You might also like
- Backscatter and Seabed Image ReflectivityDocument5 pagesBackscatter and Seabed Image ReflectivityJuan David SantanaNo ratings yet
- Rfic Radar 2Document8 pagesRfic Radar 2Artur LevikinNo ratings yet
- Models.aco.Saw Gas SensorDocument20 pagesModels.aco.Saw Gas Sensorchefzapvp1234567No ratings yet
- Ren VLSI07Document2 pagesRen VLSI07jainarayanNo ratings yet
- CPW on BCB for THz frequenciesDocument8 pagesCPW on BCB for THz frequenciesskinhugoNo ratings yet
- PT 4: Capteur de Gaz À Ondes Élastiques de SurfaceDocument20 pagesPT 4: Capteur de Gaz À Ondes Élastiques de SurfaceHubert TekouaNo ratings yet
- electronicdesign.comDocument13 pageselectronicdesign.comPitNo ratings yet
- 3D Seismic Survey DesignDocument10 pages3D Seismic Survey DesignMahmood KhanNo ratings yet
- Cleo 1995Document2 pagesCleo 1995Armando Humberto Nolasco PintoNo ratings yet
- ECEN-610: Low-Power CT Sigma-Delta ADC Design for Multi-Standard AppsDocument5 pagesECEN-610: Low-Power CT Sigma-Delta ADC Design for Multi-Standard AppsBinod AdhikariNo ratings yet
- Frequency Response of Basic BJT and MOSFET Amplifiers: (Review Materials in Appendices III and V)Document42 pagesFrequency Response of Basic BJT and MOSFET Amplifiers: (Review Materials in Appendices III and V)Jawath BinaNo ratings yet
- Chapter 3: Antennas For Wireless SystemsDocument14 pagesChapter 3: Antennas For Wireless SystemsAbdul KarimNo ratings yet
- (1967) Digital Pulse Compression Radar ReceiverDocument9 pages(1967) Digital Pulse Compression Radar ReceiverAlex YangNo ratings yet
- PMD Tolerant Direct-Detection Optical OFDM SystemDocument2 pagesPMD Tolerant Direct-Detection Optical OFDM SystemZainab FaydhNo ratings yet
- Of A A: N, Superstrate Layers Are Chosen According To The Angle 6Document4 pagesOf A A: N, Superstrate Layers Are Chosen According To The Angle 6Mayank BhargavaNo ratings yet
- Design of A Dual Band Microstrip Antenna Using Reactive LoadingDocument5 pagesDesign of A Dual Band Microstrip Antenna Using Reactive LoadingPrathamesh BhatNo ratings yet
- Predict Resonances of Shielded PCBsDocument8 pagesPredict Resonances of Shielded PCBskhanafzaal2576No ratings yet
- Chapter 5 QBDocument7 pagesChapter 5 QBduppal35No ratings yet
- Lecture 7: Modulation I: Chapter 6 - Modulation Techniques For Mobile RadioDocument73 pagesLecture 7: Modulation I: Chapter 6 - Modulation Techniques For Mobile RadioShakeel AminNo ratings yet
- Co-Channel Interference Analysis of Point To PointDocument5 pagesCo-Channel Interference Analysis of Point To PointRinalds RitmanisNo ratings yet
- Digital BeamformingDocument9 pagesDigital Beamforming김성환No ratings yet
- Leung - VLSI For Wireless Communication 2e - Solutions ManualDocument122 pagesLeung - VLSI For Wireless Communication 2e - Solutions Manualkrishnak_ece7077No ratings yet
- Compact Microstrip Bandstop Filter for UWB ApplicationDocument11 pagesCompact Microstrip Bandstop Filter for UWB Application1822601No ratings yet
- Link Budget Radio Channel PropertiesDocument14 pagesLink Budget Radio Channel PropertiesUmer Farooque RathoreNo ratings yet
- Guided Mode Resonance Flat-Top Bandpass Filter For Terahertz Telecom ApplicationsDocument4 pagesGuided Mode Resonance Flat-Top Bandpass Filter For Terahertz Telecom ApplicationsPhạmThanhSơnNo ratings yet
- Shanon HartleyDocument5 pagesShanon Hartleynlb53No ratings yet
- Novdec10 SolutionsDocument5 pagesNovdec10 SolutionsJesus GarciaNo ratings yet
- Properties of Ridge Waveguide PDFDocument6 pagesProperties of Ridge Waveguide PDFవేలుసామి లింగాసామిNo ratings yet
- (1978) - Sharp - Predicting Methods For The Sound Transmission of Building ElementsDocument11 pages(1978) - Sharp - Predicting Methods For The Sound Transmission of Building ElementsNahuel ArmandoNo ratings yet
- Coherent Optical Receiver Basics and DSPDocument10 pagesCoherent Optical Receiver Basics and DSPmehtakedarmNo ratings yet
- Wideband SIR filter with susceptibility testDocument6 pagesWideband SIR filter with susceptibility testViet Anh AnhNo ratings yet
- Coplanar Waveguide-Fed Square Slot Antenna For Broadband Circularly Polarized RadiationDocument4 pagesCoplanar Waveguide-Fed Square Slot Antenna For Broadband Circularly Polarized RadiationmountyzoaNo ratings yet
- Swra 227 DDocument16 pagesSwra 227 DBhaskara Naik SNo ratings yet
- Microstrip AntennasDocument44 pagesMicrostrip AntennasPriyanka PinkyNo ratings yet
- Lecture 8: Digital Modulation II: Chapter 5 - Modulation Techniques For Mobile RadioDocument63 pagesLecture 8: Digital Modulation II: Chapter 5 - Modulation Techniques For Mobile RadiobonfireeNo ratings yet
- Application of The Geometric Theory of DiffractionDocument9 pagesApplication of The Geometric Theory of DiffractionSIA_2No ratings yet
- Double Sideband Suppressed Carrier Telemetry SystemDocument15 pagesDouble Sideband Suppressed Carrier Telemetry SystemWasif AzimNo ratings yet
- Electronically Scanned Array Design: Considerations Common To Passive and Active EsasDocument13 pagesElectronically Scanned Array Design: Considerations Common To Passive and Active EsasSusana RojasNo ratings yet
- BRÜEL & KJAER-Influence of Tripods and Mic ClipsDocument48 pagesBRÜEL & KJAER-Influence of Tripods and Mic ClipsAptaeex Extremadura100% (1)
- Introduction To Synthetic Aperture Sonar: Roy Edgar HansenDocument27 pagesIntroduction To Synthetic Aperture Sonar: Roy Edgar HansenKarelkatNo ratings yet
- Appendix D Link CalculationsDocument5 pagesAppendix D Link CalculationsSuale Sole KaungaNo ratings yet
- Introduction To Synthetic Aperture Sonar PDFDocument27 pagesIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNo ratings yet
- A Broadband Cmos Multiplier-Based Correlator For Ir-Uwb Transceiver SocDocument4 pagesA Broadband Cmos Multiplier-Based Correlator For Ir-Uwb Transceiver SocmiracuNo ratings yet
- Filter Design PDFDocument11 pagesFilter Design PDFarunkr1No ratings yet
- Log-Normal Shadowing Model ExplainedDocument109 pagesLog-Normal Shadowing Model ExplainedNitish313309No ratings yet
- Wireless Transmission and Radio Propagation - Part IIDocument23 pagesWireless Transmission and Radio Propagation - Part IIoma20190106No ratings yet
- Wideband Dual Posts Waveguide Band Pass FilterDocument7 pagesWideband Dual Posts Waveguide Band Pass FilterAmador Garcia IIINo ratings yet
- Of As: Double-Drift-Region (P ' P ') Diode OscillatorsDocument3 pagesOf As: Double-Drift-Region (P ' P ') Diode Oscillatorsanjan_debnathNo ratings yet
- Triple-Band Log-Periodic Dipole Antenna Design for Mobile CommunicationsDocument4 pagesTriple-Band Log-Periodic Dipole Antenna Design for Mobile CommunicationsLuis Ariel EscaleraNo ratings yet
- Compact Ultra-Wideband Bandpass Filter Using Radial-Stub Loaded ResonatorDocument4 pagesCompact Ultra-Wideband Bandpass Filter Using Radial-Stub Loaded ResonatorhosseinNo ratings yet
- Calculation of The Critical Current in Pancake-Coiled High Temperature Superconducting TapesDocument7 pagesCalculation of The Critical Current in Pancake-Coiled High Temperature Superconducting TapesMohamadou BaNo ratings yet
- A Checkerboard Metasurface For Ultra-Wideband Radar Cross Section ReductionDocument4 pagesA Checkerboard Metasurface For Ultra-Wideband Radar Cross Section ReductionUsman QureshiNo ratings yet
- 2G Link Budget DesignDocument5 pages2G Link Budget Designaneesh1982100% (2)
- Microwave Journel DesignDocument5 pagesMicrowave Journel DesignSubburam SrinivasanNo ratings yet
- Performance Very Low Frequency Filters: Design Considerations For HighDocument4 pagesPerformance Very Low Frequency Filters: Design Considerations For Highmvmuthukumar88No ratings yet
- Advanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondFrom EverandAdvanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- Kemenko Maritim - Indonesian Ocean Policy - KKI English Version PDFDocument70 pagesKemenko Maritim - Indonesian Ocean Policy - KKI English Version PDFAryttNo ratings yet
- Beaufort Wind Chart PDFDocument2 pagesBeaufort Wind Chart PDFRachel Erica Guillero BuesingNo ratings yet
- Profil Arus 4 - 250820Document2 pagesProfil Arus 4 - 250820Adam Budi NugrohoNo ratings yet
- Terms and ConditioFnsDocument4 pagesTerms and ConditioFnsAdam Budi NugrohoNo ratings yet
- DPR-7 DesemberDocument3 pagesDPR-7 DesemberAdam Budi NugrohoNo ratings yet
- Profil Arus Laut dari 7-187m DalamDocument2 pagesProfil Arus Laut dari 7-187m DalamAdam Budi NugrohoNo ratings yet
- Modern Submarine Canyon Feeder-System and Deep-Sea Fan Growth in A Tectonically Active Margin (Northern Sicily)Document13 pagesModern Submarine Canyon Feeder-System and Deep-Sea Fan Growth in A Tectonically Active Margin (Northern Sicily)Adam Budi NugrohoNo ratings yet
- Concept of Sedimentary BasinsDocument122 pagesConcept of Sedimentary BasinsAdam Budi NugrohoNo ratings yet
- Profil Arus 3 - 240820Document2 pagesProfil Arus 3 - 240820Adam Budi NugrohoNo ratings yet
- 01 Hydrofest2015-Offshore Survey IntroductionDocument31 pages01 Hydrofest2015-Offshore Survey IntroductionAdam Budi NugrohoNo ratings yet
- Bali-Lombok Gap A Distinct Geo-BiologicDocument4 pagesBali-Lombok Gap A Distinct Geo-BiologicAdam Budi NugrohoNo ratings yet
- Kedalaman 7m - 67m Current Speed: 0,465m/s (0,903kn) Current Direction: 196,5Document2 pagesKedalaman 7m - 67m Current Speed: 0,465m/s (0,903kn) Current Direction: 196,5Adam Budi NugrohoNo ratings yet
- Introduction of Indonesia Tsunami Buoy: KeywordDocument1 pageIntroduction of Indonesia Tsunami Buoy: KeywordAdam Budi NugrohoNo ratings yet
- Wetar PDFDocument36 pagesWetar PDFAdam Budi NugrohoNo ratings yet
- 2007 GC 001577Document7 pages2007 GC 001577Adam Budi NugrohoNo ratings yet
- IND4 Fugro - Hydrographic AcademyDocument25 pagesIND4 Fugro - Hydrographic AcademyAdam Budi NugrohoNo ratings yet
- Ship Particular BJ I 2018Document1 pageShip Particular BJ I 2018Adam Budi NugrohoNo ratings yet
- Talukder 2012Document18 pagesTalukder 2012Adam Budi NugrohoNo ratings yet
- Estimasi Harga BukuDocument1 pageEstimasi Harga BukuAdam Budi NugrohoNo ratings yet
- DredgingDocument36 pagesDredgingTommyVercettiNo ratings yet
- Quick Start Guide for SanDisk SecureAccessDocument21 pagesQuick Start Guide for SanDisk SecureAccessbijan034567No ratings yet
- Tamar 2013 SPWLA Paper FINAL PDFDocument12 pagesTamar 2013 SPWLA Paper FINAL PDFAdam Budi NugrohoNo ratings yet
- Estimasi Harga BukuDocument6 pagesEstimasi Harga BukuAdam Budi NugrohoNo ratings yet
- Zecchin & Catuneanu 2015 MPGDocument16 pagesZecchin & Catuneanu 2015 MPGAdam Budi NugrohoNo ratings yet
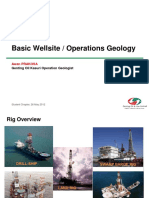
- Wellsite Operations Geology GuideDocument70 pagesWellsite Operations Geology GuideAdam Budi NugrohoNo ratings yet
- Chap01 Introduction To FEDocument43 pagesChap01 Introduction To FEAdam Budi NugrohoNo ratings yet
- Exp-362 Sumatra OpsDocument23 pagesExp-362 Sumatra OpsAdam Budi NugrohoNo ratings yet
- 3 Overburden Rocks Source Maturation PDFDocument22 pages3 Overburden Rocks Source Maturation PDFAdam Budi NugrohoNo ratings yet
- Seismic Attributes - A Promising Aid For Geologic PredictionDocument12 pagesSeismic Attributes - A Promising Aid For Geologic PredictionM Hammad Manzoor100% (1)
- Sonar Introduction 2009 PDFDocument11 pagesSonar Introduction 2009 PDFRaajeswaran BaskaranNo ratings yet
- MBES Survey Systems for Shallow WaterDocument2 pagesMBES Survey Systems for Shallow WaterAlex J. TuiningNo ratings yet
- Echoview Data & Hardware Support: Supported Hardware Other HardwareDocument2 pagesEchoview Data & Hardware Support: Supported Hardware Other HardwareFunda HandasNo ratings yet
- GSS614 - CHAPTER 3 - SoundingDocument44 pagesGSS614 - CHAPTER 3 - SoundingMuhdFikriNo ratings yet
- The Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyDocument10 pagesThe Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyvesmsxNo ratings yet
- R2Sonic Spec Sheet 1.1 A4Document2 pagesR2Sonic Spec Sheet 1.1 A4Muhammad BilalNo ratings yet
- Processing and Analysis of Simrad Multibeam Sonar DataDocument11 pagesProcessing and Analysis of Simrad Multibeam Sonar DataJohn KaruwalNo ratings yet
- Site SurveyingDocument245 pagesSite SurveyingTatenda PaduzeNo ratings yet
- Submarine Mapping Using Multibeam BathymetryDocument5 pagesSubmarine Mapping Using Multibeam BathymetrySil Alba0% (1)
- Multibeam Echosounder Specifications: Standard Features For All R2Sonic MBESDocument2 pagesMultibeam Echosounder Specifications: Standard Features For All R2Sonic MBESArdigautamaAgustaNo ratings yet
- Wassp Handout F3XL A4 4pp WebDocument2 pagesWassp Handout F3XL A4 4pp WebLazy BearNo ratings yet
- Earth Science: Geology, The Environment and The UniverseDocument79 pagesEarth Science: Geology, The Environment and The UniverseAlondra SalgadoNo ratings yet
- The Object Dedection Capabilities of The Bathymetry System - ENDocument84 pagesThe Object Dedection Capabilities of The Bathymetry System - ENutkuNo ratings yet
- Remotesensing 12 04076 v2Document23 pagesRemotesensing 12 04076 v2Matt HoulsonNo ratings yet
- Hysweep®: User's ManualDocument118 pagesHysweep®: User's ManualaliNo ratings yet
- Apache 6 - DS - enDocument4 pagesApache 6 - DS - enBeslin kompasNo ratings yet
- Infycons Profile 17 18Document88 pagesInfycons Profile 17 18Lanu A J IgnatiusNo ratings yet
- Hyspec v1 2 Aug2010Document111 pagesHyspec v1 2 Aug2010Atie AthirahNo ratings yet
- Multibeam Echo SounderDocument2 pagesMultibeam Echo SounderJeline AmanteNo ratings yet
- Hydrographic SurveyingDocument65 pagesHydrographic Surveying205097871% (7)
- 2010odom Slick ES3-M (HiRes)Document2 pages2010odom Slick ES3-M (HiRes)Jeffrey Cuyno MunarNo ratings yet
- Wartsila Brochure - Marine Solutions 2016Document228 pagesWartsila Brochure - Marine Solutions 2016OnceoffpleaseNo ratings yet
- Lecture - 9 Bathymetric SurveyDocument54 pagesLecture - 9 Bathymetric SurveyTharina Nursalika Adhyati100% (2)
- Lakebed Characterization Using Side-Scan Data For PDFDocument85 pagesLakebed Characterization Using Side-Scan Data For PDFguguj348No ratings yet
- Multibeam and ProfilerDocument162 pagesMultibeam and ProfileralsnobNo ratings yet
- GSS614 - CHAPTER 6 - Survey Guidelines and PlanningDocument14 pagesGSS614 - CHAPTER 6 - Survey Guidelines and PlanningMuhdFikriNo ratings yet
- Comparison of Different Methods For Bathymetric Survey and SedimentationDocument16 pagesComparison of Different Methods For Bathymetric Survey and SedimentationCRISTINA QUISPE100% (1)
- Manual Multibeam SonarDocument23 pagesManual Multibeam SonarAyesha MariyaNo ratings yet
- MS For Survey Works (Draft) R6Document44 pagesMS For Survey Works (Draft) R6Tegar Pilar RamadhanNo ratings yet
- SB 1180Document2 pagesSB 1180adrianamasaNo ratings yet