You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- CX-5 Technical Guide Workshop ManualDocument1,910 pagesCX-5 Technical Guide Workshop ManualRafael Olave67% (6)
- FP Diesel Dodge Truck - DigipubzDocument68 pagesFP Diesel Dodge Truck - DigipubzRafael GarciaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Golf CartDocument45 pagesGolf CartDominique VoirinNo ratings yet
- Manual de Instalação - Perkins 2800S - (ING)Document134 pagesManual de Instalação - Perkins 2800S - (ING)Jair Ferreira Angelo JuniorNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Case Hydraulics Excavators 1188 Shop ManualDocument318 pagesCase Hydraulics Excavators 1188 Shop ManualВалерийБылинин94% (33)
- Shop Manual Pc800Document1,117 pagesShop Manual Pc800Aya Jibo83% (6)
- Manual 6l50Document84 pagesManual 6l50franceli ferreira reisNo ratings yet
- NorTrac Owner's ManualDocument150 pagesNorTrac Owner's ManualSoares Cardoso100% (1)
- PDFDocument44 pagesPDFedascribdNo ratings yet
- Current Flow Diagram CAGA OnlyDocument24 pagesCurrent Flow Diagram CAGA OnlyAlex PeterNo ratings yet
- Cutting Machine Inspection ChecklistDocument1 pageCutting Machine Inspection ChecklistThein Myint OoNo ratings yet
- MTU Rail SalesProgramDocument37 pagesMTU Rail SalesProgramRoyenNo ratings yet
- La Electronica PeDocument11 pagesLa Electronica PeRaul ContrerasNo ratings yet
- LM2903 LM393 LM393A LM293A - FairchildDocument9 pagesLM2903 LM393 LM393A LM293A - FairchildElectronicos CaldasNo ratings yet
- Dual Operational Amplifier: Features DescriptionsDocument11 pagesDual Operational Amplifier: Features DescriptionsElectronicos CaldasNo ratings yet
- Optically coupled bilateral switch non-zero crossing triac datasheetDocument3 pagesOptically coupled bilateral switch non-zero crossing triac datasheetElectronicos CaldasNo ratings yet
- Small Signal Product Taiwan Semiconductor: MCR100-3 - MCR100-8Document5 pagesSmall Signal Product Taiwan Semiconductor: MCR100-3 - MCR100-8Electronicos CaldasNo ratings yet
- LM393B, LM2903B, LM193, LM293, LM393 and LM2903 Dual ComparatorsDocument52 pagesLM393B, LM2903B, LM193, LM293, LM393 and LM2903 Dual ComparatorsElectronicos CaldasNo ratings yet
- LM324/LM324A, LM2902/LM2902A: Quad Operational AmplifierDocument13 pagesLM324/LM324A, LM2902/LM2902A: Quad Operational AmplifierElectronicos CaldasNo ratings yet
- Irf540npbf 1732489Document10 pagesIrf540npbf 1732489Eduardo BustosNo ratings yet
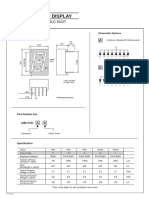
- 5161 Series 7 Segment LED DisplaysDocument1 page5161 Series 7 Segment LED DisplaysElectronicos CaldasNo ratings yet
- HEF4071B: 1. General DescriptionDocument11 pagesHEF4071B: 1. General DescriptionElectronicos CaldasNo ratings yet
- NTE7029 Integrated Circuit Module - AF Power Amp, 2-Channel, 100W MinDocument2 pagesNTE7029 Integrated Circuit Module - AF Power Amp, 2-Channel, 100W MinElectronicos CaldasNo ratings yet
- HCF4050B: Hex Buffer/Converter (Non Inverting)Document9 pagesHCF4050B: Hex Buffer/Converter (Non Inverting)Electronicos CaldasNo ratings yet
- Irfb4227Pbf: FeaturesDocument8 pagesIrfb4227Pbf: FeaturesdinnhowNo ratings yet
- Irf9530, Sihf9530: Vishay SiliconixDocument8 pagesIrf9530, Sihf9530: Vishay SiliconixKrista TranNo ratings yet
- Diodos - 6a05-6a10Document2 pagesDiodos - 6a05-6a10Rogerio AlmeidaNo ratings yet
- HEF4511B: 1. General DescriptionDocument19 pagesHEF4511B: 1. General DescriptionElectronicos CaldasNo ratings yet
- 2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsDocument6 pages2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsElectronicos CaldasNo ratings yet
- Silicon Rectifier Diodes PRV: 50 - 1000 Volts Io: 1.5 AmperesDocument2 pagesSilicon Rectifier Diodes PRV: 50 - 1000 Volts Io: 1.5 Amperesmauricio alfonsoNo ratings yet
- NTE7029 Integrated Circuit Module - AF Power Amp, 2-Channel, 100W MinDocument2 pagesNTE7029 Integrated Circuit Module - AF Power Amp, 2-Channel, 100W MinElectronicos CaldasNo ratings yet
- NTE74181 Integrated Circuit TTL Arithmetic Logic Unit/Function GeneratorDocument8 pagesNTE74181 Integrated Circuit TTL Arithmetic Logic Unit/Function GeneratorElectronicos CaldasNo ratings yet
- NTE4514B & NTE4515B Integrated Circuit CMOS, 4 Bit Latch/4 To 16 Line DecoderDocument5 pagesNTE4514B & NTE4515B Integrated Circuit CMOS, 4 Bit Latch/4 To 16 Line DecoderElectronicos CaldasNo ratings yet
- Transistor 2SA1943Document2 pagesTransistor 2SA1943Gustavo LarrahondoNo ratings yet
- NTE552 Silicon Rectifier General Purpose, Fast Recovery: FeaturesDocument1 pageNTE552 Silicon Rectifier General Purpose, Fast Recovery: FeaturesElectronicos CaldasNo ratings yet
- NTE548 High Voltage Rectifier for Industrial MicrowaveDocument1 pageNTE548 High Voltage Rectifier for Industrial MicrowaveElectronicos CaldasNo ratings yet
- NTE373 (NPN) & NTE374 (PNP) Silicon Complementary Transistors Audio Amplifier, DriverDocument2 pagesNTE373 (NPN) & NTE374 (PNP) Silicon Complementary Transistors Audio Amplifier, DriverElectronicos CaldasNo ratings yet
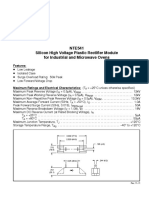
- NTE541 Silicon High Voltage Plastic Rectifier Module For Industrial and Microwave OvensDocument1 pageNTE541 Silicon High Voltage Plastic Rectifier Module For Industrial and Microwave OvensElectronicos CaldasNo ratings yet
- NTE638 Damper Diode: Absolute Maximum RatingsDocument1 pageNTE638 Damper Diode: Absolute Maximum RatingsElectronicos CaldasNo ratings yet
- NTE517 Silicon High Voltage Plastic Rectifier For Industrial and Microwave OvenDocument1 pageNTE517 Silicon High Voltage Plastic Rectifier For Industrial and Microwave OvenElectronicos CaldasNo ratings yet
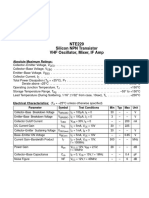
- NTE229 Silicon NPN Transistor VHF Oscillator, Mixer, IF Amp: Absolute Maximum RatingsDocument2 pagesNTE229 Silicon NPN Transistor VHF Oscillator, Mixer, IF Amp: Absolute Maximum RatingsElectronicos CaldasNo ratings yet
- Bosch Automotive Battery GuideDocument28 pagesBosch Automotive Battery GuideSA khNo ratings yet
- 9852 1007 01j Maintenance Instructions COP 1840,1840EXDocument32 pages9852 1007 01j Maintenance Instructions COP 1840,1840EXrolandNo ratings yet
- Sanjay C - PC181219Document89 pagesSanjay C - PC181219PRADYUMNA .SNo ratings yet
- Top Gear 2021 12 UK-121-156Document36 pagesTop Gear 2021 12 UK-121-156Jaydev RavalNo ratings yet
- Ce-20 Water Blaster Slim Line 500 Bar: 3X 220 V 60 HZDocument31 pagesCe-20 Water Blaster Slim Line 500 Bar: 3X 220 V 60 HZRusmansyah100% (1)
- 12H, 140H, 160H Motor Grader Electrical System (ES Version) : Machine Harness Connector and Component LocationsDocument2 pages12H, 140H, 160H Motor Grader Electrical System (ES Version) : Machine Harness Connector and Component LocationsGilvan JuniorNo ratings yet
- Wind Tunnel BalancesDocument33 pagesWind Tunnel BalancesJones arun rajNo ratings yet
- ECCE2009SampleTest 5 14Document10 pagesECCE2009SampleTest 5 14jonathan CunalataNo ratings yet
- Seventyfive Percent Palang ToDocument11 pagesSeventyfive Percent Palang Tosikowitz oliverNo ratings yet
- r520lc 9s NewDocument10 pagesr520lc 9s Newkillsonicjhames.limaNo ratings yet
- Well Considered: The Product Development ProcessDocument2 pagesWell Considered: The Product Development ProcessKiran BathiniNo ratings yet
- Ausa Mixers 500RX-X1100RH-ENG PDFDocument2 pagesAusa Mixers 500RX-X1100RH-ENG PDFAsad AijazNo ratings yet
- Solar pump inverter operation manual chapter guideDocument56 pagesSolar pump inverter operation manual chapter guideNé Togo Yé AbuNo ratings yet
- Tractor FORD 4000 4Document2 pagesTractor FORD 4000 4Alex CastilloNo ratings yet
- CATALOGO Adaconn-Inserta Product Catalog 2010Document70 pagesCATALOGO Adaconn-Inserta Product Catalog 2010Eduardo Mata GamezNo ratings yet
- Parking Brake System: SectionDocument10 pagesParking Brake System: SectionPiyapong SaerimNo ratings yet
- Lec2 PDFDocument28 pagesLec2 PDFJaco MarketlandNo ratings yet
- Department of Automobile Engineering: Lab ManualDocument15 pagesDepartment of Automobile Engineering: Lab ManualAbhishek LalkiyaNo ratings yet