You might also like
- CAM GTU Study Material E-Notes Unit-6 08052021103558AMDocument29 pagesCAM GTU Study Material E-Notes Unit-6 08052021103558AMparth bhardwajNo ratings yet
- Industry-4-0 GTU Study Material E-Notes Unit-4 25042021123702PMDocument14 pagesIndustry-4-0 GTU Study Material E-Notes Unit-4 25042021123702PMparth bhardwajNo ratings yet
- Parliamentary Committees in India: - Ayushi Rai (PPG) - Sujata Bahot (PPG) - Trina Das (DS)Document18 pagesParliamentary Committees in India: - Ayushi Rai (PPG) - Sujata Bahot (PPG) - Trina Das (DS)parth bhardwajNo ratings yet
- Parliamentary Committees in IndiaDocument17 pagesParliamentary Committees in Indiaparth bhardwajNo ratings yet
- Analog-Digital Converters: By: Saumya Ranjan BehuraDocument62 pagesAnalog-Digital Converters: By: Saumya Ranjan Behuraparth bhardwajNo ratings yet
- Chapter: 4 Introduction To Pneumatic Systems and Components: TopicsDocument4 pagesChapter: 4 Introduction To Pneumatic Systems and Components: Topicsparth bhardwajNo ratings yet
- EME Lab Planning - RefDocument1 pageEME Lab Planning - Refparth bhardwajNo ratings yet
- Chapter: 6 Electro Hydraulic and Electro-Pneumatic: TopicsDocument3 pagesChapter: 6 Electro Hydraulic and Electro-Pneumatic: Topicsparth bhardwajNo ratings yet
- Chapter: 5 Design of Pneumatic Circuits: TopicsDocument3 pagesChapter: 5 Design of Pneumatic Circuits: Topicsparth bhardwajNo ratings yet
- Oil Hydraulics and Pneumatics: Mr. Haresh Devjani and Mr. Parth GaudDocument9 pagesOil Hydraulics and Pneumatics: Mr. Haresh Devjani and Mr. Parth Gaudparth bhardwajNo ratings yet
- Analog To Digital ConverterDocument14 pagesAnalog To Digital Converterparth bhardwajNo ratings yet
- Variablefrequencydrives 130331093849 Phpapp02 PDFDocument26 pagesVariablefrequencydrives 130331093849 Phpapp02 PDFparth bhardwajNo ratings yet
- M. Nageswar Rao, SR - Mgr. (EMD) Date: 01.10.2015Document24 pagesM. Nageswar Rao, SR - Mgr. (EMD) Date: 01.10.2015parth bhardwajNo ratings yet
- VFD 190812183933Document7 pagesVFD 190812183933parth bhardwajNo ratings yet
- Matlab Programming For Numerical Computation - Unit 4 - Module 2 - Errors and ApproximationsDocument6 pagesMatlab Programming For Numerical Computation - Unit 4 - Module 2 - Errors and Approximationsparth bhardwajNo ratings yet
- Presented BY:-Pratik Gupta (Eee 7 Sem)Document26 pagesPresented BY:-Pratik Gupta (Eee 7 Sem)parth bhardwajNo ratings yet
- MCQS On CEDocument24 pagesMCQS On CEparth bhardwajNo ratings yet
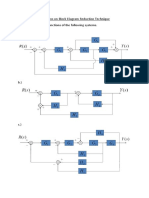
- Questions On Block Diagram Reduction TechniqueDocument2 pagesQuestions On Block Diagram Reduction Techniqueparth bhardwajNo ratings yet
- Questions On Time Response AnalysisDocument1 pageQuestions On Time Response Analysisparth bhardwajNo ratings yet
- Questions On Mechanical-Electrical AnalogyDocument2 pagesQuestions On Mechanical-Electrical Analogyparth bhardwaj100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cel 2103 - WP Task 3 - Body Paragraph Draft 1-191476 AbdulrahmanDocument4 pagesCel 2103 - WP Task 3 - Body Paragraph Draft 1-191476 AbdulrahmanMohammad BappyNo ratings yet
- FTI Trends 2020 PDFDocument366 pagesFTI Trends 2020 PDFJosé Rafael Giraldo Tenorio100% (2)
- LB AW SiX SPT - ENDocument58 pagesLB AW SiX SPT - ENalireza ghaderiNo ratings yet
- FANUC Robot M-16iDocument14 pagesFANUC Robot M-16iFrancisco RojasNo ratings yet
- Farooq ResumeDocument3 pagesFarooq ResumeAbdul WadoodNo ratings yet
- C5G Tech Specs en PDFDocument65 pagesC5G Tech Specs en PDFAymen ZammaliNo ratings yet
- Explicit Instruction - SyllablesDocument20 pagesExplicit Instruction - Syllablesapi-217065852No ratings yet
- Path Tracking and Obstacle Avoidance For A Miniature Robot: by Martin LundgrenDocument51 pagesPath Tracking and Obstacle Avoidance For A Miniature Robot: by Martin LundgrenNiamat KhanNo ratings yet
- If Computers Take Over Many of Our TasksDocument8 pagesIf Computers Take Over Many of Our TasksNimeshAgarwalNo ratings yet
- OIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)Document10 pagesOIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)MICHEL RAJ0% (1)
- X1 Delivery RobotDocument2 pagesX1 Delivery RobotPoPo PoonNo ratings yet
- Arup - Rethinking The FactoryDocument60 pagesArup - Rethinking The Factoryivo100% (1)
- Robot Navigation With Anisotropic Magneto Resistive Amr Sensors PDFDocument8 pagesRobot Navigation With Anisotropic Magneto Resistive Amr Sensors PDFPhạm Xuân HoàngNo ratings yet
- PresentationDocument41 pagesPresentationWanasinghe Arachchige Thumeera RuwansiriNo ratings yet
- Emedia Robotic Educ 231219Document44 pagesEmedia Robotic Educ 231219Iep_Jem_6994No ratings yet
- Product Specification IRB 660 - ABBDocument7 pagesProduct Specification IRB 660 - ABBGiang Đinh HữuNo ratings yet
- Future Technology Briefing Biological Computing H. Kevin FulkeDocument18 pagesFuture Technology Briefing Biological Computing H. Kevin FulkeNilabh SharmaNo ratings yet
- Thesis Ideas (List of Titles)Document13 pagesThesis Ideas (List of Titles)kimberl0o0% (2)
- Report of Research Work at IECDocument4 pagesReport of Research Work at IECDHIRENDRA KUMAR SINGHNo ratings yet
- 60d042d30ac31 Problem Statement RoboticsDocument5 pages60d042d30ac31 Problem Statement RoboticsPAARTHASARATHY M K YNo ratings yet
- Fire-Fighting Robot NewDocument3 pagesFire-Fighting Robot NewYashaswi SharmaNo ratings yet
- Robot PDFDocument2 pagesRobot PDFDedy WijayaNo ratings yet
- Gesture Based CommunicationDocument3 pagesGesture Based Communicationanju91No ratings yet
- Me 2028 Robotics With QBDocument133 pagesMe 2028 Robotics With QBDharmendra Kumar0% (1)
- SB Imagebrochure en LQ CompressedDocument13 pagesSB Imagebrochure en LQ Compressedred patriotNo ratings yet
- Investigation of Design & Fabrication of In-Pipe Inspection RobotDocument4 pagesInvestigation of Design & Fabrication of In-Pipe Inspection RobotMilos BubanjaNo ratings yet
- Embedded Mini Project List - 2018Document4 pagesEmbedded Mini Project List - 2018HaneeshaNo ratings yet
- EME PPT Unit-5 - ElectiveDocument37 pagesEME PPT Unit-5 - ElectivesudeepkoreaNo ratings yet
- Bộ Đề Lý Anh 247.3Document51 pagesBộ Đề Lý Anh 247.3La VũNo ratings yet
- Kuka Touchsense 1.1: SoftwareDocument56 pagesKuka Touchsense 1.1: SoftwareDavidNo ratings yet