You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 8 Part Eye Exam RevisedDocument17 pages8 Part Eye Exam RevisedpasambalyrradjohndarNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NPR Piston Ring Sets & Cylinder Lines PDFDocument159 pagesNPR Piston Ring Sets & Cylinder Lines PDFImran Mehboob67% (6)
- African Cookbook 2nd EditionDocument144 pagesAfrican Cookbook 2nd EditionTuğçe Dinçer100% (1)
- Us6288386-Circuit Having A Flexible Printed PDFDocument29 pagesUs6288386-Circuit Having A Flexible Printed PDFja2ja1100% (1)
- Eddy Current Testing in NDTDocument43 pagesEddy Current Testing in NDTMeby Selvaraj RNo ratings yet
- Urine AnalysisDocument69 pagesUrine AnalysisAffan ElahiNo ratings yet
- Haramase Simulator Achievement GuideDocument3 pagesHaramase Simulator Achievement GuideRisdiansyah 08633% (9)
- Hydrometeorological Hazard StudentDocument26 pagesHydrometeorological Hazard StudentMargaret Nicole100% (1)
- Top Solid'DesignDocument3,768 pagesTop Solid'Designja2ja1No ratings yet
- Sky 5999 02 Inflight Flyer VF WebDocument4 pagesSky 5999 02 Inflight Flyer VF Webja2ja1No ratings yet
- Training Fact Sheet - Controlled Flight Into Terrain: CFIT - How Does It Happen?Document2 pagesTraining Fact Sheet - Controlled Flight Into Terrain: CFIT - How Does It Happen?ja2ja1No ratings yet
- "In Your Defense": A Defensive Strategy For Helicopter PilotsDocument2 pages"In Your Defense": A Defensive Strategy For Helicopter Pilotsja2ja1100% (1)
- Bulletin Cfit HtawsDocument2 pagesBulletin Cfit Htawsja2ja1No ratings yet
- Commercial Aviation ProductsDocument6 pagesCommercial Aviation Productsja2ja1No ratings yet
- Night Eyes Aviation Brochure Rev 3 - Final SmallDocument2 pagesNight Eyes Aviation Brochure Rev 3 - Final Smallja2ja1No ratings yet
- Us6924931 PDFDocument10 pagesUs6924931 PDFja2ja1No ratings yet
- Elastomeric Isolation MountsDocument78 pagesElastomeric Isolation Mountsja2ja1No ratings yet
- Exoskeleton Power and Torque Requirements Based On Human BiomechanicsDocument54 pagesExoskeleton Power and Torque Requirements Based On Human Biomechanicsja2ja1No ratings yet
- On The Mechanical Design of The Berkeley Lower Extremity Exoskeleton (BLEEX)Document8 pagesOn The Mechanical Design of The Berkeley Lower Extremity Exoskeleton (BLEEX)ja2ja1No ratings yet
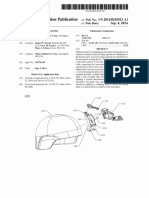
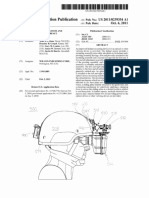
- US20140245523-Helmet Mountuing Systems - Kopia PDFDocument22 pagesUS20140245523-Helmet Mountuing Systems - Kopia PDFja2ja1No ratings yet
- US7418738-Vertical Adjustment Flip-Up PDFDocument15 pagesUS7418738-Vertical Adjustment Flip-Up PDFja2ja1No ratings yet
- US20130083391A1-Monocular - Binocular Bridge - Kopia PDFDocument20 pagesUS20130083391A1-Monocular - Binocular Bridge - Kopia PDFja2ja1No ratings yet
- USD705890-Folding Front Sight For A FirearmDocument7 pagesUSD705890-Folding Front Sight For A Firearmja2ja1No ratings yet
- US20110239354-Helmet Mounting System and Mounting Shoe Interface - Kopia PDFDocument29 pagesUS20110239354-Helmet Mounting System and Mounting Shoe Interface - Kopia PDFja2ja1No ratings yet
- Us6101676 PDFDocument7 pagesUs6101676 PDFja2ja1No ratings yet
- US20120113503A1-M914 Improved Dual Carriage Head Mount and Dual Battery Compartment Systems PDFDocument21 pagesUS20120113503A1-M914 Improved Dual Carriage Head Mount and Dual Battery Compartment Systems PDFja2ja1No ratings yet
- Patent Application Publication (10) Pub. No.: US 2010/0084.249 A1Document8 pagesPatent Application Publication (10) Pub. No.: US 2010/0084.249 A1ja2ja1No ratings yet
- SCM Domino S Pizza Final B7Document17 pagesSCM Domino S Pizza Final B7radhika guptaNo ratings yet
- Poach An EggDocument7 pagesPoach An EggiegorjNo ratings yet
- Botulism Is A Serious Illness Caused by The Botulinum ToxinDocument10 pagesBotulism Is A Serious Illness Caused by The Botulinum ToxinReyNo ratings yet
- For Binding Sop 2.0 SpaceDocument133 pagesFor Binding Sop 2.0 SpaceABELLO LAILA S.No ratings yet
- English Education Tasks Exclusive BreastfeedingDocument6 pagesEnglish Education Tasks Exclusive BreastfeedingRisa Q. AmaliaNo ratings yet
- Continuous Monitoring SystemDocument3 pagesContinuous Monitoring SystemsamiNo ratings yet
- Specific GravityDocument11 pagesSpecific GravityTrisha OstanNo ratings yet
- Effects of Carbohydrate Crystallization On Stability of Dehydrated Foods and Ingredient FormulationsDocument9 pagesEffects of Carbohydrate Crystallization On Stability of Dehydrated Foods and Ingredient FormulationsIsra CFNo ratings yet
- P.E.S. Pu CollegeDocument6 pagesP.E.S. Pu CollegeSamrudh BhaskarNo ratings yet
- Convergent Plate BoundariesDocument45 pagesConvergent Plate Boundariesjherwinperez2007No ratings yet
- Hazardous Wastes Management Handling and Transboundary Movement Rules 2008Document40 pagesHazardous Wastes Management Handling and Transboundary Movement Rules 2008Shashank BhardwajNo ratings yet
- Services Bulletins Model 150kDocument8 pagesServices Bulletins Model 150kPaola RabeloNo ratings yet
- Module 2Document33 pagesModule 2Varshini MNo ratings yet
- Juri MCQDocument6 pagesJuri MCQmukul sidhqueNo ratings yet
- Sensor HardwareDocument34 pagesSensor HardwareLoya SrijaNo ratings yet
- Suicide by Firearm Toolkit For ChangeDocument28 pagesSuicide by Firearm Toolkit For ChangeSara WilliamsNo ratings yet
- Different Aspects of MindfulnessDocument38 pagesDifferent Aspects of MindfulnessShan BooksNo ratings yet
- Ancamide 261a UsDocument11 pagesAncamide 261a UsdamiendamNo ratings yet
- Prevention of Infection in The Hospital SettingDocument100 pagesPrevention of Infection in The Hospital SettingShantie Harun Al RosyidNo ratings yet
- Swedish Neutral Neutral Earthing Resistor Specification PDFDocument12 pagesSwedish Neutral Neutral Earthing Resistor Specification PDFRazvan CostacheNo ratings yet
- Schuetziana 5 2014 1Document41 pagesSchuetziana 5 2014 1Vladimir RadenkovicNo ratings yet
- Pre Ut U11sDocument2 pagesPre Ut U11sSvetlanaNo ratings yet
- Spider SilkDocument5 pagesSpider SilkimranNo ratings yet