‘Thin Wate Stectes 12 207) 41-65
Contents lists available at ScienceDisect
Thin-Walled Structures
Journal homepage: wwrw.clsevier.com/locateltws
Full length article
Review of API 650 Annex E: Design of large steel welded aboveground
storage tanks excited by seismic loads
Qa
LM. Spritzer, 8. Guzey"
yf Sha f i ning, Par Uey, 550 Wet San Ae, Wat efits NLA
ARTICLE INFO ABSTRACT.
Kort {016503 Aawex E,whih an Ameen Standard for designing aboveground we toage ans subjected
‘Sepang atte iid tone Seismic loads i evened by comparing the design provisions in Aes E wth ote wel iow sign
Seti i eesmens ron the wor, nclaing that of New Zelnd and Japan. evra nit se nich 3
Sta ig ‘dada hp sr, uli, se lt es hci ee and wo iy mechan, shar
psi ay tree tnd overming sr investigated. The design provision fr ech ofthe dvunems were compare or es
fom tk geome an sell paramere forever ferent tank apt at The es show that APO
sah unr cenerative i each ofthe materi ale mechanisms compared to the New Zealand nd
Spans exe phim The mal pry in eis cold ede tet ht he apron Anne
{ofA 60 nortan ii al and al odin hres the New’ Zelan onJpanese dimes
‘onsider nk nd foundation feb. espe some mail diferent, APL 650 Aes Bean become
to adeqtey scent for al tear nie nates wen compared to New Zl a Japanese deen
esments or dein pir
1. Introd ig ink” connected to the tak at it cener f ation. The convetve
Large steel aboveground storage tanks are a common structure used
to contain and store a variety of products such as water, oil, liquefied
natural gas (LNG), and other hazardous chemicals. Its vast array of uses
make its severity to withstand seismie fores essential for the integrity
‘of both the structure's post-event use as well as forthe environment.
During a seismic event, the storage tank is subjected to strong shaking
forces, which can cause the tank to become prone to damage, or in some
‘cases, failure. Such damage could come in the form of the tank shell,
‘yelding or buckling, damage of the roof due to sloshing wave forees,
‘spilling, sliding, and overturning effects. Therefore, it has been of
increasing intrest to study the behavior and effects of large tanks under
seismic accelerations in order to prevent excessive damage to the
structure and to preserve human safety.
Behavior of large steel welded liquid storage tanks excited under
horizontal accelerations have been studied for some time [1-59].
Housner is widely credited as one of the first investigators who created
. useful (00 for modeling large liquid tanks experiencing seismic loads
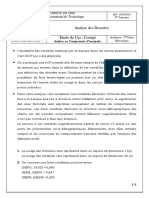
[1-6]. His model, the “spring-mass" analogy, separates the tank liquid
«system into two parts: the impulsive mass and the canvective (sloshing)
mass, The impulsive mass isthe lower portion of the liquid whieh is
‘observed t9 move coincidentally with the tank and is modeled as a
Emo adie uray oped (Gay)
pt on/O3016}. 2016 1.012
‘mass is the upper portion of the liquid and ereates large waves when
accelerated horizontally against the tank wal, and thus, does not move
coincidentally with the structure. The convective mass is modeled as 2
‘mass connected to the tank by a spring with a given stifhess osillating
primarily only in its fundamental mode (Pig. 1). The equivalent
Convective mode horizontal stifiness is related to the convective mode
‘mass and period of vibration. Since there are an infinite number of
possible convective modes, and because the frst (fundamental) mode
represents a majority of the convective mass, only the fundamental
convective mode is typically considered for design purposes. This
approximation has been confirmed by many researchers to be reason:
ably valid (4-9), Due to the fact that the liquid within the tank moves in
two different modes, the period of oscillation for each motion differ.
Impulsive motions tend to have periods between 0.1 and 0.5 s, while
convective periods ean he upwards to 10s or more. By splitting the
complicated system of hydrodynamic forces into two parts, the
components of the system can easly analyzed and combined, ‘This
theory was proposed by Housner in the mid: to late-1900s and is still
currently the primary basis of many worldwide practies. However, a
major drawhack of this model is that is assumes the tanle wall and
foundation are rigid, which is certainly not the case in real-world
applications.
Received 7 Sepeer 206; Res in revel frm 18 November 2016; Asp 19 Novem 2016
(0269:821/ 26 Ever In Al taht ere,
JM Spt, 8. Gey
Alcio RIGID
Fig. 1 Spring Mass Mode ofan aboveground stage tank subjected 16 Brn
celeron,
Many other phenomena have since been studied extensively in order
to prevent the failure of storage tanks subjected to seismic forces. AS
noted above, Housners model assumes a rigid tank structure and
foundation system. Researchers have attempted to quantify the effects
fof a flexible tank structure and foundation system by modifying
Housner® original “spring mass” model (15,16.20,21,29). However,
these approaches have not gained much attention in the American
design standard, API 650, despite evidence of influencing design
assumptions, both positively and negatively. An early study by
Natsiavas showed that the influence of uplift on a storage tank
‘compared to fully anchored tanks inreases the period of motion whieh
‘ean lead to an unconservative buckling analysis if full base anchorage is
assumed (15,16). Malhotra used beam theory to describe the behavior
‘of uplifting tanks on a flexible foundation; 2 method for iteratively
‘analyzing an uplifted tank was created [21]. Axial compressive stresses
resulting from overturning effects were found to decrease for horizon:
tally-excited tanks supported on soil in which the foundation is very
Axle. This was described to occur due tothe inerease in the contact
‘area between the tank base and the soil which results in lower axial
‘compressive stresses. There is an observed inevase uplift deformations
‘and hoop membrane compression stresses that reslt from inereasingly
flexible foundations
Several researchers, amongst which Veletsos and Yang may be on
‘of the most notable, have developed a procedure for analyzing storage
tanks with flexible walls as an analogue to Housners spring-mass model
[4-689]. The method developed by Veletsos and Yang uses the
fundamental natural frequency of the tank, which is a function of
‘depth and density of contained liquid, tank radius, and shell thickness
‘and material (stiffness), to determine the true inertial effect of the
impulsive mode on the tank. The convective mode was proven to
unbiasely infuence the behavior of the tank, and therefore, can be
‘analyzed sing the rigid wall approach. It was observed that the
impulsive mass, on the other hand, could experience much larger
horizontal accelerations due to the flexibility of te wall, leading to
higher hydrodynamic tank stresses. Maheri and co-workers alsa
showed, by examining experimental tests, that the exible response
‘of a storage tank is not equivalent to that ofits rigid counterpart due
part co the added! mass ofthe liquid, and cannot be assumed to behave
similarly (39,40)
Due to its limited presence in design documents, researchers have
developed design tools for conical and combined storage tanks under
hydrostatic and hydrodynamic loads. EL Damatty and co-workers
‘developed a simple design procedure to determine the failure strength
‘of the conial and combined tanks based on finite element models for
hydrostatic and gravity loads (66,67). Several variables such as wall
Imperfections, vertical angle of inclination of the conical tank, tank
‘geometry, and material properties were identified as key elements to
he ae Serene 112 2007) 4-65
the design ofthese tanks (65-69]. EI Damatty and co-workers furthered
this research by examining the capacity of steel conical tanks under
seismic loads (29-52). In their work, they also provide a simple mass
analogue, similar to that of Housner, forthe seismic demand of eonical
storage tanks for the impulsive and convective modes (29). These
studies also incorporate the use of varying tank imperfections that were
found to be critical in previous hydrostatic load studies.
Tn rovent years, there has been increasing trend towards finite
element modeling (FEM) of aboveground storage tanks encompassing
the issues of tank wall and foundation flexibility. Many diferent
methods fr creating a FEM containing complex model properties, such
235 using fluid clement or foundations systems, have been described in
literature [4,26,40,45,47-49,51,52,54,61]. The “added mass method,"
jn which mass is added tothe tan in proportion tothe hydrodynamic
hoop pressure to simulate ud pressures, has Deen ust extensively in
FEM, Buratti and Tavano used the added mass approach to determine
the buckling modes and frequencies of a tank with variable shell
thickness using @ non-linear analysis (54). The FEM analysis also
shovted that diamond shaped buckling fs highly influenced by inelastic
material response. Some studies have looked at the response of sol:
structure interaction by analyzing structures on soil stifiness corre
sponding to soil types classified aecording to API 650 or ASCE 7-10
[55,60], Moreover, the response of uplifing storage tanks on flexible
foundations has been studied and compared to that of uplifting tanks on
rigid foundations (15,19,21,23,26,47,48,51), The influence ofthe root
stilfaess (in comparison to opentop tanks) has also drawn some
tention as it has been founel to drastically change the behavior on
the dynamic response ofthe tank by constraining radial deformations
Virela and co-workers shoved that the natural periad response of 2
tank with a roof is dependent on the type of roof, and that in fact,
‘modes dominated by roof modes were unaffected by the aspect ratio of
the tank [44]. Amiel and Sabbagh-Yazdi developed a simple parameter
Which measures the influence of the roof on the natural frequency of
the tank [41
Aside from its numerous limitations, Housner's mass analogue
model is very useful to represent the inertial and sloshing effects of
the liquid ina storage tank during aseismic event. This model ean then
be used to design the storage tank accordingly by accounting for the
several failure types that can occur during such an event.
hoop stresses occur due tothe liquid inertial forees acting
on the tank shell during horizontal accelerations (7
11,17,18,28,39,55-57]. Dynamic hoop stresses are a combination of
Impulsive and convective fiuid forces, The flexibility of the rank
foundation connection as well as the flexibility of the tank wall have
a large effect onthe hydrodynamic stresses generated on the shel wal
Dynamic hoop stresses can cause disorientation of the shell geometry
(Canks without ros), leading to shell deformations, and therefore, can
fuse premature yielding of the tank shell. Shell deformation can
Increase stresses at locations where the radis has deformed, and in
tum, the tank shells prone to failure in future events.
Elastic plastic buckling often referred to as elephant’ foot buckling,
fs a result of both internal hydrodynamic or hydrostatic pressure and
vertical stresses in the shell. More specifically, t occurs when the tank
shell is uplifted and rotated about its center dusing seismic shaking,
causing vertical compression forces (Fig. 2) [2-17,37-39,42,40,53-571.
Elephants foot buckling Is likely co occur at high tensile hoop stresses
combined with vertical compressive forces. Thus, elephant foot buck
ing is observed near or at the base of the tank shell, where
hhydsodynamic and hydrostatie pressures and axial compressive stresses
are at a maximum. Vertical ground accelerations are also believed to
Increase the likelihood of this type of buckling. Another buckling
mechanism of importance is diamond-shaped buckling
[11,14,17,18,56,57). While the cause of the failure is the same as
elephants foot buckling where vertical forees combine with internal
hhydrostatic forces, diamond-shaped buckling tends to occur near the
middle or top of the tank shell. This is because diamond shaped
JM Spt, 8. Gey
buckling is a consequence of membrane buckling in thin shells, which
‘are common for top shell courses in a tank design where hydrostatic
forces are not as high. Ici also possible that diamond-shape buekling is
‘a result of wall lxibility as it has been discussed in literature that
flexibility causes the much higher hydrodynamic hoop pressures
towards the top or middle of the shel, especially tall and slender
tanks. Diamondshape buckling tends to result from higher axial
stresses compared to the axial stresses resulting in elephants foot
buckling
‘Another effect of overturning isthe uplift resulting from the tank
rotation [4,6,15-17,95). Fig. 2 shows the uplift occurring on the
‘opposite side of the elephant foot buckle which denotes an equal and
‘opposite reaction to the buckling mechanism. Uplift causes bending
streses in the base plate which can result in yielding or plastic
deformation. The uplift can also cause deformations atthe shell wall:
base plate connection which ean result in cracks atthe tank base; such
‘racks can lead to leaking of the tank contents. Tank uplift can be
limited by anchoring the tank to the foundation. Tanks that are not
‘mechanically anchored are prone to uplifting displacements, and there-
fore, uplift forces must be considered in tank design for seismic
‘accelerations, However, by providing a rigid connection to the founda
tion by means of anchoring, the resultant axial compressive forces in
the shell wall ean increase dramatically. Therefore, aside from econom-
ical and other reasons, iis generally preferable to not anchor a tank for
uplifting purposes, i posible. Non-mechanically anchored tanks were
the primary focus for this study.
Sloshing waves are a direct result of the horizontal acceleration of,
the convective mass, Since the convective mass motion is limited by the
‘confines of the tank shel, the momentum of the liqu! under horizontal
accelerations is forced to move vertically along the tank wall. This
‘causes upward forces onthe roof and supporting members ofthe roof.
‘The long-period dynamic forces due to the convective wave motion
have the ability to damage the roof and cause spilling of the tank
‘contents, Therefore, itis often desirable in a tank design to provide
adequate freeboard, Freeboard. is a specific amount of shell height
‘above the maximum design liquid height that can accommodate
convective wave heights. However, providing too much freeboard can
be costly. Malhotra [25] has developed a useful method for incoxporat
ing an inerease in pressure on the roof when inadequate freeboard is
Intentionally provided.
Its apparent that seismic accelerations have the ability to severely
‘damage large storage tanks in many different forms. Therefore, in order
to minimize and prevent these issues, the American Petroleum Institute
(APD, has developed a design standard for seismic loads: Annex E
Seismic Design of Storage Tanks of API 650 [55]. Annex Ef API 650 is
4 result of extensive previous investigations, experience, and forms
lated theory; Wozniak and Mitchell are credited as the frst individuals
who developed Housner’sspring-mass approach fr rig tank walls and
he ae Serene 112 2007) 4-65
foundation into the American design standard, API 650 Annex E (10)
API 650 is based on Allowable Suess Design (ASD) despite the wie-
spread transition to Load and Resistance Factor Design (LRFD) in the
US, While this is the primary design document within the United States,
itis also widely used internationally.
Many other design documents are available for nations outside the
United States for large steel tanks. Two of these include, “Seismic
Design of Storage Tanks: 2009" developed by the New Zealand Society
for Earthquake Engineering (NZSEE) (56) and the Japanese document,
“Design Recommendations for Storage Tanks and their Supports with
Emphasis on Seismic Design (2010 Edition)” (57). Both of these
documents are working stress based. The NZSEE document, often
referred to as the “Red Book,” is a modified and updated version of
the original document produced in 1986, the "Blue Book” [1]. It
should be noted that the NZSEE document has not yet been recognized
by the mation of New Zealand as a standard of practice, but isin the
process of doing so. Nonetheless, the New Zealand document is still
Widely used for the design of aboveground storage tanks in New
Zealand and is considered reliable.
Annex E of API 650 (Edition 12), the 2009 NZSEE, and the 2010
Japanese documents all consider the major material limit tates in their
‘own way: hydrodynamic hoop stress, buckling stress, ase plate stresses
and uplift, and sloshing wave height and forces. Moreover, all of these
documents design against stability ~ sliding and overturning. Each
document contains a unique design philosophy with similar design limit
states, which makes a comparison amongst each other possible. More
Importantly, their similarities allow for API 650 to be studied system:
tically in order to identify possible areas of improvement or additions
with reference to other design documents
Some studies have been conducted which compare several of the
design limit states amongst some of the desig guides (13,17-19]. The
present study eoviews Annex B of API 650. In partieular, the adequacy
for the design of large steel tanks within the United States in terms ofits
ability to prevent catastrophe and to avoid excessive overdesign aswell
asthe overall completeness of limit states of storage tanks under seismic
excitation are examined. A comparison ofthe API 650 design specifica
{don is made with other prominent international provisions, suchas the
NZSEE document, “Seismic Design of Storage Tanks: 2008," and the
Japanese recommendation, “Design Recommendation for Storage
‘Tanks and Their Supports with Emphasis on Seismic Design” (2010
Edition)
2. Tank design
‘A tank design must frst be completed using static analysis before
evaluating and designing a tank to withstand seismic loads. Many
diferent tank configurations were chosen in order to encompass a wide
range of rests. These configurations were characterized by thet ratio
of height to radius, commonly referred to asthe aspect ratio, Low and
high aspect ratios correspond to broad and slender tanks, respectively
Broad and slender tanks behave indifferent manners and, therefore,
should be expected 10 have different limiting design criteria, For
example, a tank with a large radius contains more liquid per foot of
elevation than small radius tank, and therefore, would be expected to
produce higher total inertial forces on the shell wall compared toa tank
With identical height and smaller radius. In this sense, impulsive mass
contributions increase with an increase in tank radius while maintain
ing a constant depth of liquid. Broad tanks, in general, generate larger
free surface waves, and therefore have higher convective mass propor-
tions compared to tall slender tanks. Fr high aspect ratios stability an
control the design, where overturning and uplift of unanchored tanks i
of great concer, while material limits are sil eitical
“Three typical tank heights were chosen based on their use in
Industry: 40. (12.2 m), 48 (14.6 m), and 56. (17-1 m). All shell
courses were assumed to bea constant height of 8 ft. Several tank radi
were selected: 25 ft (7.6 m), 50 (15.2 m), 75 fe (22.9 m), and 100 f
JM Spt, 8. Gey
(20.5 m), Each tank height was paired with the chosen the tank radi,
siving a combination of 12 different configurations, with aspect ratios
ranging from 0.40 to 2.24. Asa reference, aspeet ratios of 0.5, 1.0, and
2.0 were also selected for one tank height of 404, giving a 15 total
different tank configurations
Each of the tanks were designed according to Chapter 5 of APL 650.
“The tanks were assumed to contain a liquid with specific gravity equal
4 0.9 and were assumed to be sel anchored on a ringwall foundation.
‘The 1-Foot Method and Variable-Design-Point Method were both used:
the more economical set of shell thicknesses from the two methods wat
selected as the final design thickness. In most eases, this was the
‘Variable Design-Point Method. Inthe event where the Foot Method or
Variable-Design-Point Method required a shell thickness less than the
minimim specified thickness in API 650, the minimum thickness was
‘used; the minimum shel thickness was specified in accordance with APL
‘650 paragraph $6.1. It should be noted that APL 650 specifies thatthe
bottom shell course be greater than or equal to the thickness of the
base. One issue occurred forthe tank with dimensions 40 ft (12.2 m)
height by 204 (6.1 m) radius, sehere all of the shell courses could be
designed sufficiently for state forces using the minimum design
thickness, which was 0.1875 in. (4.8 mm). However, the base thickness
was required to be at least 0.250 in, (6.4 mm), Therefore, the design
thickness of the bottom shell course was increased 0.250 in. (6.4 mm)
to accommodate the provision for having a bottom shell course great
than or equal to that of the base plate. This issue appeared for this
‘geometry only
ASTM ASI6 Grade 70 steel was assumed for each shell design,
which has a yield stress, F,, of 38,000 pounds per square inch (p
(262.MP=a), an ultimate tensile strength of 70,000 pst (483 MPa), an
allowable stress for design, Sq, of 25,300 psi (174 MPa), and an
allowable stress for hydrotes,S, of 28,500 psi (197 MPa). No corrosion
‘allowance was used. Furthermore, the base and roof thicknesses were
both designed according to API 650 Paragraphs 5.4 and 5.10, respec
tively, using ASTM A36 stecl with a yield stress of 36,000 psi
(248 MPa), The roof was assumed to be a supported-cone roof with
rafters spaced at 84 in. (2-1 m) on center. The rafter design was not
Te 4615)
A555 613)
NZSEE CAT) = CODM/n.5, oa
NZSEE. CUT) = GcHZRNCT, D) os)
NZSEE Gh) = CUM, an
NZSEE CUFj=0. 7G )2RMI D) ex)
BNC 2
JM Spt, 8. Gey ‘in Wa Serene 112 2007) 4-65
vere’
Convective design response spectrum acceleration parameter, 9g
Impulsive design response spectrum acceleration parameter, ig,
Vertical seismic acceleration parameter, %¢
‘Ordinate of the elastic ste hazard spectrum for horizontal loading forthe site subsoil type and relevant mode
‘Vertical design ction coefficient for first vertical (breathing) mode of vibration including seale factor of 0.7,
Horizontal design action coefficient for mode including correction factor to account for ductility and level of damping
lastic site hazard spectrum coefficient for vertical mode from NZS 1170.5:2004
nastic site hazard spectrum coefficient for mode i ftom NZS 1170.5:2004
Structural characteristic coefficient
‘Acceeration-basod site coefficient at 0.2 period
‘Velocity-based site coefficient at 1.05 period
Acceleration due to gravity (ft/s)
Importance Factor
(Correction factor for NZS 1170.5 clastic site hazard spectrum to aecount for ductility level and level of damping
Coefficient 10 adjust the spectral acceleration from 5-0.5% damping, equal to 1.5
[Neat fault zone hazard factor from NZS 1170.5
Scaling factor from MCE level to design level, equal to 2/2
Return period faetor forthe ultimate limit state fom NZS 1170 with tank importance level
Force reduction factor for convective mode
Force reduction factor for impulsive mode
‘Mapped, maximum considered earthquake, 5M damped, spectral response parameter ata period of zero seconds, equals 0.4°S), 98
‘Mapped, maximum considered earthquake, $% damped, spectral response acceleration parameter at a period of one second, %g
‘Acceleration response atthe first natural period (fv)
‘The design, 59% damped, spectral response acceleration parameter ata one second periods, og
‘The design, 59% damped, spectral response acceleration parameter at short periods (T ~ 0.2), 9g
Design level peak ground acceleration parameter for sites not addressed by ASCE methods (API)
Structural performance factor, equal to 1.0 (NZSEE)
‘Mapped, maximum considered earthquake, 54% damped, spectral response parameter at short periods (T = 0.29), Yog
Period of vibration of first vertical (breathing) mode of vibration ineluding soil-tructure interaction, §
[Natural period ofthe convective mode of behavior ofthe liquid, «
Regional-dependent transition period for longer ground motion, equal to 4 outside the US.,s
FS ES)
Seismic zone factor from NZS 1170.5
Seismic zoning factor
Damping level appropriate 10 mode of response
DDuetlity factor: equals 2.0 for limited ductile behavior for impulsive mode; equals 1.25 for non-luctile mechanism for impulsive mode;
equals 1.0 for convective and vertical modes
Appendix ¢. Equations for effective weights and moment arms for impulsive and convective masses
251.333
eon)
b\y, 2
00.2182), Pe. a33
ea een
oben s.<0!),
nl eo
APL Xia0. 75H, B21. 338 Preerey
@o1212)
7 Ohtsned fom AP 650, RISE: Seki Ds of Sore Tank: 2009, sed Desig Recommends or Storage Tsk ad th Support with phason Simic Design 2010
aon.
JM Spt, 8. Gey he ae Serene 112 2007) 4-65
amt x,
61219)
ASH Assumed
X= HELO fe Assume
whore
D Diameter of tank, f
i Design gu ev,
We Erfotve convective weight Ib
Ww otic impulsive weight IBF
w, Total product weight, Ib
x Moment arm for convective mass,
x Moment arm forthe impulsive mass, f
x Moment arm for root mass, fe
x Moment arm fr shell mas, f
[Appendix D. Equations for periods of vibration forthe impulsive, convective, and vertical modes
Impulsive Periods
an pe EE
an easaab)
a, RT
NOSE Tae / REGEN (cos)
ae (cx30 vet)
NISEE Ke= Gh sGie a
an an
—e (C3.31 Def.)
WN n= {74h 7.2.19)
py SE 7.220)
IPNI=O. wwo( 2) ~0, af }oo 46
a) 4p (7.2.20 bef)
ae FE
BPN Tate PR (72.18)
sary
BN = ain
IPN k= Mee [ES 2
wee
721s)
Convective Periods:
(452%)
JM Spt, 8. Gey ‘in Wa Serene 112 2007) 4-65
2
WN p=
Poaufect) 7.2.9)
Vertical “Breathing” Perio:
ease ee (E452)
where,
* Dimensionless horizontal translational sifines factor that convert the static stifiness ro dynamic stifiness
a Dimensionless rockin sifses factor that convert the state stifess to dynamic stifness
G Coefficient for determining impalsve period of tank system (Fg, B.1 of API 650)
D Diameter of ank,f
z ‘Young's modulus of stet, psf, equals 4.210" pat
ie Yield stress of stel, pf, equals 5.5°10® psf
8 Acceleration du to gravity, 4/5, equals 32.2 fus"
G Shear modulus of sol pst 2.6°10® pst for assumed sol condition
8 Design liquid level,
ky Equivalent sifness of unit circumferential length for upiting resistance, psf
kK Equivalent stiffness of the one degre of freedom tank system in the horizontal direction, pst
& Sloshing period eoetficient, sf
is ‘etial period coefficient (defined in Figure €3.23 of N2SEE)
K Horizontal translational stiffness factor of the foundation, I/F
Ky Rocking stiffness ofthe foundation, Ibe
w Yielding force of the base plat, pst
Re Radius of foundation, f¢
ba “Thickness of tank shel ata eight of H/3,
th Natural period of the tank, s
T. Modified natural period of the tank considering deformation ofboth the tak shell and base plat,
« “Thickness of base pate, t
% Fundamental natural peciod, 8
1 Impulsive period of vibration, s
™ Convective (sloshing) period of vibration, s
& Equivalent uniform thickness of tank shell, in
v, Shear wave velocity, fis, equals 800 ft/s for assumed sil condition
Ww Efectve convective weight, Ibf
Ww, Efcctve impulsive weight, Ibf
W ‘Weight ofthe base plate, Ibf
ww, “otal produet weight, Ir
w Weight ofthe roof and supporting rot structure, Ibf
w Weight ofthe tank shell, Ibf
x Moment arm for impulsive mass, fc
is Base plate displacement due to uplift ft
® ith postive root ofthe Bessel function ofthe first kind, ex = 1.841
x ‘Tank geometry coeficient
m ith postive root ofthe Bessel function ofthe frst kind, 2x = 1.841
P Fld density, IBF, equals 56.2 Ib
% Poisson's rato of sll, 0.33 for assumed sil condition
Appendix E. Equations for base shear and overturning moment
ave \Wr¥ 61)
APL Y= ACW 4 HE +H) 61.2)
APL Y= AW, 619)
JM Spt, 8. Gey
——
he ae Serene 112 2007) 4-65
APL May = VIAL, + WX, + WDE TALON (6.15.1)
where,
A Convective design response spectrum acceleration parameter, %g
A, Impulsive design response spectrum acceleration parameter, 9
Moe Ringwall moment — portion of the total overturning moment that ats at the base ofthe tank shell perimeter, Ibe
we Effective conveetive weight, IDF
wi Effective impulsive weight, Ibt
We Weight of the base plate, IDF
we Weight of the oof and supporting roof structure, bf
Ww Weight of the tank shell, Ibt
v Total base shear, bf
ve Design base shear due tothe convective component from of the effective slashing weight, Ibf
v Design base shear due tothe impulsive component from effective weight of tank and contents, Ibf
x ‘Moment arm for convective mass, f
% ‘Moment arm for the impulsive mas, fe
x ‘Moment arm for roof mass, ft
x Moment arm for shell mass, ft
Appendix F. Equations for dynamic hoop stress
Dynamie Hoop Stress
APN swoon o{?) foto wia2) Baas
GG wi} i
y jlo
of) | Per.ass, v<0.780
(6 a) | a
ana rae]
APL Net
APL N=
pees
oR
394,00", Bet. 383,7>0.75D
=<
APL Ny? 604-106
NZSEE y= Ng + N= Nyt
INZSEE Ny = NegRolt
NZSEE N20. 837% RETR
NZSEE Ny
Yn AsOCAT IPR
NZSEE Ni, = NyC3(T)
NZSEE 4,
BPN gy
TPN Qa, = 1D,
INP,
Tl
Allowable Dynamic Hoop Stress:
6.146)
(e614)
eo1.420)
(@6..4-30)
6.1440)
09.6.1)
(a0)
as
ao
an
as
(40)
732)
oan
oo)
JM Spt, 8. Gey ‘in Wa Serene 112 2007) 4-65
APL gy@0.98, < 45, 624)
NZSEE fous (42)
WN 0-6 7.10)
where,
A Convective design response spectrum acceleration parameter, ig
A Impulsive design response spectrum acceleration parameter, Sg
A Vertical seismic acceleration parameter,
{Ci(T,) Vertical design action coefficient for first vertical (breathing) mode of vibration including stale factor of 07
C\(T.) Horizontal design action coefficient for convective mode including correction factor to account for ductility and level of damping
\(1)) Horizontal design action coefficient for impulsive mode including correction factor to account for ductility and level of damping
D Diameter of tank, f
>, Structural characteristic coefficient
E ‘Young's modulus of ste, psi, equals 29°10® psi
fy ‘Total combined hoop stress in the shell, psi
fos ‘Maximum allowable dynamic hoop strese, pst
5 Yield stress of stee, psi, equals 38°10" psi
8 ‘Acceleration due to gravity, fs, equals 32.2.5?
G Specific gravity of the liquid, equals 0.9
h Damping ratio, %, equals 5% for impulsive mode and 0.5% for convective mode
H Design liquid level, fe
r Importance Factor
N Convective hydrodynamic hoop forces, Ibf/in
™ Hydrostatic hoop frees, Ibf/in
n Impulsive hydrodynamic hoop forces, Ib/in
No ‘Total hydrodynamic hoop force, Ibt/ia
Now Convective hydrodynamic hoop forces, Ibf/in
Nom Hydrostatic hoop forees,Ibf/in
No Impulsive hydrodynamic hoop forces, Ibt/in
Now Hydrodynamic hoop force due to vertical component, Ibf/in
None Convective non-dimensionalized hoop stress coefficient
Nou ydrostaie non-dimensionalized hoop stress coeficent
Nim Impulsive non-dimensionalized hoop stress coefficient
Ny ‘Total combined hoop force in the shell, Ibf/in
Oe Design shear force of the impulsive mass vibration, Ibt
Allowable hydrodynamic hoop stres, psi
(0) Dimensionless impulsive pressure at tank base coefficient, given in Figure C3.3 of NZSEE
R Radius of tank,
Su Acceleration response atthe first natural period ($4)
sy Allowable stress for design, psi, equals 25.3°10" psi
t ‘Thickness ofthe shell course under consideration, in
1 Natural period ofthe tank, s
T “Mogified natural period ofthe tank considering deformation of both the tank shell and base plate, s
w, Effective impulsive weight, Ibf
Wy, ‘Total product weight, Ibf
y Distance from liquid surface to any point, fe
y Yield ratio of yield stress to wtimate tensile stress of annular plate
im Seismie zoning factor
e Fluid density, IBA, equals 56.2 Ibf/A°
On Allowable hydrodynamic hoop stress, psi
or ‘Total combined hoop stress in the shell, psi
% Produet hydrostatic hoop stress in shell
fy Hoop stres in shell de to impulsive and convective forces of the stored liquid, pst
2yj__Design hoop stress atthe bottom course of tank wall, psi
JM Spt, 8. Gey
Appendix G. Equations for uplift and base plate stress
he ae Serene 112 2007) 4-65
pi
Oe ee (sai.
APL * (621112)
e211
66
129
(02s)
Nese, =
Es, (C424)
nase E= (rae ness
NUSEE 1-289) (c4.25 vet
vaser -(2:- 3)
: cay
Atowabe Uli iis
An aise een
Naste 5 6
NaseE 40.20 ca
base Pate Sess:
ese
eS (C424),
Nasee E (eras nes)
an
yeas
oa
WS ne, ras
{ogy om)
Allowaie Hae at Sess
NUSEE fy 2 6
eset tsi per)
ora
«on
3
aso
a (Quality indicator for tank construction, equals L
Vertical seismie acceleration parameter, i
Vertical design ation cocicient for frst vertical (breathing) mode of vibration including scale factor of 0.7
n action coefficient for convective mode including correction factor to account for ductility and level of damping
Diameter of tank, f
Structural characteristic coefficient
Young's modulus of steel, psi equals 29°10° pst
Membrane compression buckling stress fr tank with internal pressure, subjected to uniform compression, psi
Allowable buckling stress for elephant’ fot buckling, psi
axiom axial stress, pst
Allowable buckling stress for diamond-shaped buckling, psi
Allowable buckling stress, pst
Longitudinal membrane compression stress, psi
Allowable seismic bending strss exclusive of internal pressure, psi
Basic value for determining strength of elephant foot bulge, ps
Maximum compression buckling tess, psi
“Membrane compression bueklingstres for tank without internal pressure, subjected to uniform compression, psi
‘Yield stress of steel, psi, equals 38°10" psi
Acceleration due to gravity, fs, equals 32.2 fs
JM Spt, 8. Gey ‘in Wa Serene 112 2007) 4-65
Specific gravity of the liquid, equals 0
Damping ratio, %, equals 5% for impulsive mode and 0.5% for convective mode
Design liquid level, fe
Importance Factor
Ringwall moment - portion ofthe total overturning moment that acts atthe base ofthe tank shell perimeter, Ibfft
Worst ease pressure for elephant’ foot or diamond-shaped buckling, psi
Convective effective pressure at the base ofthe tank, psi
Hydrostatic pressure atthe base ofthe tank, psi
Impulsive effective presure atthe base of the tank, psi
Vertical effective pressure atthe base of the tank, psi
Pressure to compression ratio
Dimensionless convective pressure at clevation z, given in Figure C24 of NZSEE
Peak value of dimensionless impulsive pressure at tank base, given in Figure C3.3 of NZSEE,
Design shear force using convective mode, psi
Maximum buckling stress in shell wall, psi
Allowable base plate stress, psi
‘Allowable elephants buckling stress, psi
Radius of tank,
‘Acceleration response atthe first natural period, (1/8)
Allowable stress for design, psi, equals 25.3°10" psi
Natural period ofthe tank, $
“Modified natural period of the tank considering deformation of both the tank shell and base plat, s
“Thickness of shel ll, in
Caleulated uplif, in (NZSEE)
Force resisting uplift in annular region, Ibe
Efetive convective weight, Ibf
Effetive impulsive weight, Ibf
Calculated design uplift due to product pressure per unit circumferential length, Ibf/ft
Weight of the roof supported by the shell, bf, assumed to be 60% ofthe roof and supporting roof structure weight
Weight of the shel, bt
‘Tank and roof weight acting at base of shell Ibf/e
Elevation above ground under consideration, ft
Section modulus for the tank shel, f°
Seismic zoning factor
Imperfection ratio
Ratio of yield stress to buckling stress due fo inital imperfections
Fluid density, Ib, equals 56.2 1b(/t?
Maximum longitudinal shell compression stress, psi
Axial membrane stress in sell wall due to shell and roof weight, pst
‘Axial membrane stress in shell wall due to overturning, psi
Suess modification due to imperfection in shell wall,
Membrane compression factor, equals 1.24
Appendix 1. Equations for freeboard
APL 40.4204, e720)
KSyl p=? SKOFSIE. Tests 722)
Tk=2, SKOESY TL, Tots
APL Ay = Spl Th=2. SKORSY™, Tt 723)
NZSEE dg = Ry. BEATE + 10. 1G (330)
JPN =, 802715, Teanb. 62%) on
JPN. $y=6.6, 1.286
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Lecon 8 Contrat de PhaseDocument5 pagesLecon 8 Contrat de PhaseYasmine Hammami100% (2)
- DESSIN TECHNIQUE Cours Et Exercices Avec Solutions WWW Cours-Electromecanique ComDocument276 pagesDESSIN TECHNIQUE Cours Et Exercices Avec Solutions WWW Cours-Electromecanique ComYasmine HammamiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Leçon 6 Elaboration D'un Avant Projet de GammeDocument11 pagesLeçon 6 Elaboration D'un Avant Projet de GammeYasmine HammamiNo ratings yet
- Etude de CasDocument8 pagesEtude de CasYasmine HammamiNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Le Projet Personnel Et ProfessionnelDocument25 pagesLe Projet Personnel Et ProfessionnelYasmine Hammami100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5808)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Modélisation D'une Pièce-Yasmine-Modèle 2D Axisymétrie-1Document10 pagesModélisation D'une Pièce-Yasmine-Modèle 2D Axisymétrie-1Yasmine HammamiNo ratings yet
- Modélisation D'une Pièce-Yasmine-Modéle 3D-1Document10 pagesModélisation D'une Pièce-Yasmine-Modéle 3D-1Yasmine HammamiNo ratings yet
- PR Api 650 en DemoDocument10 pagesPR Api 650 en DemoYasmine HammamiNo ratings yet
- Ap0288 21 05 Ds 004-Feuilles de Donnees Reservoir de Stockage Eau Anti-IncendieDocument2 pagesAp0288 21 05 Ds 004-Feuilles de Donnees Reservoir de Stockage Eau Anti-IncendieYasmine HammamiNo ratings yet
- Acp Sur SpssDocument4 pagesAcp Sur SpssYasmine Hammami100% (1)
- SITESDocument1 pageSITESYasmine HammamiNo ratings yet
- Table of ContentDocument2 pagesTable of ContentYasmine HammamiNo ratings yet
- Api 650 PresentaciónDocument18 pagesApi 650 PresentaciónYasmine HammamiNo ratings yet
- Preview: Liquid Storage Tanks Internal and External Pressure Studies: Yielding and Buckling Failure ModesDocument24 pagesPreview: Liquid Storage Tanks Internal and External Pressure Studies: Yielding and Buckling Failure ModesYasmine HammamiNo ratings yet
- Résumé ACPDocument1 pageRésumé ACPYasmine HammamiNo ratings yet
- Etude de Cas - CorrigéDocument5 pagesEtude de Cas - CorrigéYasmine HammamiNo ratings yet
- Construction Industrielle Dessin Technique Calcul MecaniqueDocument257 pagesConstruction Industrielle Dessin Technique Calcul MecaniqueYasmine HammamiNo ratings yet
- Analyse Des Données Analyse Des Données: Chapitre II: Analyse en Composantes Principales (ACP)Document23 pagesAnalyse Des Données Analyse Des Données: Chapitre II: Analyse en Composantes Principales (ACP)Yasmine HammamiNo ratings yet
- ThermocoupleDocument8 pagesThermocoupleYasmine HammamiNo ratings yet
- Lettre Motivation Ingenieur MecaniqueDocument2 pagesLettre Motivation Ingenieur MecaniqueYasmine HammamiNo ratings yet
- Atelier TournageDocument4 pagesAtelier TournageYasmine HammamiNo ratings yet
- Feuilletage 437Document23 pagesFeuilletage 437Yasmine HammamiNo ratings yet
- ProjetDocument14 pagesProjetYasmine HammamiNo ratings yet