You might also like
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Laporan Praktikum Komunikasi Data 2: Damas Yusli Arfani 2 Aec 217341056Document11 pagesLaporan Praktikum Komunikasi Data 2: Damas Yusli Arfani 2 Aec 217341056Dayuar DyaNo ratings yet
- JK FF CounterDocument1 pageJK FF Counterzero okNo ratings yet
- 31Document9 pages31ALNATRON GROUPSNo ratings yet
- Arduino LCD ThermostatDocument6 pagesArduino LCD Thermostatmzovkic8No ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemKaththi Karthick100% (1)
- Surveillance Robotic CarDocument10 pagesSurveillance Robotic CarSlakshmi NarayanaNo ratings yet
- Solar Powered Wifi Weather Station V2.0: InstructablesDocument31 pagesSolar Powered Wifi Weather Station V2.0: InstructablesCristian Ruiz S.No ratings yet
- Lab 4 - Lcds and AccelerometersDocument8 pagesLab 4 - Lcds and AccelerometersAlmahdiSalehNo ratings yet
- Odometry SensorsDocument20 pagesOdometry Sensorssunxing22No ratings yet
- STM32F4 Discovery Board Pinou Diagram Details, Features and ExamplesDocument11 pagesSTM32F4 Discovery Board Pinou Diagram Details, Features and ExamplesJsi DevNo ratings yet
- TMS320C6748 DSP BOARD Package ContentDocument22 pagesTMS320C6748 DSP BOARD Package ContentPrangya PradhanNo ratings yet
- ME-447 Lab Final Exam Paper BDocument7 pagesME-447 Lab Final Exam Paper BSaad RasheedNo ratings yet
- D Digi Ital Elec Ctro Onic Cs La AB: L Lab M Manu UALDocument41 pagesD Digi Ital Elec Ctro Onic Cs La AB: L Lab M Manu UALArrnaav Singh RathoreeNo ratings yet
- SYNDEM EduKit ManualDocument78 pagesSYNDEM EduKit Manualimrankhan1995No ratings yet
- ESP32 Module Power Supply: PIQ101 PIQ101Document1 pageESP32 Module Power Supply: PIQ101 PIQ101Section Maintenance LP-Blériot100% (1)
- WinAVR AVRStudio TutorialDocument4 pagesWinAVR AVRStudio Tutorialaverage_1986No ratings yet
- Makalah CPU Dan StorageDocument9 pagesMakalah CPU Dan StorageAdi SuripiyantoNo ratings yet
- EE 212 L Microprocessor and Microcontroller: Lab ManualDocument77 pagesEE 212 L Microprocessor and Microcontroller: Lab Manualrizwan900No ratings yet
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Document6 pagesTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- Document On Interfacing ADC With 8051 MicrocontrollerDocument5 pagesDocument On Interfacing ADC With 8051 MicrocontrollerSrideviKumaresanNo ratings yet
- Embedded Sys. & Robotics WorkshopDocument5 pagesEmbedded Sys. & Robotics WorkshopPriyanka SharmaNo ratings yet
- ADC Program For LPC2138Document8 pagesADC Program For LPC2138hypernuclide100% (1)
- 6416 DSK Quickstartguide PDFDocument4 pages6416 DSK Quickstartguide PDFpriyanirumaNo ratings yet
- Lab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Document33 pagesLab 1 Introduction To Stm32F103 and Ide: St-Link V2 and Keil Uvision5Kiều NguyễnNo ratings yet
- Ecad & Vlsi LabDocument98 pagesEcad & Vlsi LabbitseceNo ratings yet
- NI Tutorial 3115 enDocument3 pagesNI Tutorial 3115 enajith.ganesh2420No ratings yet
- A Development Platform For Microcontroller STM32F103Document67 pagesA Development Platform For Microcontroller STM32F103picatilioNo ratings yet
- CAN Bus in PSoC Report210Document16 pagesCAN Bus in PSoC Report210Marcos Antonio EstremoteNo ratings yet
- EMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVDocument36 pagesEMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVspringsource100% (1)
- 2.4G Transceiver NRF24L01 Module User's Manual v2.0Document12 pages2.4G Transceiver NRF24L01 Module User's Manual v2.0Nina FloydNo ratings yet
- ESP32 CAM Surveillance SPY Camera CarDocument3 pagesESP32 CAM Surveillance SPY Camera CarKanwerpreet SinghNo ratings yet
- Design and Implementation of Pulse Code Modulation Using Matlab SimulinkDocument4 pagesDesign and Implementation of Pulse Code Modulation Using Matlab SimulinkAprialdy StreetfootballNo ratings yet
- Timer Counter in ARM7 (LPC2148) : Aarav SoniDocument26 pagesTimer Counter in ARM7 (LPC2148) : Aarav SoniMatthew BattleNo ratings yet
- Ks0191 Keyestudio Smart Small Turtle RobotDocument40 pagesKs0191 Keyestudio Smart Small Turtle RobotvansanvansanNo ratings yet
- Chapter 5 - The Processor, Datapath and ControlDocument23 pagesChapter 5 - The Processor, Datapath and ControlBijay MishraNo ratings yet
- Micro Controller Lab Manual 1Document38 pagesMicro Controller Lab Manual 1Suresh KumarNo ratings yet
- ADC (Analog-To-Digital Converter)Document11 pagesADC (Analog-To-Digital Converter)Abdullah Muzammil0% (1)
- Fpga ManualDocument7 pagesFpga ManualRahul SharmaNo ratings yet
- Microprocessors & Interfacing Lab ManualDocument30 pagesMicroprocessors & Interfacing Lab Manualjeravi84100% (1)
- Iot Based System For Heart Rate Monitoring IJERTV9IS070673Document9 pagesIot Based System For Heart Rate Monitoring IJERTV9IS070673Penrose LearningNo ratings yet
- Automatic Fan Speed Control Circuit Using PIC16F877A MicrocontrollerDocument5 pagesAutomatic Fan Speed Control Circuit Using PIC16F877A MicrocontrollerPramillaNo ratings yet
- Notes04 ADCDocument9 pagesNotes04 ADCHosam BendaryNo ratings yet
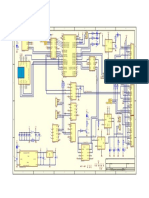
- Autosteer ESP V1.2 SchematicsDocument1 pageAutosteer ESP V1.2 SchematicsŽivoin Bogdanov100% (1)
- mcb1700 LAB - Intro - ARM Cortex m3Document22 pagesmcb1700 LAB - Intro - ARM Cortex m3RagulANNo ratings yet
- STM32F407VGT General-Purpose I/Os (GPIO)Document5 pagesSTM32F407VGT General-Purpose I/Os (GPIO)service informatiqueNo ratings yet
- FSM in VHDLDocument10 pagesFSM in VHDLkunalsekhri123No ratings yet
- Propeller Clock AbstractDocument1 pagePropeller Clock AbstractChaitanya Vuddanti100% (1)
- VHDL Code For Flipflop D, JK, SR, TDocument7 pagesVHDL Code For Flipflop D, JK, SR, TPeter HerreraNo ratings yet
- Tutorial 2 On Using The LCD On The Spartan 3E Starter Kit BoardDocument13 pagesTutorial 2 On Using The LCD On The Spartan 3E Starter Kit BoardJesús Vazquez100% (1)
- Programming Practices With SimulatorsDocument11 pagesProgramming Practices With Simulatorsarun0% (2)
- PIC Microcontroller IntroductionDocument81 pagesPIC Microcontroller Introductionpnlinh2850% (2)
- VHDL Digital NAND Gate Program.Document14 pagesVHDL Digital NAND Gate Program.Muchamad Aldi AnantaNo ratings yet
- How To Interfacing Sensor With LPC2148 ARMDocument8 pagesHow To Interfacing Sensor With LPC2148 ARMSubir MaityNo ratings yet
- Autonomous Floor Cleaning Robot With Infrared and UltrasonicDocument7 pagesAutonomous Floor Cleaning Robot With Infrared and UltrasonicInternational Journal of Innovative Science and Research Technology100% (1)
- Accelerometer Based Hand Gesture Controlled Robot Using ArduinoDocument10 pagesAccelerometer Based Hand Gesture Controlled Robot Using ArduinoRaj AryanNo ratings yet
- Uart Gps Neo-6m (B) - Neo 6 DatasheetDocument27 pagesUart Gps Neo-6m (B) - Neo 6 Datasheetnion83No ratings yet
- Lab 05 To Perform Signal Companding in SimulinkDocument15 pagesLab 05 To Perform Signal Companding in SimulinkArshad AliNo ratings yet
- Linear Control TCDocument46 pagesLinear Control TCjibranbaladiNo ratings yet
- Car NRF Receiver - InoDocument3 pagesCar NRF Receiver - InoOctavian AlexaNo ratings yet
- Creating DML Triggers Part IIDocument5 pagesCreating DML Triggers Part IICatalina AchimNo ratings yet
- PFDDocument8 pagesPFDTherese HernandezNo ratings yet
- Analysis of Paradox in Rupi Kaur's HungerDocument2 pagesAnalysis of Paradox in Rupi Kaur's HungerHarumingga OgustariaNo ratings yet
- Whatsapp Chat AnalyserDocument11 pagesWhatsapp Chat AnalyserRobin HoodNo ratings yet
- Colorado State University Inclusive Language GuideDocument8 pagesColorado State University Inclusive Language GuideColoradoan67% (3)
- Fire Extinguishing RobotDocument4 pagesFire Extinguishing RobotPrajwal shettyNo ratings yet
- Mmpi 2 AutismDocument10 pagesMmpi 2 AutismvictorpsycheNo ratings yet
- Male Muslim NamesDocument6 pagesMale Muslim NamesBilal KhanNo ratings yet
- Excel TipsDocument2 pagesExcel Tipsjtibrewala6250No ratings yet
- Analysis of Metaphors in "The A Team - Ed Sheeran"Document10 pagesAnalysis of Metaphors in "The A Team - Ed Sheeran"al373752No ratings yet
- Cetiya Chart SayadawadjustedfinalDocument1 pageCetiya Chart SayadawadjustedfinalThant Zaw MyintNo ratings yet
- Muslim Education Prior To MadrassasDocument29 pagesMuslim Education Prior To MadrassasMohammad Shujaul haq baigNo ratings yet
- Unit 2 - LESSON PLAN YR 4 KSSRDocument5 pagesUnit 2 - LESSON PLAN YR 4 KSSRPak KuNo ratings yet
- SIM7500 - SIM7600 Series - GNSS - Application Note - V3.00Document20 pagesSIM7500 - SIM7600 Series - GNSS - Application Note - V3.00AlbertoGonzálezNo ratings yet
- Math DLP - RatioDocument4 pagesMath DLP - RatioPenny Lou AndresNo ratings yet
- Ob Config GuideDocument22 pagesOb Config Guidehlnstcks100% (1)
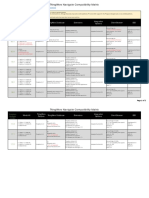
- ThingWorx Navigate Compatibility MatrixDocument2 pagesThingWorx Navigate Compatibility Matrixair_jajaNo ratings yet
- Art CritiqueDocument47 pagesArt CritiqueChrissa Jem Lee OpilloNo ratings yet
- History of English LiteratureDocument1 pageHistory of English LiteratureSahil Zargar67% (3)
- 21st Century Literature Activity Sheet 01 - Pre-Colonial LiteratureDocument3 pages21st Century Literature Activity Sheet 01 - Pre-Colonial LiteratureIanne Violet Yumierre TabañagNo ratings yet
- HTML5 Interview Questions PDFDocument6 pagesHTML5 Interview Questions PDFPrashant ArayaNo ratings yet
- Bca 2Document7 pagesBca 2Ramkrishna JanaNo ratings yet
- CTW Resource Writing Exegetical PapersDocument5 pagesCTW Resource Writing Exegetical PapersTeemu LehtonenNo ratings yet
- TOEFL Speaking - GeneralEnglish - IrDocument7 pagesTOEFL Speaking - GeneralEnglish - Irshabrang photoNo ratings yet
- EDUPHARMA Komunikasi Efektif Praktik Apoteker Umi AthiyahDocument29 pagesEDUPHARMA Komunikasi Efektif Praktik Apoteker Umi AthiyahAyu WijiNo ratings yet
- 6 Transmitter Characteristics: 6.1 GeneralDocument401 pages6 Transmitter Characteristics: 6.1 GeneraldongsunNo ratings yet
- Islam and Early Muslim InvadersDocument18 pagesIslam and Early Muslim InvadersSrira BanerjeeNo ratings yet
- Chapter 1: Introduction To Computers and Programming: Starting Out With C++ Early Objects Ninth Edition, Global EditionDocument34 pagesChapter 1: Introduction To Computers and Programming: Starting Out With C++ Early Objects Ninth Edition, Global Editioncys96No ratings yet
- P.4 Religious Education Test QuestionsDocument9 pagesP.4 Religious Education Test QuestionsSean LiamNo ratings yet
- Project ReportDocument24 pagesProject ReportBahroz RashidNo ratings yet