Professional Documents
Culture Documents
Jurnal 4 Refrensi 9
Uploaded by
bisniskuyOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Jurnal 4 Refrensi 9
Uploaded by
bisniskuyCopyright:
Available Formats
© The British Computer Society 2018. All rights reserved.
For Permissions, please e-mail: journals.permissions@oup.com
doi:10.1093/comjnl/bxy009
A New Multi-Objective Optimal
Programming Model for Task
Scheduling using Genetic Gray Wolf
Optimization in Cloud Computing
N. GOBALAKRISHNAN1* AND C. ARUN2
1
Department of Computer Science and Engineering, Sathyabama University, Chennai, Tamilnadu, India
2
Department of Electronics and Communication Engineering, R.M.K College of Engineering and
Technology, Chennai, Tamilnadu, India
*
Corresponding author: gobalakrishnanse@gmail.com
Nowadays, the cloud computing has emerged as the advanced form of distributed computing, grid
computing, utility computing and virtualization. Efficient task scheduling algorithms would help
reduce the number of virtual machines used and in turn reduce the cost and increase the fitness
function. According to this, a new multi-objective function is proposed combining load utilization,
energy consumption, migration cost and time. Using this objective function, we proposed a hybrid
algorithm namely Genetic Gray Wolf Optimization Algorithm (GGWO) by combining Gray Wolf
Optimizer (GWO) and Genetic Algorithm (GA). The performance of the algorithm is analyzed
based on the different evaluation measures. The algorithm such as GWO and GA algorithm is
compared with proposed GGWO and it is taken for the comparative analysis. To improve the per-
formance analysis the work has been computed with five common scientific workflows such as
LIGO, Montage, Epigenomics, SIPHT and Cybershake. Experiments show that GGWO can
improve task scheduling when compared with standard GWO and GA with minimum computa-
tion time, migration cost, energy consumption and maximum load utilization.
Keywords: multi-objective; genetic algorithm; gray wolf optimizer; GGWO; load utilization; energy
consumption; total time; migration cost
Received 17 June 2017; revised 25 November 2017; editorial decision 3 January 2018
Handling editor: Alan Marshall
1. INTRODUCTION
model for empowering advantageous, on-request organize
The collections of the interconnected computer that are given by access to a shared pool of configurable assets which can be
at least one are more united computing resources are known as immediately provided and discharged with insignificant adminis-
the cloud. In the course of recent years, the advancement of tration exertion or cloud provider cooperation [5]. Because of
cloud computing has simulated quick arrangement of inter-data this innovation, many advantages are applicable to improve
center systems to interface geographically conveyed data centers benefit in the market. The benefit in terms of time, cost, stack
for offering high-quality and dependable services [1]. These adjusting and storage. With this innovation, all applications keep
days, cloud computing has turned into an efficient paradigm to running on a virtual platform and every one of the resources is
offer computational abilities as administrations on a ‘pay-per- distributed among these virtual machines. Every last applica-
utilize’ premise [2]. Cloud computing brings the conformity and tion is distinctive and is independent.
change of the IT business. With its developing application and pro- In cloud computing, scheduling is another idea with ongoing
motion, cloud computing offers tremendous open doors, as well as days its climb to cloud fame. An essential method for booking is
confronts many difficulties in its advancement procedure [3, 4]. that mapping of preparing assignments to the resources on the
Recently, cloud computing has risen as another Internet-based premise of attributes. This all occurred with the care of every
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
2 N. GOBALAKRISHNAN AND C. ARUN
single accessible asset ought to be used properly [6–8]. Outlining populace size and a most extreme number of iteration for
a vitality proficient task scheduling is a basic step in the cloud its usefulness [14, 15].
associate approach. It chooses which tasks might be executed The objective of this paper is to develop an optimal task
in the cloud rather than on the mobile devices. Since task alloca- scheduling using a hybrid approach combining GWO and
tion on cloud computing resources is an outstanding NP-difficult GA in the cloud computing environment. Here GA algorithm
issue in the general form, because of the time constraint required is used in GWO algorithm is to improve the performance and
for run-time schedulers, the execution of vast time optimization to speed up the optimization process. Four parameters such
algorithm is not appropriate. For a real-time scheduler, it is as migration cost, total time, load utilization and energy con-
helpful to create heuristic procedures for imperfect arrangements, sumption are used to achieve the maximum fitness function
keeping in mind the end goal to build up a scheduling algorithm value. Our proposed GGWO hybrid algorithms presented
that keeps running in polynomial-time without performing a thor- with the derivation of fitness function in multi-objective tech-
ough search [9, 10]. Meanwhile, without considering task sched- niques, efficient solution representation along with the usual
uling, individuals have explored the multicast directing and GWO and Genetic operators. The rest of the paper is orga-
related resource allotment plans for optical systems in which can nized as follows: a brief review of some of the literature works
be connected to support inter-data centers communications [1]. based on task scheduling in cloud computing is presented in
At long last, tasks are assigned by the task scheduler to legitimate Section 2. Problem evaluation of our proposed method is
resources in distributed frameworks and task scheduling algo- given in Section 3. The proposed technique for hybrid multi-
rithms choose the execution request of these tasks. Because of objective optimization algorithm for task allocation in virtual
the fact that the task of the processors is a challenging issue, machines using proposed GGWO is given in Section 4. The
keeping in mind the end goal to minimize make span of utili- experimental results and the performance evaluation discus-
zations, different algorithms have been proposed. Since the sion are provided in Section 5. Finally, the conclusions are
task scheduling issue on Data centers is an NP-finish issue, summed up in Section 6.
thusly, different reviews have been made to acquire close ideal
answer for taking care of this issue [4, 11]. GWO is another
swarm insight algorithm propelled from mirroring the lead-
2. LITERATURE SURVEY
ership chain of importance and chasing mechanism of gray
wolves. GWO is ended up being focused or better than other Literature presents several works related to task scheduling in
traditional metaheuristics, for example, differential transforma- cloud computing. Here, we review some recent works related to
tive and molecule swarm improvement calculation [12, 13]. task scheduling in cloud computing. Zuo et al. [16] have pro-
Moreover, GWO is an extremely proficient metaheuristic posed an asset cost demonstrate that characterizes the request of
algorithm because of its high joining speed and basic task on a resource with more details. This model mirrors the
mathematical model. GWO just requires characterizing of relationship between the client’s asset costs and the spending
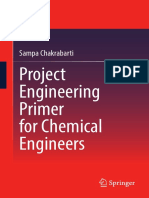
User
User interface
Physical machine Physical machine
VM1 VM2 VM1 VM2
Resource monitor
Request manager VM Monitor VM Monitor
CPU Memory Storage CPU Memory Storage
Scheduler
Task
FIGURE 1. Architecture of proposed technique.
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 3
costs. A multi-target advancement planning technique has been utilized for undertaking planning issues. In [23], Xu et al. devel-
proposed in view of this asset cost display. This technique con- oped two resources pre-designation algorithms in light of the
siders the make span and the client’s spending costs as limita- ‘shut down the repetitive, turn on the requested’ procedure here.
tions of the enhancement issue, accomplishing multi-objective First, a green cloud computing model is displayed, abstracting the
advancement of both execution and cost. An enhanced ant col- undertaking planning issue to the virtual machine arrangement
ony algorithm has been proposed to tackle this issue. Two issue with the virtualization innovation. Also, the future work-
requirement capacities were utilized to assess and give criticism loads of the framework should be anticipated: a cubic exponen-
with respect to the execution and budget cost. Moreover, Hua tial smoothing calculation in light of the traditionalist control
et al. [17] have formulated the task scheduling issue. At that technique is proposed, consolidating with the present state and
point, a task scheduling arrangement is progressed to get the asset dispersion of framework, so as to figure the request of assets
ideal asset usage, undertaking finish time, normal cost and nor- for the following time of task requests.
mal energy consumption. With a specific end goal to keep up
the molecule differing qualities, the versatile acceleration coeffi-
cient is received. Similarly, Liu et al. [18] have developed an
energy-efficient scheduling of tasks, in which the cell phone off- 3. PROBLEM WITH SOLUTION FRAMEWORK
loads suitable undertakings to the cloud through a Wi-Fi get to The resources allocation framework is shown in Fig. 1. Cloud
point. The planning means to minimize the vitality utilization of provides physical machines and virtual machines for a public
cell phone for one application under the imperative of aggregate interface within its proprietary infrastructure. By using User
finishing time. This undertaking planning issue is reproduced in interface component, the application (task) request is received
an obliged most brief way issue and the LARAC technique is from Cloud consumer. The request manager then receives the
connected to get the inexact optimal solution. task from the user interface and then collects and manages all
In [19], Zhu et al. have developed the resource model of the accepted users request. The cloud Resource pool such as CPU,
cloud data center and the dynamic power model of the physical memory and storage is monitored by the Resource Monitor. The
machine, and after that propose a 3D virtual asset planning strat- Scheduler component is to schedule tasks to the cloud to minim-
egy for vitality sparing in distributed computing (TVRSM), in ize fitness function. This scheduling process occurs by using the
which the procedure of virtual asset booking are isolated into constrained task based on the performance of virtual machines.
three phases: virtual asset assignment, virtual asset planning and The data from the Request Manager and Resource Monitor are
virtual asset improvement. For the distinctive target of every collected by the scheduler and then makes a decision to allocate
stage, they plan three unique algorithms. Lin et al. [20] have each task to the virtual machine.
investigated the issue of scheduling tasks in the MCC environ- In physical machine (PM) scheduling, we have two types of
ment. All the more exactly, the planning issue includes the problems in existing such as routing problem and sequencing
accompanying strides: (i) deciding the assignments to be off- problem. To assign each task to the corresponding virtual
loaded onto the cloud, (ii) mapping the rest of the undertakings machine (VM), we can obtain routing problem and to series the
onto nearby centers in the cell phone, (iii) deciding the frequen- task on the virtual machines to decrease the entire migration
cies for executing local tasks and (iv) booking all assignments cost, total time, load utilization and energy consumption. Let us
on the centers and the remote correspondence channels with the consider the user task Ta and each task is permissible to be admi-
end goal that the assignment priority prerequisites and the appli- nistered on any specified accessible virtual machine VMi .
cation finish time imperative are fulfilled while the aggregate Primarily, it is pre-assumed that there is p the number of tasks
vitality dispersal in the cell phone is minimized. Moreover, Li Ta = (T1, T2, ¼, Tp), r the number of virtual machines VMi =
[21] have designed and examine the execution of heuristic algo- (VM1, VM2, ¼, VMr ) and s the number of physical machines
rithms that utilize the equivalent speed technique. Pre-control PMi = (PM1, PM2, ¼, PMs) in the current scheme of cloud
assurance algorithms and post power-assurance algorithms are computing. A virtual machine in the cloud has a CPU, memory
created for both vitality and time-constrained scheduling of pri-
ority compelled parallel tasks on numerous many-core proces- TABLE 1. Parameters used in task scheduling.
sors with ceaseless or discrete speed levels.
Additionally, Abdullahi et al. [22] have presented a Discrete Symbol Definition
Symbiotic Organism Search (DSOS) algorithm for the ideal plan- Ta Task a , 1 £ i £ p
ning of undertakings on cloud assets. Advantageous Organism VMi Virtual Machine i , 1 £ i £ r
Search (SOS) is a recently created metaheuristic advancement PMi Physical Machine s , 1 £ i £ s
strategy for taking care of numerical enhancement issues. SOS Tp Number of tasks
emulates the cooperative connections displayed by living beings VMr Number of virtual machines
in an environment. Simulations come about uncovered that PMs Number of physical machines
DSOS outflanks Particle Swarm Optimization which is a standout l1, l2, l3, l 4 Control parameters
amongst the most well-known heuristic enhancement strategies
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
4 N. GOBALAKRISHNAN AND C. ARUN
and storage. A task is allocated on one Virtual machine based Here,
on its performance at a total time and the given resources are
available continuously. Each task requires being executed in one 1 é VMi æ Number of movements ö ù
MF = êå ç ÷÷ ú,
VM instance. Task scheduling of cloud computing can be quan- PM ê ççè Total VM ÷ø ú
ë i = 1 û
tified as follows:
Maximize, VMi
æ Cost to run ´ Memory of task ö
Fitness Function = Max [l1 (1 - Tt ) + l2 (1 - MC )
CF = å çççè VM ´ PM
÷÷ ,
÷ø
i=1
(1 )
+ l3 (LU ) + l 4 (1 - EC )] ,
where movement factor (MF) and cost factor (CF) are calcu-
lated to find the minimum migration cost value. Similarly, load
where Tt- is the total time, MC is the migration cost, LU is
utilization (LU) is the third parameter of the objective function.
the load utilized and EC is the energy consumption.
LU is the process of distributing workloads in a cloud comput-
Our objective function is to maximize the fitness function
ing environment. It allows enterprises to manage workload by
value. In our approach, we take l1 + l2 + l3 + l 4 = 1 and
allocating tasks among multiple virtual machines. LU is the way
0 £ li £ 1, " i, 1 £ i £ 4.
In this paper, the objective function is based on the four
parameters such as total time, migration cost, load utilization Start
and energy consumption. Here, each task has a different total
time, migration cost, load utilization and energy consumption.
To formulate this problem, control parameters such as l1, l2, Generate initial population
l3 and l 4 with the range of [0, 1] are defined. The problem
can be formulated by using Equation (1). In this paper, the first
parameter is considered as total time (Tt ). The time taken for Evaluate the fitness
executing the overall process is known as total time. The total
time taken to allocate the task in a virtual machine should be
the minimum value. The total time taken to complete the task
Find the α, β, δ
Tt is given in the following equation:
Tt = å TR + å TP + å TW , (2)
Update the prey position
where the total time includes processing time of the task TP ,
receiving time off task TR and waiting time TW . Similarly, migra-
tion cost (MC) is the second parameter of scheduling. Cost of Update the worst solution using crossover and
executing the whole task also increases due to increase in execu- mutation process
tion time and costly resource allocation in place of more efficient
resources, which can be used according to the task, is known as
migration cost. The migration cost should also get the minimum Evaluate the fitness
value to achieve an objective function that is maximum fitness
function. The total migration cost can be calculated by using the No
following equation: Terminate
MF + CF
MC = . (3) Yes
2
End
TABLE 2. Parameters described. FIGURE 2. Flowchart for proposed GGWO.
Parameters used Physical Machine (PM)
TABLE 3. Particle coding and decoding.
VM1 VM2 VM3 VM4 VM5 VMN
PM1 PM2
Total time ti1 ti2 ti3 ti4 ti5 tin
Migration cost MC1 MC2 MC3 MC4 MC5 MCn Dimensions VM1 VM2 VM3 VM4 VM5
Load utilization L1 L2 L3 L4 L5 Ln Position 0.1 0.4 0.2 0.9 0.8
Energy consumption EC1 EC2 EC3 EC4 EC5 ECn Priority 1 3 2 5 4
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 5
of distributing workloads over numerous computing resources. included in the proposed model contains movement factor and
LU adjusting decreases a cost related to document administra- cost factor. Similarly, the total time model includes receiving,
tion systems and maximizes accessibility of fitness function: processing and waiting time. The good virtual machine schedul-
ing decreases the total running time, migration cost and energy
1 é PMi VMi
1 CPU Utilized
ê consumption with maximum load utilization [28, 29].
LU = å
PMi ´ VMi êê i = 1
å3 CPUij
ë j=1
, (4)
MemoryUtilized Time Utilized ùú 4.1. Scheduling optimization model based on multi-
+ + ú
Memoryij Timeij úû objective function
where CPUij is the total number of CPUs that are taken in a Here, we have intended the parallel machine scheduling based
virtual machine, Memoryij is the total number of memories on multi-objective function using Genetic Gray wolf optimizer.
that are available in a virtual machine and Time ij is the total GWO algorithm mimics the leadership hierarchy and hunting
duration of time in the virtual machine. Amount of energy mechanism of gray wolves in nature. To progress the perform-
consumed in a task scheduling process in a cloud computing ance of the scheme, in our paper we utilize Genetic algorithm-
environment. To attain the maximum fitness function, energy based Gray wolf optimizer (Table 2).
consumption (EC ) is also one of the important parameters: This scheduling method is able to obtain an optimal or sub-
optimal result in a minimum computational migration cost, total
1 é PMi VMi ù time, energy consumption and maximum load utilization. The
ê
EC = å
PMi ´ VMi êê i = 1
å Uij Dmax + (1 - Uij) jij Dmaxúú , step by step process of proposed parallel machine scheduling is
ë j=1 úû
explained below. Flowchart of proposed virtual machine sched-
(5 ) uling is shown in Fig. 2.
where Step 1: Solution encoding: In this proposed work, the solu-
tion consists of two components such as task and virtual
Uij , Dmax Î [0, 1] ,
1 æç CPU Utilized ö÷ æç Memory Utilized ö÷÷
jij = ç ÷÷ + çç ÷÷
3 ççè CPUij ÷ø çè Memoryij ÷ø
.
æ Time Utilized ö
+ ççç ÷÷
÷÷
çè Timeij ø
In Equation (1), the objective function of our research is
specified. The first term of Equation (1) signifies the total
time of the task, the second term signifies the migration cost,
the third term signifies the load utilization and the fourth term
signifies the energy consumption. From the formulation, we
can see that the problem is a task scheduling one. Solving
such problems using a mathematical programming approach
will take a large amount of computational time for a large FIGURE 3. Crossover operation for worst chromosomes.
size problem. In this paper, the above objective function is
going to be maximized using the proposed algorithm. The
parameters used in the proposed method are given in Table 1.
4. TASK SCHEDULING USING HYBRID GGWO
The main intention of this paper is to optimize task and resource
scheduling using gray wolf optimizer [24, 25] and to improve
the optimization process using genetic algorithm [26, 27] based
hybrid approach (GGWO) based on the proposed migration
cost, time, load utilization and energy consumption models on
cloud computing environment. To optimize the virtual machine,
we utilize multi-objective function based on migration cost and
total time model of proposed approach. The migration cost FIGURE 4. Mutated chromosome.
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
6 N. GOBALAKRISHNAN AND C. ARUN
machines. At first, we randomly assign each task to any one vir- TABLE 4. Pseudo code of proposed parallel machine scheduling.
tual machine. For example, we consider five tasks, two physical
Input:
machines (PM1 and PM2) and then PM 1 has two virtual machines
The parameter of GGWO algorithm
(VM1, VM2) and PM2 has three virtual machines (VM3, VM4 and
The parameter of Virtual machine scheduling
VM5). Here we consider an initial solution (S) as VM1, VM2, VM3,
Output:
VM4 and VM5 as given in below example. The main objective of
A scheduled task
this paper is to schedule these five tasks to corresponding five
Assumption:
virtual machines optimally based on its performance and further
Input solution Si , Fitness Function, Migration cost, Total time, Load
steps are explained below.
utilization and Energy consumption.
Solution representation: Each application contains many
Initialization:
tasks, such that all applications can be considered as a set of tasks.
Initialize the number of tasks Ti , number of virtual machines VMi ,
Then the tasks should be scheduled in virtual machines and its
number of physical machine PMi and Coefficient vector X, Y and a.
dimensions are given by D = (VM1, VM2 , VM3, VM4, VM5).
Start:
Then the position of each virtual machine is considered based
Generate the initial population Si , i = 1, 2, ¼, n
on its specifications. The position value of each dimension is
for all Si , do
given by P = (0.1, 0.4, 0.2, 0.9, 0.8). The position is choosing
Evaluate the fitness function of the population using (1)
based on the priority values as shown in Table 3. Thus, we can
end for
obtain a priority sequence of tasks, Priority = {1, 3, 2, 5, 4}.
Set iteration to 1
Step 2: Fitness calculation: Once the initial solution is gener-
Repeat
ated, the fitness value of each individual is evaluated and stored
Select the best search agent Sa
for future reference. The fitness function is defined by using
Select the second best agent Sb
Equation (1). Maximum fitness function value is given by min-
Select the third best agent Sg
imum total time, minimum migration cost, maximum load util-
While (t < max number of iterations)
ization and minimum energy consumption as mentioned in
for each search agent
Equation (1). In order to calculate total time, migration cost, load
Update the position of the current search agent using Equation (11)
utilization and energy consumption Equations (2–5) is used:
end for
FitnessFunction = Max [l1 (1 - Tt ) + l2 (1 - MC ) Update a , X, Y
. Calculate fitness of all search agents
+ l3 (LU ) + l 4 (1 - EC )]
Update Sa , Sb and Sg
Moreover, based on these equations, we calculate the fitness Produce crossover and mutation to update the worst chromosome
function for each virtual machine. The maximum fitness func- // Crossover
tion gained virtual machine is considered as the best solution. {
Then remaining virtual machines are updated based on these For i = 1, 2…,N do
functions for finding the best solution. Randomly select two worst chromosomes w1 and w2 from the
Step 3: Calculating a, b , d and w : We find out a , b , d and initial solution or population
w after calculating the fitness function. Here, while conceiving Generate w11 and w12 by one point crossover
the GGWO, the alpha (a) is esteemed as the most suitable Save w11 and w12 to the new solution wiNew
arrangement with a perspective to replicating logically the social End for
pecking order of wolves. Thus, the second and the third best }
arrangements are named as beta (b ) and delta (d ) separately. // Mutation
The remaining applicant arrangements are regarded to be the {
omega (w ). Let the first best fitness solutions be Sa , the second For i = 1, 2….N do
best fitness solutions Sb and the third best fitness solutions Sd . Select the new solution from the crossover
Step 4: Encircling prey: The hunting is guided by a , b , d Mutate each bit of wiNew ;
and w follow these three candidates. In order to hunt, a prey Save mutated solution as the new solution
is first encircled: End for
}
S (t + 1 ) = S (t ) + X ⋅ K , (6 ) t=t+1
end while
return Sa
K = | Y ⋅ S (t + 1) - S (t )| , (7 )
end
scheduled task
X = 2
a r1 -
a and Y = 2r2. (8 ) stop
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 7
Step 5: Hunting: As a solution, we heard the chief three
a b
best results achieved so far and need the other search agents K = | Y1 ⋅ Sa - S| , K = | Y2 ⋅ Sb - S| ,
to reread their positions rendering to the position of the best d
search agent. For recurrence, the novel solution S (t + 1) is K = | Y3 ⋅ Sd - S| (9)
assessed by using the formulae cited underneath:
TABLE 5. Parameter description.
Parameter description Problem Instance 1 Problem Instance 2 Problem Instance 3
Range Range Range
Physical machine 50 100 200
Virtual machine 126 294 589
Tasks 100 200 400
CPU 126 294 589
Memory 100 MB–1 GB 100 MB–1 GB 100 MB–1 GB
Time 1000 ms–100 000 ms 1000 ms–100 000 ms 1000 ms–100 000 ms
TABLE 6. Performance analysis for problem instances in terms of load utilization.
Iterations Problem instances
Problem Instance 1 Problem Instance 2 Problem Instance 3
GWO GA GGWO GWO GA GGWO GWO GA GGWO
5 0.39 0.38 0.4 0.32 0.31 0.33 0.25 0.24 0.26
10 0.39 0.38 0.4 0.33 0.32 0.34 0.25 0.24 0.26
15 0.4 0.38 0.41 0.33 0.32 0.34 0.26 0.24 0.26
20 0.4 0.39 0.41 0.33 0.32 0.35 0.26 0.24 0.27
TABLE 7. Performance analysis for problem instances in terms of migration cost.
Iterations Problem instances
Problem Instance 1 Problem Instance 2 Problem Instance 3
GWO GA GGWO GWO GA GGWO GWO GA GGWO
5 0.019 0.02 0.017 0.015 0.017 0.014 0.013 0.015 0.011
10 0.019 0.02 0.017 0.015 0.017 0.014 0.013 0.015 0.011
15 0.019 0.019 0.017 0.015 0.017 0.014 0.013 0.015 0.011
20 0.019 0.19 0.017 0.015 0.017 0.014 0.013 0.015 0.011
TABLE 8. Performance analysis for problem instances in terms of energy consumption.
Iterations Problem instances
Problem Instance 1 Problem Instance 2 Problem Instance 3
GWO GA GGWO GWO GA GGWO GWO GA GGWO
5 0.41 0.38 0.42 0.25 0.25 0.26 0.22 0.23 0.21
10 0.41 0.38 0.42 0.25 0.26 0.27 0.22 0.23 0.21
15 0.43 0.39 0.44 0.26 0.26 0.27 0.23 0.23 0.21
20 0.43 0.4 0.44 0.26 0.26 0.28 0.23 0.25 0.21
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
8 N. GOBALAKRISHNAN AND C. ARUN
TABLE 9. Performance analysis for problem instances in terms of processing time.
Iterations Problem instances
Problem Instance 1 Problem Instance 2 Problem Instance 3
GWO GA GGWO GWO GA GGWO GWO GA GGWO
5 256 646 2 826 416 233 646 378 456 396 545 356 562 674 514 686 494 648 946
10 295 165 3 165 454 251 444 389 561 401 654 366 664 682 664 696 798 654 970
15 314 548 3 346 574 278 454 394 451 425 454 385 165 689 116 699 787 659 641
20 321 541 3 452 544 294 512 400 025 445 484 391 464 693 264 700 064 669 614
a 0.68
S1 = Sa - X1 ⋅ ( K ) , 0.66
b
S2 = Sb - X2 ⋅ ( K ) , (10) 0.64
Fitness Function
0.62
d 0.6
S3 = Sd - X3 ⋅ ( K ) 0.58
0.56
S1 + S2 + S3 0.54
S (t + 1 ) = . (11) 0.52
3 0.5
5 10 15 20
It can be recognized that the concluding location would be GWO 0.6384 0.6384 0.6504 0.6504
in a random place within a circle that is distinct using the GA 0.62 0.62 0.6264 0.564
positions of alpha, beta and delta in the search space. GGWO 0.6452 0.6452 0.6572 0.6572
Step 6: Solution Updation using crossover and muta-
No. of iterations
tion: In our work, crossover and mutation of GA algorithm
are used to improve the performance of GWO algorithm and
to speed up the optimization process. FIGURE 5. Comparative analysis for problem Instance 1 in terms
of fitness function (50 PM and 126 VM).
0.565
4.2. Crossover operation 0.56
Fitness Function
0.555
Here while task scheduling by using GWO algorithm, we have 0.55
considered 50% of the solution as best and remaining 50% as the 0.545
worst solution. The remaining 50% worst solution is updated by 0.54
using crossover process for a better solution. For example, here 0.535
five tasks are considered and coded as a chromosome integer as 0.53
5 10 15 20
shown in Fig. 2. Suppose, the first chromosome selected from GWO 0.544 0.544 0.55 0.55
obtained worst population (obtained using GWO) to be denoted GA 0.5432 0.5492 0.5492 0.5492
GGWO 0.5504 0.5564 0.5564 0.5624
as worst Chromosome 1 (w1) and second chromosome selected
No. of iterations
from obtained worst population (obtained using GWO) to be
denoted as worst Chromosome 2 (w2). The left segment of the
new Chromosome 1 or new Chromosome 2 is inherited from FIGURE 6. Comparative analysis for problem Instance 2 in terms
of fitness function (100 PM and 294 VM).
the corresponding segment of the worst Chromosome 1 (0.1, 0.4,
0.6, 0.3, 0.8) or worst Chromosome 2 (0.5, 0.2, 0.9, 0.7, 0.6),
respectively. Here we can delete the tasks from the topological
order, and it will still be a topological order without violating the Same five tasks are considered and mutation technique is
precedence constraints. For, example, second and third position applied to the new chromosome. Here single point mutation
of w2 is crossed over with fourth and fifth position of w1. Finally is applied for mutation operation. A single point is chosen
the new Chromosome 1 (0.1, 0.4, 0.6, 0.2, 0.9) and new and mutated with another point as shown in Fig. 4.
Chromosome 2 (0.5, 0.2, 0.4, 0.3, 0.8) is the updated solution. A Step 7: Attacking prey and Search for prey: The adap-
detailed description of the crossover operation is given in Fig. 3. tive values of parameters a and X permit GGWO to smoothly
Mutation Operation: Here in mutation process, the cross- transition amongst exploration and exploitation. With declin-
over solution is taken and that solution must be mutated. ing A, half of the iterations are dedicated to exploration
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 9
0.55 (|X| ³ 1) and the other half are devoted to exploitation (|X| < 1).
0.545 The GWO has only two chief parameters to be attuned (a and Y).
0.54
The technique will be managed by the maximum number of
Fitness Function
0.535
0.53
iterations is accomplished. Ultimately, the optimal outcomes are
0.525 chosen on the premise of the fitness value.
0.52 Step 8: Termination criteria: Once the best fitness is
0.515 achieved by a method for GGWO algorithm, the chosen task
0.51 is allocated for cloud computing process and the execution is
0.505
5 10 15 20 terminated (Table 4).
GWO 0.5268 0.5268 0.5328 0.5328
GA 0.52 0.52 0.52 0.52
GGWO 0.5336 0.5336 0.5336 0.5456
No. of iterations 5. SIMULATION RESULT AND DISCUSSION
In this section, we examine the outcome obtained from the
FIGURE 7. Comparative analysis for problem Instance 3 in terms
proposed GGWO algorithm-based task scheduling procedure.
of fitness function (200 PM and 589 VM).
We have actualized our proposed undertaking task scheduling
(a) 0.4 (b) 0.36
0.35
Load utilization
Load utilization
0.3 0.34
GWO 0.33 GWO
0.2
GA 0.32 GA
0.1 GGWO 0.31 GGWO
0.3
0 0.29
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(c) 0.36 (d) 0.36
0.34 0.34
Load utilization
Load utilization
0.32 GWO 0.32 GWO
0.3 GA 0.3 GA
GGWO GGWO
0.28 0.28
0.26 0.26
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(e) 0.36
0.35
Load utilization
0.34
GWO
0.33
GA
0.32
GGWO
0.31
0.3
5 10 15 20
No. of iterations
FIGURE 8. Performance analysis on real-world dataset in terms of load utilization: (a) LIGO, (b) Montage, (c) Epigenomics, (d) SIPHT and
(e) Cybershake.
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
10 N. GOBALAKRISHNAN AND C. ARUN
(a) 0.018 (b) 0.02
0.017
0.015
Migration cost
Migration cost
0.016 GWO GWO
0.01
GA GA
0.015
GGWO GGWO
0.005
0.014
0.013 0
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(c) 0.0175 (d) 0.02
0.017
0.0165 0.015
Migration cost
Migration cost
0.016
GWO GWO
0.0155 0.01
GA GA
0.015
GGWO GGWO
0.0145 0.005
0.014
0.0135 0
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(e) 0.018
0.017
Migration cost
0.016 GWO
GA
0.015
GGWO
0.014
0.013
5 10 15 20
No. of iterations
FIGURE 9. Performance analysis on real-world dataset in terms of migration cost: (a) LIGO, (b) Montage, (c) Epigenomics, (d) SIPHT and (e)
Cybershake.
using Java (jdk 1.6) with cloudSim devices and a progression Instance 2, the middle range parameters are taken and in problem
of experiments was performed on a PC with Windows 7 Instance 3, high-range parameters are taken. Then the perform-
Operating framework at 2 GHz dual core computer with 4 GB ance analysis is taken based on problem Instance 1, problem
RAM running a 64-bit version of Windows 2007. Instance 2 and problem Instance 3 such as (i) Performance ana-
lysis with 50 Physical Machines and 126 Virtual Machines
(Problem Instance 1), (ii) Performance analysis with 100 Physical
5.1. Parameter setup
Machines and 294 Virtual Machines (Problem Instance 2) and
The basic idea of our proposed methodology is virtual machine (iii) Performance analysis with 200 Physical Machines and 589
scheduling using GGWO algorithm. Here, at first, we assign Virtual Machines (Problem Instance 3). Here 100, 200 and 400
the N number of task and M number of resources. To schedule such tasks were used for scheduling processes to allocate in vir-
the task based on the migration cost, total time, load utilization tual machines and 100 tasks are considered in problem Instance
and energy consumption function (Table 5). 1, then 200 task is considered in problem Instance 2 and 400
In this work, we have taken three problem instances. In prob- task is considered in problem Instance 3. The total number of
lem Instance 1, the low range parameters are taken, in problem CPUs utilized is equal to a total number of virtual machines
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 11
(a) 0.29 (b)
0.29
Energy consumption
0.28
Energy consumption
0.28
0.27 0.27
GWO GWO
0.26 0.26
GA GA
0.25 0.25
GGWO GGWO
0.24 0.24
0.23 0.23
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(c) 0.3 (d) 0.28
0.29
Energy consumption
Energy consumption
0.28 0.27
0.27 GWO GWO
0.26
0.26 GA GA
0.25 GGWO 0.25 GGWO
0.24
0.23 0.24
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(e) 0.29
Energy consumption
0.28
0.27
GWO
0.26
GA
0.25
GGWO
0.24
0.23
5 10 15 20
No. of iterations
FIGURE 10. Performance analysis on real-world dataset in terms of energy consumption: (a) LIGO, (b) Montage, (c) Epigenomics, (d) SIPHT
and (e) Cybershake.
used in each problem instances. Then the range used for mem- Table 7 presents the performance comparison of existing
ory is 100 MB–1 GB and for load 1000 ms–100 000 ms. GWO, GA and the proposed GGWO algorithms in terms of
migration cost. For effective objective function the migration
cost of the proposed algorithm must be minimum. From
5.2. Performance comparisons
Table 7, it is deduced that the proposed GGWO gives better
Table 6 shows the performance comparison of problem performance than the existing swarm-based techniques. Due
instances in terms of load utilization. The values in GGWO to this, the proposed algorithm can provide better objective
algorithm in Tables 6–9 indicate that the proposed algorithm values in majority of the three problem instances. Compared
gives better objective values than the other existing GWO with GWO and GA, the performance improvement of the pro-
and GA algorithms. posed GGWO algorithm in terms migration cost is 1.7% for
The results shown in Table 6 suggest that the GGWO algo- the problem Instance 1, 1.4% for the problem Instance 2 and
rithm provides considerably better performance for load util- 1.1% for the problem Instance 3.
ization in terms of 40.5% for the problem instance 1, 34% for Table 8 shows the performance comparison of the results
the problem Instance 2 and 26.25% for the problem Instance obtained by the proposed GGWO algorithm in terms of
3, compared with existing GWO and GA. energy consumption. The results presented in Table 8 suggest
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
12 N. GOBALAKRISHNAN AND C. ARUN
(a) 50000000 (b) 50000000
40000000 40000000
Processing time
Processing time
30000000 GWO 30000000 GWO
GA GA
20000000 20000000
GGWO GGWO
10000000 10000000
0 0
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(c) 50000000 (d) 50000000
40000000 40000000
Processing time
Processing time
30000000 GWO 30000000 GWO
GA GA
20000000 20000000
GGWO GGWO
10000000 10000000
0 0
5 10 15 20 5 10 15 20
No. of iterations No. of iterations
(e) 50000000
40000000
Processing time
30000000 GWO
GA
20000000
GGWO
10000000
0
5 10 15 20
No. of iterations
FIGURE 11. Performance analysis on real-world dataset in terms of processing time: (a) LIGO, (b) Montage, (c) Epigenomics, (d) SIPHT and
(e) Cybershake.
that the proposed GGWO algorithm notably provides better
5.3. Comparative analysis for problem instances in
objective values in terms energy consumption is 4.3% for the
terms of fitness function
problem Instance 1, 2.7% for the problem Instance 2 and
2.1% for problem instance 3. The proposed GGWO technique archives minimum migration
The objective value comparison of the proposed GGWO cost, total time, energy consumption and maximum load utiliza-
and the existing GWO and GA are presented in Table 9 in tion than the existing GWO and GA models while using prob-
terms of processing time respectively. The processing time is lem Instance 1 such as 50 physical machines, 126 virtual
calculated here in milliseconds (ms). The processing time of machines and 100 tasks. As per our objective function, the fit-
proposed GGWO algorithm must be minimum when com- ness function value should also be maximum. Hence we get
pared with existing GWO and GA algorithms. minimum total time, migration cost, energy consumption and
The processing time of the proposed GGWO algorithm maximum load utilization for achieving maximum fitness func-
is less when compared with the existing GWO and GA for tion value. Comparative analysis graph that is given clearly
three problem instances. Therefore, the GGWO algorithm shows that the fitness value of the proposed method is max-
provides better performance in the task scheduling problem imum than GWO and GA technique. Figures 5–7 show result
in distributed systems when compared with other existing of the fitness function using three problem instances.
algorithms with respect to multiple objectives and com- Figure 5 shows the comparative analysis of the results
plexity of the algorithms. obtained by the proposed GGWO algorithm in terms of fitness
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
A NEW MULTI-OBJECTIVE OPTIMAL PROGRAMMING MODEL 13
function. From Fig. 5, it is deduced that the proposed GGWO number of iterations gets increased the energy consumption
gives better fitness function value than the existing GWO and will be high in proposed GGWO algorithm than the existing
GA techniques. The performance improvement of the pro- GWO and GA algorithms.
posed GGWO algorithm in terms fitness function is 65.12%, The overall processing time is shown in Fig. 11 for real-
while GWO value is 64.44% and GA is 60.76% for the prob- world datasets. The processing time is reduced by using
lem Instance 1. GGWO algorithm for scheduling the task oin VM’s. Hence,
In Fig. 6, fitness function comparison for problem Instance by analyzing, the performance of our proposed GGWO algo-
2 for proposed GGWO algorithm achieves 55.64% while rithm in real-world datasets gives the better performance than
GWO has 54.7% and GA has 54.77%. the existing techniques.
Then by observing Fig. 7, it has shown that for the fitness
function values for problem Instance 3 is compared between
proposed GGWO and Existing GA and GWO techniques. For 6. CONCLUSION
GGWO, the fitness function value is 53.66%, where GWO
has 52.98% and GA has 52%. Hence, by comparing three In this paper, a multi-objective task scheduling method was pro-
problem instances, our proposed GGWO algorithm gives bet- posed based on the hybrid approach of genetic gray wolves opti-
ter performance than the existing GWO and GA techniques. mization (GGWO). The multi-objective optimization approach
By analyzing the above results by using problem Instance 1, is used to improve the scheduling performance compared with
problem Instance 2 and problem Instance 3, our parameters single objective function. Here multi-objective function such as
such as total time, migration cost and energy consumption have total time, migration cost, load utilization and energy consump-
a minimum value and load utilization has maximum value for tion were taken for better performance. In GGWO, each dimen-
proposed GGWO when compared with the existing GWO and sion of a solution represents a task and a solution as a whole
GA value. Hence, the proposed GGWO algorithm gives the representation of all tasks priorities. Here GA is improving the
better objective function value than the existing one. From here performance of the GWO algorithm while optimizing the task in
we came to know that our proposed GGWO hybrid algorithm virtual machines. This approach is able to obtain a high-quality
is effective for task scheduling in cloud computing. scheduling task by adaptively selecting crossover mutation
updating strategies to update each task. The experimental results
took based on three such problem instances. Finally, five com-
mon scientific workflows such as LIGO, Montage, Epigenomics,
5.4. Performance analysis on real-world dataset SIPHT and Cybershake performance were compared with
In this section, the simulations were conducted using five com- our proposed GGWO technique. The result shows our pro-
mon scientific workflows such as LIGO, Montage, Epigenomics, posed multi-objective-based task scheduling is better than
SIPHT and Cybershake and each of these generated workflows other approaches. Its results are better than standard GWO
consisted of 1000 tasks. In order to process the real-world data- and GA algorithm, and for task scheduling problem, experi-
set, we took problem Instance 2 (100 Physical Machines, 294 mental results demonstrated that the GGWO-based schedul-
Virtual Machines and 200 tasks) for the execution. ing approach was well suited.
The load utilization of each algorithm is displayed in Fig. 8.
The X-axis in Fig. 8 is the load utilization and the Y-axis is the
number of iterations that is used for scheduling the task. While REFERENCES
the number of iterations increased the load utilization is high
in the proposed GGWO algorithm than GWO and GA algo- [1] Wu, K., Lu, P. and Zhu, Z. (2016) Distributed online schedul-
rithms. By observing Fig. 8, LIGA and SIPHT give the high ing and routing of multicast-oriented tasks for fitness function-
driven cloud computing. IEEE Commun. Lett., 20, 684–687.
performance than the other datasets.
Ultimately in Fig. 9, the migration cost vs. number of itera- [2] Zhu, X., Chen, C., Yang, L.T. and Xiang, Y. (2015) ANGEL:
agent-based scheduling for real-time tasks in virtualized clouds.
tions performance of each existing GFWO, GA and proposed
IEEE Trans. Comput., 64, 3389–3403.
GGWO algorithms is the most significant basis for evaluating
[3] Cheng, C., Li, J. and Wang, Y. (2015) An energy-saving task
their performance. For example in Montage, nearly 200 parallel
scheduling strategy based on vacation queuing theory in cloud
tasks out of 1000 in first two levels need to be scheduled. As computing. Tsinghua Sci. Technol., 20, 28–39.
expected, experimental results in Fig. 9 show that the migration [4] Lovász, G., Niedermeier, F. and De Meer, H. (2013) Perform-
cost of the task scheduling is almost constant for GGWO algo- ance tradeoffs of energy-aware virtual machine consolidation.
rithm even when the number of iterations increases and the cost Cluster Comput., 16, 481–496.
is less when compared with existing GWO and GA. [5] Keshanchi, B., Souri, A. and Navimipour, N.J. (2017) An improved
The best performance of GGWO belongs to Epigenomics genetic algorithm for task scheduling in the cloud environments
and Cybershake, which has a energy consumption in all itera- using the priority queues: formal verification, simulation, and
tions. The experimental result of Fig. 10 shows, when the statistical testing. J. Syst. Softw., 124, 1–21.
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
14 N. GOBALAKRISHNAN AND C. ARUN
[6] Bansal, N., Maurya, A., Kumar, T., Singh, M. and Bansal, S. [18] Liu, T., Chen, F., Ma, Y. and Xie, Y. (2016) An energy-
(2015) Cost performance of QoS Driven task scheduling in efficient task scheduling for mobile devices based on cloud
cloud computing. Procedia Comput. Sci., 57, 126–130. assistant. Future Gener. Comput. Syst., 61, 1–12.
[7] Ali, H.G.E.D.H., Saroit, I.A. and Kotb, A.M. (2016) Grouped [19] Zhu, W., Zhuang, Y. and Zhang, L. (2017) A Three-dimensional
tasks scheduling algorithm based on QoS in cloud computing Virtual Resource Scheduling Method for energy saving in cloud
network. Egypt. Inform. J., 18, 11–19. computing. Future Gener. Comput. Syst., 69, 66–74.
[8] Patel, R. and Mer, H. (2013) A survey of various qos-based [20] Lin, X., Wang, Y., Xie, Q. and Pedramm, M. (2015) Task
task scheduling algorithm in cloud computing environment. scheduling with dynamic voltage and frequency scaling for
Int. J. Sci. Technol. Res, 2, 109–112. energy minimization in the mobile cloud computing environ-
[9] Juarez, F., Ejarque, J. and Badia, R.M. (2016) Dynamic Energy- ment. IEEE Trans. Serv. Comput., 8, 175–186.
Aware Scheduling for Parallel Task-Based Application in Cloud [21] Li, K. (2017) Scheduling parallel tasks with energy and time
Computing. Future Generation Computer Systems Available online constraints on multiple many core processors in a cloud com-
5 July 2016, In Press, Corrected Proof—Note to users. puting environment. Future Gener. Comput. Syst., 1–41.
[10] Ismail, L. and Fardoun, A. (2016) EATS: Energy-Aware Tasks [22] Abdullahi, M. and Ngadi, M.A. (2016) Symbiotic Organism
Scheduling in Cloud Computing Systems. Procedia Comput. Search optimization based task scheduling in cloud computing
Sci., 83, 870–877. environment. Future Gener. Comput. Syst., 56, 640–650.
[11] Dasgupta, K., Mandal, B., Dutta, P., Mandal, J.K. and Dam, S. [23] Xu, X., Cao, L. and Wang, X. (2016) Resource pre-allocation
(2013) A genetic algorithm (GA) based load balancing strategy algorithms for low-energy task scheduling of cloud computing.
for cloud computing. Procedia Technol., 10, 340–347. J. Syst. Eng. Electron., 27, 457–469.
[12] Lu, C., Gao, L., Li, X. and Xiao, S. (2017) A hybrid multi- [24] Zhu, A., Xu, C., Li, Z., Wu, J. and Liu, Z. (2015) Hybridizing
objective grey wolf optimizer for dynamic scheduling in a real- grey wolf optimization with differential evolution for global
world welding industry. Eng. Appl. Artif. Intell., 57, 61–79. optimization and test scheduling for 3D stacked SoC. J. Syst.
[13] Lu, C., Xiao, S., Li, X. and Gao, L. (2016) An effective multi- Eng. Electron., 26, 317–328.
objective discrete grey wolf optimizer for a real-world scheduling [25] Kishor, A. and Singh, P.K. (2016) Empirical Study of Grey
problem in welding production. Adv. Eng. Softw., 99, 161–176. Wolf Optimizer. In Proc. Fifth Int. Conf. Soft Computing for
[14] Guha, D., Roy, P.K. and Banerjee, S. (2016) Load frequency Problem Solving, 1037–1049.
control of large scale power system using quasi-oppositional [26] Naznin, F., Sarker, R. and Essam, D. (2012) Progressive align-
grey wolf optimization algorithm. Eng. Sci. Technol. Int. J., ment method using genetic algorithm for multiple sequence
19, 1693–1713. alignment. IEEE Trans. Evol. Comput., 16, 615–631.
[15] Guha, D., Roy, P.K. and Banerjee, S. (2016) Quasi-oppositional [27] Whitley, D. (2002) Genetic Algorithms and Evolutionary
differential search algorithm applied to load frequency control. Computing. Van Nostrand’s Scientific Encyclopedia.
Eng. Sci. Technol. Int. J., 19, 1635–1654. [28] Kohli, M. and Arora, S. (2017) Chaotic grey wolf optimization
[16] Zuo, L., Shu, L., Dong, S., Zhu, C. and Hara, T. (2015) A multi- algorithm for constrained optimization problems. J. Comput.
objective optimization scheduling method based on the ant col- Des. Eng., 1–33.
ony algorithm in cloud computing. IEEE Access, 3, 2687–2699. [29] Mehdi, A., Rashidib, H. and Alizadehc, S.H. (2017) An
[17] He, H., Xu, G., Pang, S. and Zhao, Z. (2016) AMTS: adaptive enhanced genetic algorithm with new operators for task sched-
multi-objective task scheduling strategy in cloud computing. uling in heterogeneous computing systems. Eng. Appl. Artif.
China Commun., 13, 162–171. Intell., 61, 35–46.
SECTION B: COMPUTER AND COMMUNICATIONS NETWORKS AND SYSTEMS
THE COMPUTER JOURNAL, 2018
Downloaded from https://academic.oup.com/comjnl/advance-article-abstract/doi/10.1093/comjnl/bxy009/4953372
by St Bartholomew's & the Royal London School of Medicine and Denistry user
on 25 March 2018
You might also like
- GoCJ DataSet Monte CarloDocument417 pagesGoCJ DataSet Monte CarlobisniskuyNo ratings yet
- Ohsaki2017 Refrensi 16Document14 pagesOhsaki2017 Refrensi 16bisniskuyNo ratings yet
- Hasnain2020 Refrensi 15Document15 pagesHasnain2020 Refrensi 15bisniskuyNo ratings yet
- 322 Refrensi 19Document4 pages322 Refrensi 19bisniskuyNo ratings yet
- Libshorttext Refrensi 14Document5 pagesLibshorttext Refrensi 14bisniskuyNo ratings yet
- Boser1992 Refrensi 12Document9 pagesBoser1992 Refrensi 12bisniskuyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 03 - Handbook of Test Problems in Local and Global OptimizationDocument446 pages03 - Handbook of Test Problems in Local and Global OptimizationArinjayKumarNo ratings yet
- ORI 391Q.4 - Integer Programming Spring 2011 SyllabusDocument3 pagesORI 391Q.4 - Integer Programming Spring 2011 SyllabusJoão Victor OliveiraNo ratings yet
- An Improved Ranking For Fuzzy Transportation Problem Using Symmetric Triangular Fuzzy NumberDocument10 pagesAn Improved Ranking For Fuzzy Transportation Problem Using Symmetric Triangular Fuzzy Numbersudhir_kumar_33No ratings yet
- 15.053 - Optimization Methods in Management Science (Spring 2007)Document9 pages15.053 - Optimization Methods in Management Science (Spring 2007)Ehsan SpencerNo ratings yet
- Optimization of Multimodal Transportation Network Based On Improved Genetic AlgorithmDocument6 pagesOptimization of Multimodal Transportation Network Based On Improved Genetic AlgorithmGana WayneNo ratings yet
- Material For BTS3900&BTS5900 Node Performance Counter Changes (V100R015C10 Vs V100R013C10SPC180)Document14 pagesMaterial For BTS3900&BTS5900 Node Performance Counter Changes (V100R015C10 Vs V100R013C10SPC180)waelq2003No ratings yet
- Sanet - ST 9811906599Document246 pagesSanet - ST 9811906599Khalida MuddasserNo ratings yet
- Day13 K Means ClusteringDocument4 pagesDay13 K Means ClusteringPriya kambleNo ratings yet
- Constrained Optimization-Lecture 11Document2 pagesConstrained Optimization-Lecture 11maimoonaNo ratings yet
- Multiobjective Optimization of Unseeded and Seeded Batch Cooling Crystallization Processes PDFDocument10 pagesMultiobjective Optimization of Unseeded and Seeded Batch Cooling Crystallization Processes PDFPopaNo ratings yet
- Frameworks, Tensegrities, and Symmetry (Robert Connelly, Simon D. Guest)Document299 pagesFrameworks, Tensegrities, and Symmetry (Robert Connelly, Simon D. Guest)Sumit singh100% (1)
- Assignment-2 SolutionDocument17 pagesAssignment-2 SolutionAbhinav RawatNo ratings yet
- Micro Choice 2020Document62 pagesMicro Choice 2020ashutosh patelNo ratings yet
- 5001 - IMS Model Question Paper & AnswersDocument10 pages5001 - IMS Model Question Paper & Answersadharshtbme21No ratings yet
- CH 05Document47 pagesCH 05asd.ksa1090No ratings yet
- 01.CRISP DM Business UnderstandingDocument10 pages01.CRISP DM Business Understandingsankalp singh80% (10)
- TRADING SYSTEM LAB Product Guide Version 1Document11 pagesTRADING SYSTEM LAB Product Guide Version 1monty-sen-8771No ratings yet
- Pile Foundation OptimisationDocument13 pagesPile Foundation OptimisationAce CodyNo ratings yet
- Automated Floorplan Generation in Architectural Design - 2022 - Automation in CDocument13 pagesAutomated Floorplan Generation in Architectural Design - 2022 - Automation in CliupeiNo ratings yet
- Cambridge Uni. Press. 700 Text e BooksDocument330 pagesCambridge Uni. Press. 700 Text e BooksluckyNo ratings yet
- One-Dimensional Cutting Stock Model For Joinery ManufacturingDocument6 pagesOne-Dimensional Cutting Stock Model For Joinery ManufacturingsaurabhsubhuNo ratings yet
- Prelim ProgramDocument18 pagesPrelim ProgramCao Chen-RuiNo ratings yet
- 71R-12 Aace PDFDocument43 pages71R-12 Aace PDFmirakulNo ratings yet
- Harvard Algorithm Class CS124 NotesDocument11 pagesHarvard Algorithm Class CS124 NotesYamini DasguptaNo ratings yet
- 01.0 Learning Objectives PDFDocument2 pages01.0 Learning Objectives PDFAshoka VanjareNo ratings yet
- Ethanol Amine ProductionDocument8 pagesEthanol Amine ProductionFatih FıratNo ratings yet
- Effects of Internal Irreversibility and Heat Leakage On The Finite Time Thermoeconoic Performnac of Refrigerators and Heat PumpDocument13 pagesEffects of Internal Irreversibility and Heat Leakage On The Finite Time Thermoeconoic Performnac of Refrigerators and Heat PumpYalçın DurmuşoğluNo ratings yet
- Yardstick International College Business Faculty: Quantitative Analysis For ManagementDocument32 pagesYardstick International College Business Faculty: Quantitative Analysis For ManagementamirNo ratings yet
- Traffic Prediction and Route Optimization SaranDocument4 pagesTraffic Prediction and Route Optimization Saransotify249No ratings yet
- Problem Solving ApproachDocument7 pagesProblem Solving ApproachKUNAL1221No ratings yet