You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MARY, Woman of Faith, Hope, Love (Lyrics & Chords)Document2 pagesMARY, Woman of Faith, Hope, Love (Lyrics & Chords)Jessa Marie Maquiling88% (8)
- Verus CFT CommercialDocument2 pagesVerus CFT CommercialLuchin SheckNo ratings yet
- The King's CommissionDocument7 pagesThe King's CommissionbillcrewsNo ratings yet
- Epic Rap Battles of Histor1Document3 pagesEpic Rap Battles of Histor1Duong Chi ThanhNo ratings yet
- 10 1016@j Compgeo 2012 07 011Document5 pages10 1016@j Compgeo 2012 07 011MohamedNo ratings yet
- Toyota Hybrid SystemDocument24 pagesToyota Hybrid SystemPedro GonzalezNo ratings yet
- Lesson 5a Tenses LessonDocument86 pagesLesson 5a Tenses LessonWane DavisNo ratings yet
- Representing Data: Keywords @whisto - MathsDocument1 pageRepresenting Data: Keywords @whisto - MathsEmrah ozkanNo ratings yet
- Reading 4Document15 pagesReading 4Heo Mập ÚNo ratings yet
- Transmission Development Plan NGCPDocument37 pagesTransmission Development Plan NGCPTSD CommercialNo ratings yet
- LESSON 2 - Basic Hardware Components of Computer SystemsDocument29 pagesLESSON 2 - Basic Hardware Components of Computer SystemsLenoverNo ratings yet
- LTE Training Baseband Product IntroductionDocument16 pagesLTE Training Baseband Product IntroductionmamadouNo ratings yet
- Deflections Using Energy MethodsDocument28 pagesDeflections Using Energy MethodsAndy AmatoNo ratings yet
- The Development of Incentive For Marginal OilfieldsDocument9 pagesThe Development of Incentive For Marginal OilfieldsBenny LubiantaraNo ratings yet
- Denon AVR5800 - OwnersmanualDocument2 pagesDenon AVR5800 - OwnersmanualFlaviu SzekelyNo ratings yet
- Capacity Report FormatDocument9 pagesCapacity Report FormatsaimaNo ratings yet
- Powershift Knowledge, Wealth, and PowerDocument20 pagesPowershift Knowledge, Wealth, and PowerHese MasNo ratings yet
- Adsorption at Solid InterfaceDocument4 pagesAdsorption at Solid InterfaceVishu DawarNo ratings yet
- Bangkok: Standard Standard Perez 2000-2009 1991-2010Document5 pagesBangkok: Standard Standard Perez 2000-2009 1991-2010Zaw Moe KhineNo ratings yet
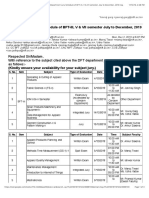
- DFT Department Jury Schedule of BFT-III, V & VII Semester July To December, 2019 RegDocument3 pagesDFT Department Jury Schedule of BFT-III, V & VII Semester July To December, 2019 Regyuvraj gargNo ratings yet
- Theme Quarter 3 Week 8Document28 pagesTheme Quarter 3 Week 8Catherine RenanteNo ratings yet
- 5.TRAINING PATHWAY TAHAP 2&3 BaruDocument2 pages5.TRAINING PATHWAY TAHAP 2&3 Baruainon mismanNo ratings yet
- 1st Term Revision Sheet Primary 6Document38 pages1st Term Revision Sheet Primary 6Mark AdelNo ratings yet
- Dual Display System (US Patent RE36978)Document22 pagesDual Display System (US Patent RE36978)PriorSmartNo ratings yet
- Series 858, Relay Sockets With Industrial RelayDocument6 pagesSeries 858, Relay Sockets With Industrial RelayAhmedNo ratings yet
- Artist 2017Document84 pagesArtist 2017Auryn07100% (2)
- SW Techical DataDocument5 pagesSW Techical DataImer RedzovicNo ratings yet
- Warren World Borealis Wood PDFDocument4 pagesWarren World Borealis Wood PDFChernYangEeNo ratings yet
- Eurotile Pricelist2015Document147 pagesEurotile Pricelist2015Mario Esaúl MirelesNo ratings yet
- The Madwoman in The AtticDocument4 pagesThe Madwoman in The AtticMayra Aguirre RicoNo ratings yet