You might also like
- Communications USADocument51 pagesCommunications USAPierre BonivardNo ratings yet
- Annual Symposium, Exhibition & Firing Demonstration The Oto Melara HITROLE 7,62 - 12,7 - 40 MM Remote Overhead, Light Electrical TurretDocument32 pagesAnnual Symposium, Exhibition & Firing Demonstration The Oto Melara HITROLE 7,62 - 12,7 - 40 MM Remote Overhead, Light Electrical TurretPierre BonivardNo ratings yet
- Fire Control Systems and Radar FundamentalsDocument79 pagesFire Control Systems and Radar FundamentalsPierre Bonivard100% (1)
- 2003 - Call Sign For ShipsDocument218 pages2003 - Call Sign For ShipsPierre BonivardNo ratings yet
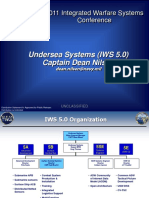
- Undersea Systems (IWS 5.0) Captain Dean Nilsen: 2011 Integrated Warfare Systems ConferenceDocument36 pagesUndersea Systems (IWS 5.0) Captain Dean Nilsen: 2011 Integrated Warfare Systems ConferencePierre BonivardNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Report of The Ministry, Overseas Military Forces of Canada, 1918Document652 pagesReport of The Ministry, Overseas Military Forces of Canada, 1918bswyatt100% (1)
- Nationalism Webquest Bismarck..Document3 pagesNationalism Webquest Bismarck..Karol Mateusz SuchyNo ratings yet
- Global Interstate System: Assoc. Prof. Jose Ricarte B. OrigenesDocument38 pagesGlobal Interstate System: Assoc. Prof. Jose Ricarte B. OrigenesWelwel SumabatNo ratings yet
- Middle Ages Bingo BoardDocument2 pagesMiddle Ages Bingo Boardapi-236997217No ratings yet
- Cato Institute: Annual Report 2006Document50 pagesCato Institute: Annual Report 2006Cato InstituteNo ratings yet
- ResoDocument2 pagesResokate jungNo ratings yet
- Evaluating The Cultural Revolution in China and Its Legacy For The FutureDocument86 pagesEvaluating The Cultural Revolution in China and Its Legacy For The FutureCommunist PartyNo ratings yet
- Greece-8-Dodecanese v1 m56577569830517601Document39 pagesGreece-8-Dodecanese v1 m56577569830517601Camila GregoskiNo ratings yet
- Platoon Leader - PunDocument21 pagesPlatoon Leader - PunPATRICKNo ratings yet
- The Center For Migration Studies of New York, Inc. Is Collaborating With JSTOR To Digitize, Preserve andDocument33 pagesThe Center For Migration Studies of New York, Inc. Is Collaborating With JSTOR To Digitize, Preserve andMohamed Ghazy Jr.No ratings yet
- Orpheus & AeneasDocument5 pagesOrpheus & AeneasMatthew Pippin KemmitNo ratings yet
- UntitledDocument368 pagesUntitled星尘No ratings yet
- Morrowind Character Creation ADocument20 pagesMorrowind Character Creation AaerythvolterraNo ratings yet
- The Foundation of Kalhora Power in Larkana & Kamber-Shahdadkot Districts of Upper Sindh PakistanDocument6 pagesThe Foundation of Kalhora Power in Larkana & Kamber-Shahdadkot Districts of Upper Sindh PakistanSheikh Javed Ali SindhiNo ratings yet
- Game Save Manager Supported GamesDocument87 pagesGame Save Manager Supported GamesLuke Anthony MasonNo ratings yet
- Security Oversight & Tactical Ref Sheet PFDocument2 pagesSecurity Oversight & Tactical Ref Sheet PFKaravageKidNo ratings yet
- History Paper One Chapter 1Document17 pagesHistory Paper One Chapter 1Ann LinNo ratings yet
- The Life of A Roman Soldier: by Calum JohnsonDocument24 pagesThe Life of A Roman Soldier: by Calum JohnsonIvan VišnjićNo ratings yet
- PAW Fiction - Tired Old Man (Gary D Ott) - The New CrusadesDocument244 pagesPAW Fiction - Tired Old Man (Gary D Ott) - The New CrusadesBruce ArmstrongNo ratings yet
- Navy Public Affairs DirectoryDocument61 pagesNavy Public Affairs DirectoryWashington BureauNo ratings yet
- APUSH Test BankDocument91 pagesAPUSH Test BankYoung Park75% (8)
- PC Powerplay AprilDocument100 pagesPC Powerplay AprilRazvan LupuNo ratings yet
- Announcing PETA's Sexiest Vegetarian Soldiers! - PETADocument7 pagesAnnouncing PETA's Sexiest Vegetarian Soldiers! - PETARobert LuciusNo ratings yet
- Papal Armies in The XIII CenturyDocument31 pagesPapal Armies in The XIII CenturyMauri FurlanNo ratings yet
- The Rohingya QuestionDocument13 pagesThe Rohingya QuestionAnirudh AryaNo ratings yet
- Wiki Book MumbaiDocument116 pagesWiki Book MumbaiprovolotNo ratings yet
- From Trade To TerritoryDocument7 pagesFrom Trade To TerritorySharad MusaleNo ratings yet
- Unit 3 & 4Document41 pagesUnit 3 & 4Mauricio Andre Rojas SerranoNo ratings yet
- Title: Anna and The King Director: Andy Tennant SynopsisDocument2 pagesTitle: Anna and The King Director: Andy Tennant SynopsisjinyoungNo ratings yet
- Tips - Romancing The Shadow Poe and Race PDFDocument311 pagesTips - Romancing The Shadow Poe and Race PDFDušan Jakovljević100% (1)