDocument6 pagesS - 2018 - Accuracy of Newly Developed Sleeve-Designed Templates For Insertion of Dental ImplantsVõHoàngThủyTiênNo ratings yet
- CBCT Ch.7 DCNADocument30 pagesCBCT Ch.7 DCNAgibsonNo ratings yet
- Computer-Assisted Craniomaxillofacial Surgery: Sean P. EdwardsDocument18 pagesComputer-Assisted Craniomaxillofacial Surgery: Sean P. Edwardshasan nazzalNo ratings yet
- Cat e ImplantesDocument5 pagesCat e ImplantesBlas García GarcíaNo ratings yet
- Implant OlogyDocument14 pagesImplant OlogyAya M RashidiNo ratings yet
- Accuracy of Half Guided Implant Placement With Machine DrivenDocument9 pagesAccuracy of Half Guided Implant Placement With Machine DrivenGustavo IsmaelNo ratings yet
- JCM 10 00704 v2Document18 pagesJCM 10 00704 v2Mrinmayee ThakurNo ratings yet
- Radiological Templates and Cad/Cam Surgical Guides-A Literature ReviewDocument37 pagesRadiological Templates and Cad/Cam Surgical Guides-A Literature ReviewMaqbul AlamNo ratings yet
- Impact of Surgical Template On The Accuracy of Implant PlacementDocument7 pagesImpact of Surgical Template On The Accuracy of Implant PlacementSnehil LodhiNo ratings yet
- Moamen M Sarhan Evaluation of The Accuracy of ImplantDocument8 pagesMoamen M Sarhan Evaluation of The Accuracy of ImplantHayley NicNo ratings yet
- C.E. Credit. Effect of Steam Sterilization On Accuracy of 3D Printed Implant Surgical Guides A Pilot StudyDocument7 pagesC.E. Credit. Effect of Steam Sterilization On Accuracy of 3D Printed Implant Surgical Guides A Pilot Studymarcela fajardoNo ratings yet
- Accuracy of Implant Placement With Computer-Guided SurgeryDocument15 pagesAccuracy of Implant Placement With Computer-Guided SurgerydentureNo ratings yet
- Virtual Planning of ImplantDocument6 pagesVirtual Planning of ImplantChekkarraj Sharanya KeshapurNo ratings yet
- Navigation in Minimally Invasive Spine Surgery: Sohrab Virk, Sheeraz QureshiDocument6 pagesNavigation in Minimally Invasive Spine Surgery: Sohrab Virk, Sheeraz QureshiliuyonglogNo ratings yet
- Implant Surgical Guides From The Past To The PresentDocument6 pagesImplant Surgical Guides From The Past To The Presentwaf51No ratings yet
- Torque en Insercion y ExtraccionDocument10 pagesTorque en Insercion y ExtraccionGiovanni Eduardo Medina MartinezNo ratings yet
- Accuracy of Implant Placement With A Esterolitografia PDFDocument8 pagesAccuracy of Implant Placement With A Esterolitografia PDFSamuel Flores CalderonNo ratings yet
- Using A Clinical Protocol For Orthognathic Surgery and Assessing A 3-Dimensional Virtual ApproachDocument15 pagesUsing A Clinical Protocol For Orthognathic Surgery and Assessing A 3-Dimensional Virtual ApproachKorkmaz SayınsuNo ratings yet
- Orentlicher 2011Document30 pagesOrentlicher 2011OctavioJose DuarteFrenkyNo ratings yet
- From Implant Planning To Surgical Execution An Integrated Approach For Surgery in Oral ImplantologyDocument10 pagesFrom Implant Planning To Surgical Execution An Integrated Approach For Surgery in Oral ImplantologyDenisa CorneaNo ratings yet
- Accuracy of Different SurgicalDocument8 pagesAccuracy of Different SurgicalVõHoàngThủyTiênNo ratings yet
- The Accuracy of Implant Placement With Computer-GuidedDocument11 pagesThe Accuracy of Implant Placement With Computer-GuidedRyan Ardi PradanaNo ratings yet
- Isdigitalguidedimplant Surgeryaccurateand Reliable?: Firas Al Yafi,, Brittany Camenisch,, Mohanad Al-SabbaghDocument17 pagesIsdigitalguidedimplant Surgeryaccurateand Reliable?: Firas Al Yafi,, Brittany Camenisch,, Mohanad Al-SabbaghDANTE DELEGUERYNo ratings yet
- Charles J. GoodacreDocument11 pagesCharles J. GoodacreAngela Quintero CalderonNo ratings yet
- Navi y GuiadaDocument14 pagesNavi y GuiadaDr.CdiazNo ratings yet
- Guided Surgery in Dental ImplantologyDocument5 pagesGuided Surgery in Dental Implantologynarendra singhNo ratings yet
- 2018 - The Influence of Guided Sleeve Height, Drilling Distance and Drilling Key Length On The Accuracy of Static ComputerAssisted Implant SurgeryDocument7 pages2018 - The Influence of Guided Sleeve Height, Drilling Distance and Drilling Key Length On The Accuracy of Static ComputerAssisted Implant SurgeryVõHoàngThủyTiênNo ratings yet
- Augmented Reality Visualization For Image Guided SDocument10 pagesAugmented Reality Visualization For Image Guided SPaulo Ferreira OrtodontiaNo ratings yet
- Dental Implant Navigation System Guide The Surgery Future: SciencedirectDocument9 pagesDental Implant Navigation System Guide The Surgery Future: SciencedirectrachmadyNo ratings yet
- Implant SeminarDocument62 pagesImplant SeminarDr. Abdulsalam Awas Dental CenterNo ratings yet
- Automatic Tool Segmentation and Tracking During Robotic Intravascular Catheterization For Cardiac InterventionsDocument23 pagesAutomatic Tool Segmentation and Tracking During Robotic Intravascular Catheterization For Cardiac InterventionsNishant UzirNo ratings yet
- Implant Planning and Placement Using Optical Scanning and Cone Beam CT TechnologyDocument6 pagesImplant Planning and Placement Using Optical Scanning and Cone Beam CT TechnologyPraveen Raj ThakurNo ratings yet
- A Prospective Study On The Accuracy of Mucosally Supported Stereolithographic Surgical Guides in Fully Edentulous MaxillaeDocument11 pagesA Prospective Study On The Accuracy of Mucosally Supported Stereolithographic Surgical Guides in Fully Edentulous MaxillaeSilpayNo ratings yet
- SICATDocument40 pagesSICATBenjaporn AuttagangNo ratings yet
- Accuracy of Digital Predictions With CAD CAM Labial and L - 2018 - Seminars in O PDFDocument14 pagesAccuracy of Digital Predictions With CAD CAM Labial and L - 2018 - Seminars in O PDFOmy J. CruzNo ratings yet
- Ijss Feb Ra01Document5 pagesIjss Feb Ra01Ruxandra FitaNo ratings yet
- Periodontology 2000 - 2022 - Chackartchi - Reducing Errors in Guided Implant Surgery To Optimize Treatment OutcomesDocument9 pagesPeriodontology 2000 - 2022 - Chackartchi - Reducing Errors in Guided Implant Surgery To Optimize Treatment OutcomesDr.CdiazNo ratings yet
- Advanced Applications of Cone Beam Computed Tomography in OrthodonticsDocument15 pagesAdvanced Applications of Cone Beam Computed Tomography in Orthodonticsaung NaingmyoNo ratings yet
- Zygomatic Implants: Optimization and InnovationFrom EverandZygomatic Implants: Optimization and InnovationJames ChowNo ratings yet
- Static and Dynamic Navigation in Two Implants CasesDocument7 pagesStatic and Dynamic Navigation in Two Implants CasesMrinmayee ThakurNo ratings yet
- Totth Implant Vs Free ImplantDocument10 pagesTotth Implant Vs Free ImplantMrinmayee ThakurNo ratings yet
- Implant Navigation Advantages and Disadvantages Gargallo-Albiol2019Document10 pagesImplant Navigation Advantages and Disadvantages Gargallo-Albiol2019Mrinmayee ThakurNo ratings yet
- Effect of Conventional Half Digital and Full Digital Fabrication Techniques On Retention and Apical Gap of Post and CoreDocument6 pagesEffect of Conventional Half Digital and Full Digital Fabrication Techniques On Retention and Apical Gap of Post and CoreMrinmayee ThakurNo ratings yet
- 5 Comparacao Dos Dois Sistemas DisponiveisDocument6 pages5 Comparacao Dos Dois Sistemas DisponiveisAlysson DiógenesNo ratings yet
- Review of Removable Partial DenturesDocument353 pagesReview of Removable Partial DenturesAndrei Celac78% (9)
- Comparative Study of Occlusal Contact Marking Indicators: Tanya P. BozhkovaDocument5 pagesComparative Study of Occlusal Contact Marking Indicators: Tanya P. BozhkovaMrinmayee ThakurNo ratings yet
- A Systematic Review of Clinical Trials On Digital Impression of Prepared TeethDocument6 pagesA Systematic Review of Clinical Trials On Digital Impression of Prepared TeethBagis Emre GulNo ratings yet
- Dr. Ubhare Et Al: CAD/CAM Era in ProsthodonticsDocument24 pagesDr. Ubhare Et Al: CAD/CAM Era in ProsthodonticsMrinmayee ThakurNo ratings yet
- JCM 10 00704 v2Document18 pagesJCM 10 00704 v2Mrinmayee ThakurNo ratings yet
- Clinical Application of Various Surgical Guides For Optimal Implant PlacementDocument9 pagesClinical Application of Various Surgical Guides For Optimal Implant PlacementMrinmayee ThakurNo ratings yet
- 10 1016@j Prosdent 2020 01 041Document2 pages10 1016@j Prosdent 2020 01 041Mrinmayee ThakurNo ratings yet
- Transfer of Posterior Palatal Seal Area On Maxillary Cast: A Modified TechniqueDocument2 pagesTransfer of Posterior Palatal Seal Area On Maxillary Cast: A Modified TechniqueMrinmayee ThakurNo ratings yet
- Clinical Application of Various Surgical Guides For Optimal Implant PlacementDocument9 pagesClinical Application of Various Surgical Guides For Optimal Implant PlacementMrinmayee ThakurNo ratings yet
- Transfer of Posterior Palatal Seal Area On Maxillary Cast: A Modified TechniqueDocument2 pagesTransfer of Posterior Palatal Seal Area On Maxillary Cast: A Modified TechniqueMrinmayee ThakurNo ratings yet
- Dr. Ubhare Et Al: CAD/CAM Era in ProsthodonticsDocument24 pagesDr. Ubhare Et Al: CAD/CAM Era in ProsthodonticsMrinmayee ThakurNo ratings yet
- Fabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmDocument3 pagesFabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmMrinmayee ThakurNo ratings yet
- 10 1016@j Prosdent 2020 01 041Document2 pages10 1016@j Prosdent 2020 01 041Mrinmayee ThakurNo ratings yet
- ImpressionsDocument5 pagesImpressionsPadmini ReddyNo ratings yet
- Fabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmDocument3 pagesFabricating An Inexpensive Leaf Gauge Deprogrammer From Panoramic Radiographic FilmMrinmayee ThakurNo ratings yet
- Simple CASC StationsDocument74 pagesSimple CASC Stationssherief marouf100% (2)
- Positioning Strategy - Mineral WaterDocument2 pagesPositioning Strategy - Mineral WaterRakesh SelvamNo ratings yet
- Diagnostic Evaluation and Management of The Solitary Pulmonary NoduleDocument21 pagesDiagnostic Evaluation and Management of The Solitary Pulmonary NoduleGonzalo Leal100% (1)
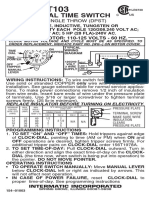
- T103 InstructionsDocument1 pageT103 Instructionsjtcool74No ratings yet
- Secrets of Sexual ExstasyDocument63 pagesSecrets of Sexual Exstasy19LucianNo ratings yet
- ACLS Post Test (Copy) 낱말 카드 - QuizletDocument18 pagesACLS Post Test (Copy) 낱말 카드 - Quizlet김민길No ratings yet
- Park Agreement LetterDocument2 pagesPark Agreement LetterKrishna LalNo ratings yet
- Northbrook CollegeDocument10 pagesNorthbrook CollegeDaniyal AsifNo ratings yet
- Ideal Discharge Elderly PatientDocument3 pagesIdeal Discharge Elderly PatientFelicia Risca RyandiniNo ratings yet
- Hotel Transportation and Discount Information Chart - February 2013Document29 pagesHotel Transportation and Discount Information Chart - February 2013scfp4091No ratings yet
- Death Obituary Cause of Death Ookht PDFDocument4 pagesDeath Obituary Cause of Death Ookht PDFMayerRhodes8No ratings yet
- CNA Candidate HandbookDocument57 pagesCNA Candidate HandbookSummerNo ratings yet
- LivingScience CBSE CompanionDocument56 pagesLivingScience CBSE Companionnjlenovo95% (19)
- தமிழ் உணவு வகைகள் (Tamil Cuisine) (Archive) - SkyscraperCityDocument37 pagesதமிழ் உணவு வகைகள் (Tamil Cuisine) (Archive) - SkyscraperCityAsantony Raj0% (1)
- Week 2 - ValEdDocument30 pagesWeek 2 - ValEdBernadette MacalindongNo ratings yet
- Health Module 6 g7Document26 pagesHealth Module 6 g7Richelle PamintuanNo ratings yet
- IS 11255 - 7 - 2005 - Reff2022 Methods For Measurement of Emission From Stationary Sources Part 7 Oxides of NitrogenDocument10 pagesIS 11255 - 7 - 2005 - Reff2022 Methods For Measurement of Emission From Stationary Sources Part 7 Oxides of NitrogenPawan SharmaNo ratings yet
- HOME TECH - HOME TEXTILE REVIEW. Ayman SatopayDocument12 pagesHOME TECH - HOME TEXTILE REVIEW. Ayman SatopayAyman SatopayNo ratings yet
- C50SCR PLC Complete ManualDocument286 pagesC50SCR PLC Complete ManualthuanNo ratings yet
- BURNS GeneralDocument59 pagesBURNS GeneralValluri MukeshNo ratings yet
- Fire BehaviourDocument4 pagesFire BehaviourFirezky CuNo ratings yet
- Ahsan Menu KolachiDocument12 pagesAhsan Menu Kolachisalman GtrNo ratings yet
- Basic Concepts and Applied Aspect of Sharir RachnaDocument122 pagesBasic Concepts and Applied Aspect of Sharir RachnaRam Krish100% (1)
- Mpez-6 Installation Manual - Inline 201007Document8 pagesMpez-6 Installation Manual - Inline 201007api-244989438No ratings yet
- Transdermal Nano BookDocument44 pagesTransdermal Nano BookMuhammad Azam TahirNo ratings yet
- Toolbox Talks - Near Miss ReportingDocument1 pageToolbox Talks - Near Miss ReportinganaNo ratings yet
- Eric CHE326 JournalpptDocument33 pagesEric CHE326 JournalpptRugi Vicente RubiNo ratings yet
- Hydroprocessing Pilot PlantsDocument4 pagesHydroprocessing Pilot PlantsNattapong PongbootNo ratings yet
- The Importance of Early Childhood InterventionDocument11 pagesThe Importance of Early Childhood Interventionsilverlining0814100% (3)
- Deductions From Gross IncomeDocument2 pagesDeductions From Gross Incomericamae saladagaNo ratings yet